















































软件

产品


概述
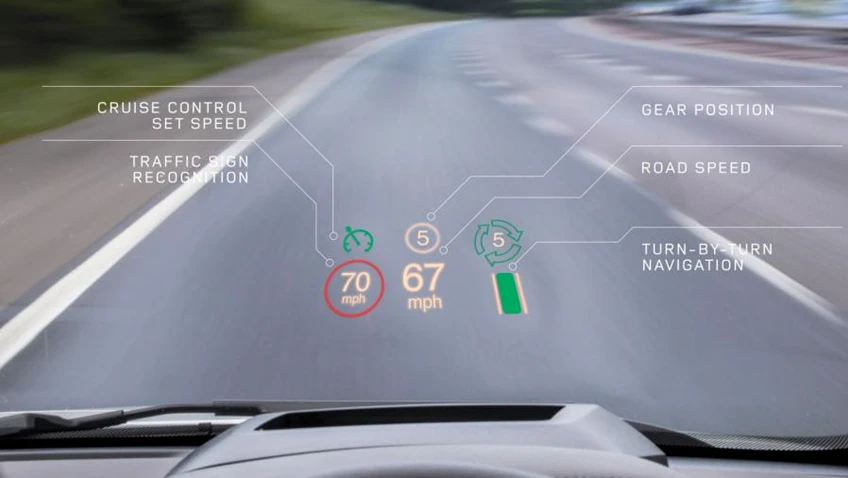
随着汽车智能座舱的普及,HUD的装车率也随之增加,未来也可能会成为车内座舱的标配。而HUD是一个由光学,机械,电子,软件组成的复杂的高科技产品,其所在的汽车座舱是很复杂的环境。我们需要对HUD进行诸如投影,杂散光,热,结构分析,以及驾驶员视角下的HUD显示效果。
杂散光说明
HUD主要是给驾驶员成像显示,所以杂散光尤其影响驾驶员的感知,严重的杂散光甚至会影响驾驶的安全。这样不仅没有带来HUD应有的价值,提升智能座舱的驾乘体验,还会带来不必要的危险。所以消除,减弱杂散光是非常必要的。在HUD系统内,我们按照杂散光来源分为内部杂散光和外部杂散光,其中内部杂散光多是由HUD的成相单元(PGU)的部分光线打到结构件上通过风挡玻璃反光进入到人眼引起,或者是漏光照射到风挡玻璃反光引起;外部杂散光则是由于太阳光照射引起, 一种照射到防尘罩引起反光,一种进入到HUD内部,在成像单元上形成太阳灼烧。

