















































软件

产品


在LS-DYNA中,稳态计算采用隐式求解;动力学计算即可采用显式求解,亦可采用隐式求解。
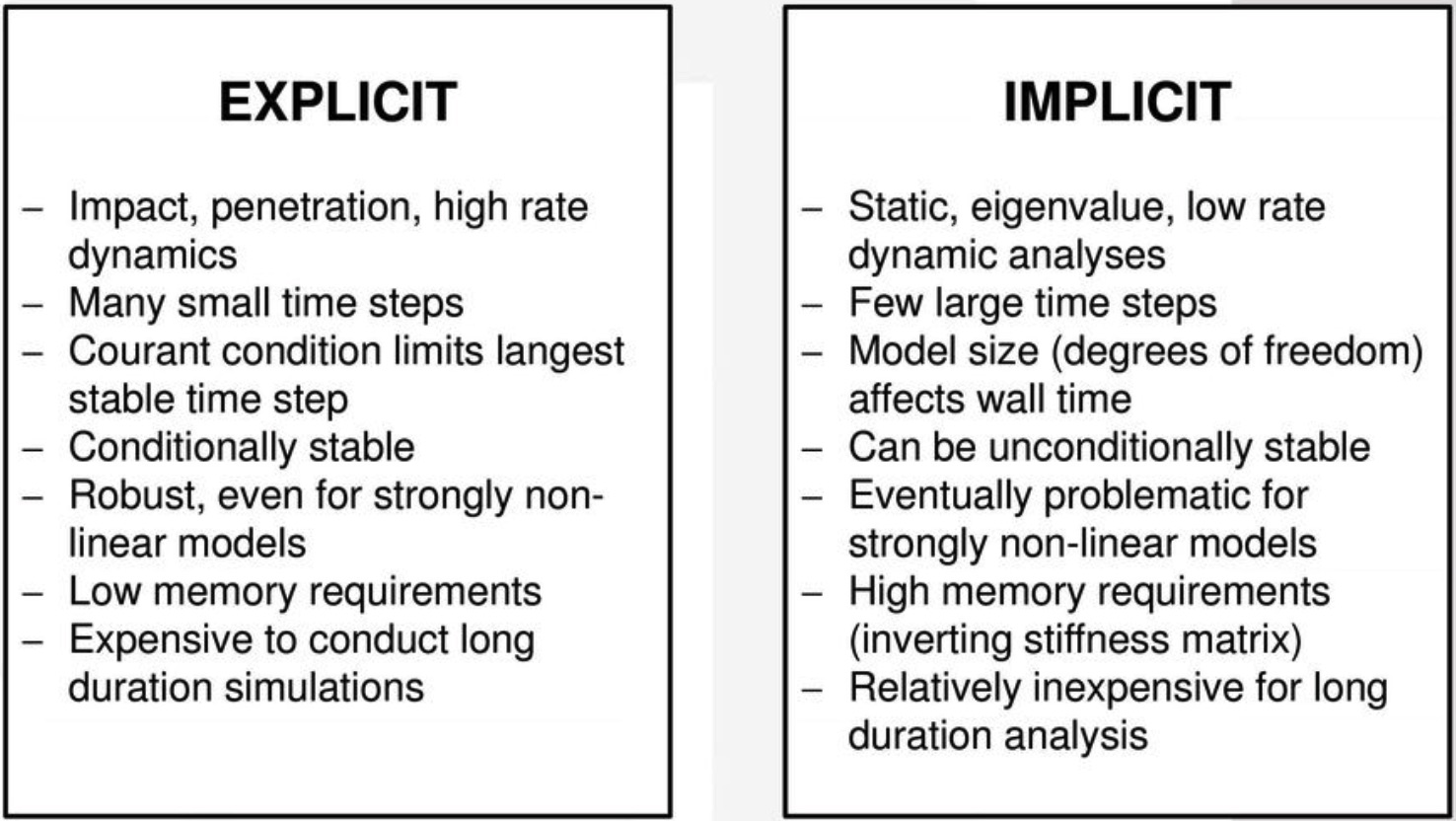
Explicit VS Implicit
隐式时间积分
——不考虑惯性效应(惯性和阻尼)。
——在t+△t时计算位移和平均加速度:{u}={F}/[K]。
——线性问题时,无稳定条件,可以适当放大时间步长。
——非线性问题时,通过一系列线性逼近(Newton-Raphson)来求解;要求转置非线性刚度矩阵[k];收敛时候需要小的时间步;对于高度非线性问题收敛条件苛刻。
显式时间积分
——节点力考虑惯性和阻尼效应
——用时间中心差法:{a}=([F(ext)]-[F(int)])/[M]。
——速度与位移由:{v}={v0}+{a}t,{u}={u0}+{v}t
——新的几何构型由初始构型加上{X}={X0}+{U}
——非线性问题时,块质量矩阵需要简单的转置;方程非耦合,可以直接求解;无须转置刚度矩阵,所有的非线性问题(包括接触)都包含在内力矢量中;内力计算是主要的计算部分;无效收敛检查;保存稳定状态需要小的时间步。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















