















































软件

产品


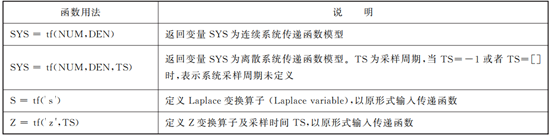
首先将分子分母多项式用向量表示,然后利用MATLAB的控制系统工具箱中的tf函数建立传递函数模型,具体如下:

函数常用用法见下表:
表1.1 tf函数用法
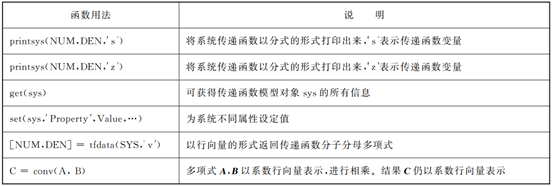
还有一些其他的相关函数如下:
表 1.2 MATLAB中构建传递函数相关函数
接下来举几个例子:
例1-1 利用MATLAB建立如下传递函数模型
(1)方法1
代码:
num=[2 1]; %分子多项式
den=[1 2 4 1]; %分母多项式
G=tf(num,den)
结果:
G =
2 s + 1
---------------------
s^3 + 2 s^2 + 4 s + 1
Continuous-time transfer function.
方法(2)
代码:
s=tf('s'); %先定义Laplace算子
G=(2*s+1)/(s^3+2*s^2+4*s+1)
结果:
G =
2 s + 1
---------------------
s^3 + 2 s^2 + 4 s + 1
Continuous-time transfer function.
调用zpk(z,p,K)函数完成零极点函数模型的创建。
注意:当pamap函数有返回值时不在绘制零极点分布图
例1-1 试用MATLAB建立以下传递函数。
方法(1)
代码:
z1=[-5;-5]; %为零点赋值
p1=[-1;-2;-2-2*j;-2+2*j]; %为极点赋值
k=4; %为增益赋值
G1=zpk(z1,p1,k) %得到系统模型
结果:
G1 =
4 (s+5)^2
--------------------------
(s+1) (s+2) (s^2 + 4s + 8)
Continuous-time zero/pole/gain model.
方法(2)
代码:
s=zpk('s'); %定义算子
G2=4*(s+5)^2/(s+1)/(s+2)/(s^2+4*s+8)
结果:
G2 =
4 (s+5)^2
--------------------------
(s+1) (s+2) (s^2 + 4s + 8)
Continuous-time zero/pole/gain model.
方法2需要注意的是,对于共轭复数表示的零极点,需要展开成二阶多项式的形式。

(1)由A,B,C,D矩阵直接创建状态控制模型
sys=ss(A,B,C,D)
(2)对于离散的状态空间模型,需要设置采样时间Ts
sys=ss(A,B,C,D,Ts)
同样,也可以通过ssdata()函数来获得状态方程对象参数
[A,B,C,D]=ssdata(sys) 获得连续系统参数
[A,B,C,D,Ts]=ssdata(sys) 获得离散系统参数
例1-1 利用ss命令创建以下状态空间模型
代码:
A=[6 5 4;1 0 0;0 1 0]; %给状态矩阵A赋值
B=[1 0 0]; %给输入矩阵B赋值
C=[0 6 7]; %给输出矩阵C赋值
D=[0]; %给前馈矩阵D赋值
G=ss(A,B,C,D) %输入并显示系统状态空间模型
结果:
G =
A =
x1 x2 x3
x1 6 5 4
x2 1 0 0
x3 0 1 0
B =
u1
x1 1
x2 0
x3 0
C =
x1 x2 x3
y1 0 6 7
D =
u1
y1 0
Continuous-time state-space model.
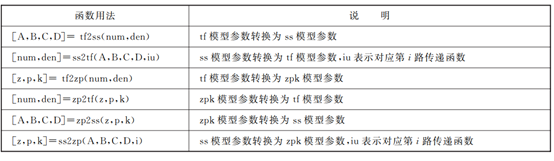
在实际的控制系统设计中,给出的模型跟我们需要的模型可能不是一种描述方式,所以MATLAB为我们提供了不同模型之间转换的函数。主要分为两大类,一类是将其他类型的模型转化成所需模型;另一种是将已有的模型转化成其他形式的模型。
表 1.5 将其他类型的模型转化成所需模型

表1.6 将现有模型转化成其他类型的模型
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