Speos分析杂散光
Speos是Ansys 公司旗下的一款专业的光学仿真分析工具,现在我们通过Speos的光路追迹功能实现HUD的杂散光分析。我们在做光路分析时,依据是光线可逆原则。
接下来我们以找寻外部杂散光为例,看一下具体的设定步骤:
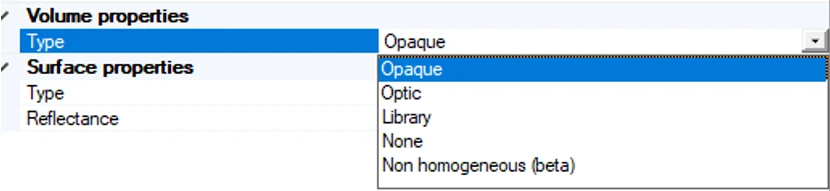
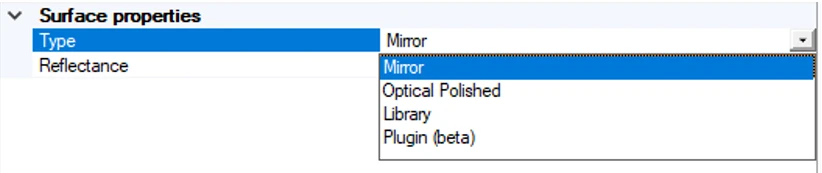
a.定义材料,我们需要对参与的仿真的每个结构进行材料定义,对于HUD 仿真分析,我们定义用到的材料有:反射镜 : VOP-> Opaque & SOP -> mirror,周边结构件 :VOP -> Qpaque & SOP -> library -> 黑色塑料,挡风玻璃 : VOP -> optic & SOP -> optical polished
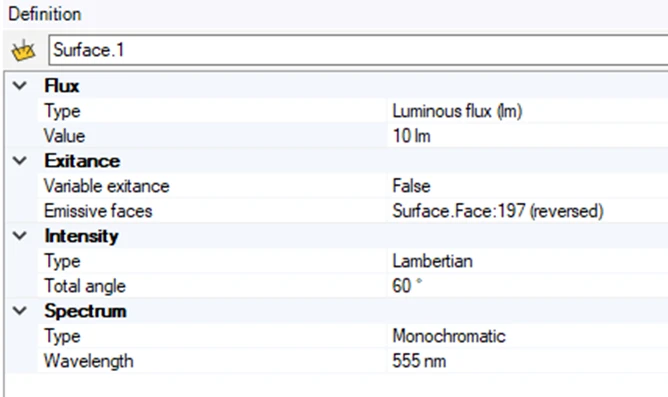
b.光源定义, 在eyebox位置创建等大小平面,对该平面定义为一个面光源,因为只是为了找光路,所以光通量,光谱我们都可以自由定义,推荐单光谱。光型定义为郎勃,扩散角为60°(可以依据需要改变,非固定值)。
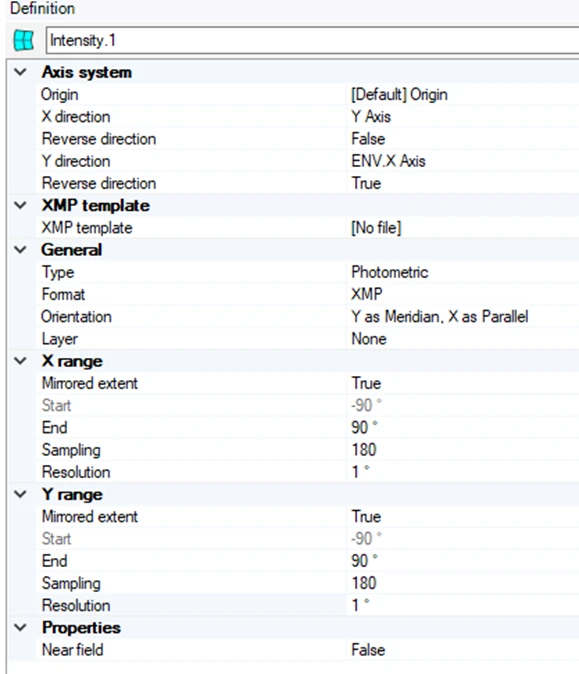
c.探测器定义, 为了捕捉到光路,我们需要创建一个光强探测器来生成光路,找寻外部入射光方向。因为是外部太阳光,所以只需要半球探测器即可。参数如图:
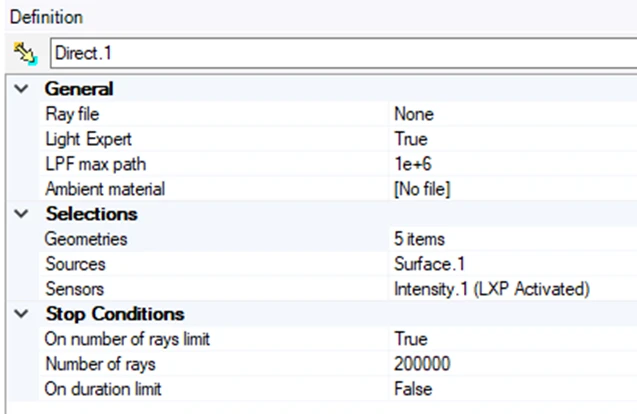
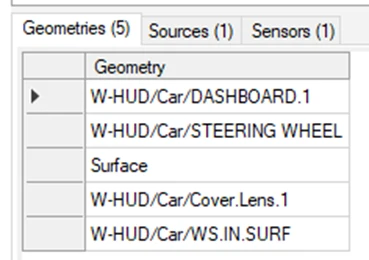
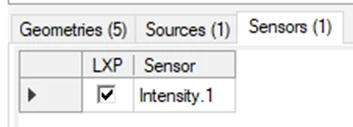
d.定义仿真,计算光学仿真。我们选择direct simulation,在对话内选择参与仿真的相关结构,光源以及探测器。然后输入10^6光线,LXP功能改成true。并且对LXP相关的sensor进行勾选。

e.结果查看,分析光路,打开.lpf结果, 设置level 的value值0.1,我们这是为了尽量看到更多的结果。
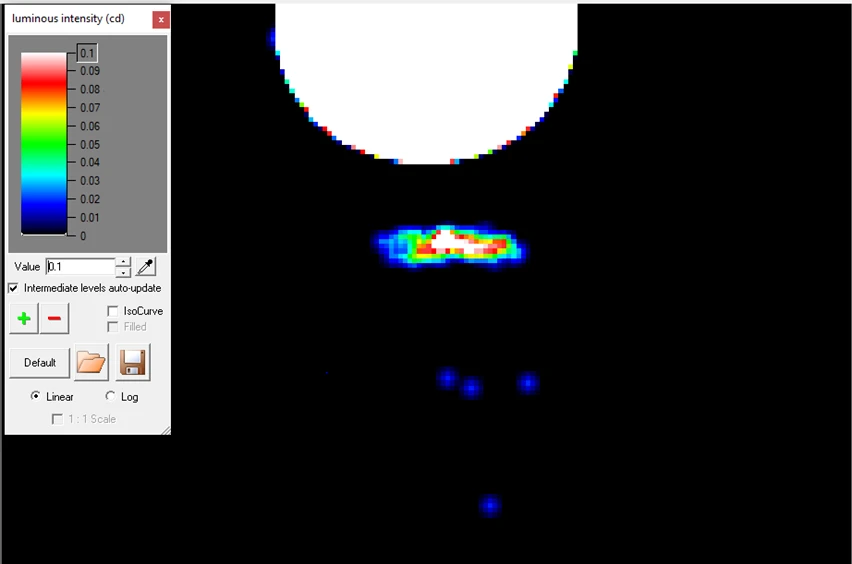
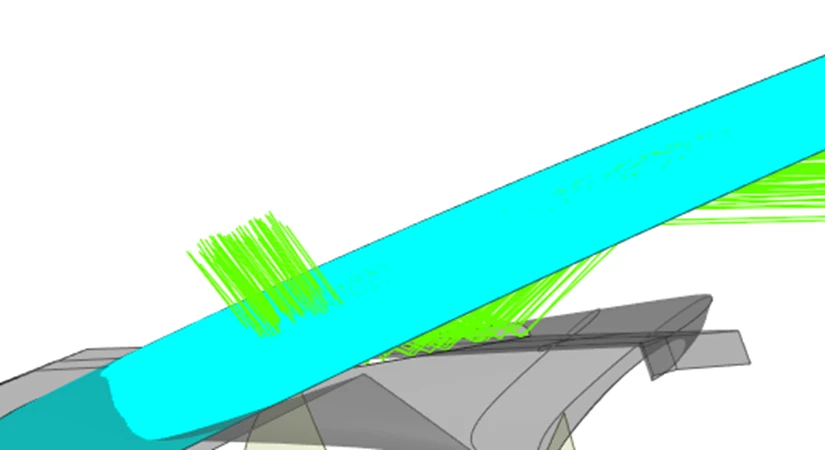
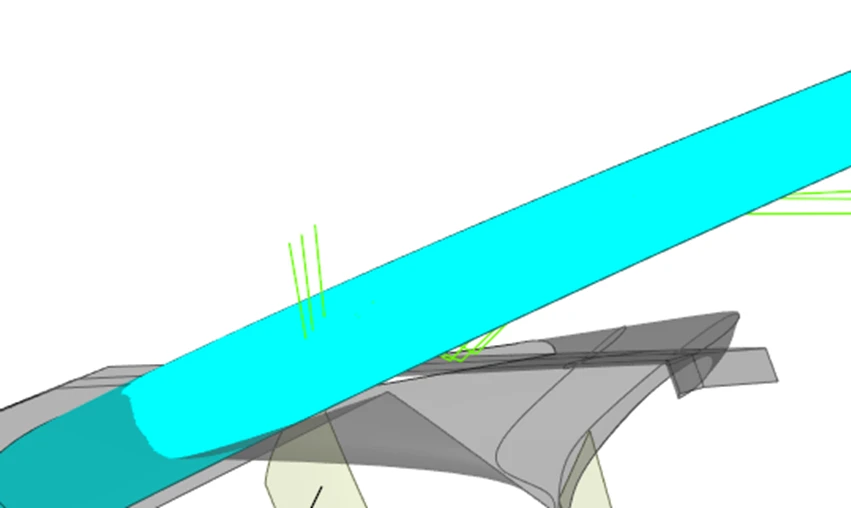
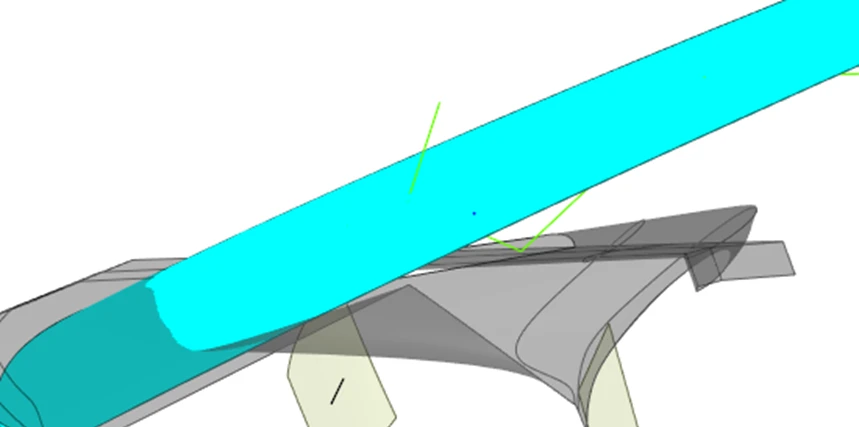
从图中我们可以看到,除了最上面白色的位置为正常光源,其他地方均为可以发生杂散光的入射角度。我们分析其中一部分来观察。点击measure,可以看到如下图:
结语
根据我们以上的分析,接下来我们就可以设置诸如挡板,或者改变防尘罩曲率来让按照这写入射角度的太阳光进入不到人眼,来达到消除杂散光的目的。对于内部的杂光分析,过程和外部是一样,只是变为更直接的分析,不需要先进行反向分析。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















