















































软件

产品


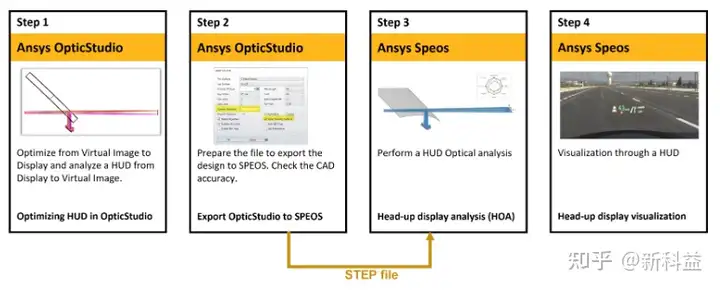
在本篇文章中,我们将展示如何使用Ansys光学解决方案设计和分析HUD系统。首先,Ansys OpticStudio用于设计和优化整个系统,以实现高质量的光学性能。
完成此阶段后,在Ansys Speos中执行详细的分析和验证,其中HOA(HUD Optical Analysis)功能可根据自定义的真实指标验证整个系统的光学性能。
最后,Speos把设计的HUD数据集成到真实环境中,将驾驶员看到的内容可视化到模拟结果中。
操作流程概述
HUD系统多用于汽车或飞机,为驾驶员在其视野范围内提供视觉信息。它由一个显示器和一个光学系统组成,该系统为驾驶员创建虚影像。光学系统和显示屏被放置在仪表板下方。
第一步是在OpticStudio中定义HUD系统。规格包括虚拟图像距离、视场范围、放置空间、挡风玻璃定义、眼位和PGU (Picture Generation Unit)。
定义系统后,我们可以使用OpticStudio优化工具优化镜面并检查性能。
OpticStudio最后的设计可以导出到Speos。Speos包含的HOD和HOA设计分析模块可在Premium和Enterprise版本下作为附加组件使用,该模块可以量化汽车HUD系统的虚拟图像质量。
分析步骤发生在Speos中。将CAD模型导入Speos之后,就可以运行HOA了。设置包括定义眼位、目标图像、挡风玻璃、镜子和PGU。
对于每个项目,用户输入可以从OpticStudio读取的设置,并选择相关的对象。一旦设置完成,就可以运行HOA,并提供完整的报告。
Speos还允许为不同的eyebox位置可视化HUD系统。这个模拟显示了从驾驶员视角看到的虚拟映像。可视化可以包括座舱几何形状
、周围环境和天气。我们的案例展示了HUD鬼像分析,其中挡风玻璃没有楔角。
运算和结果分析
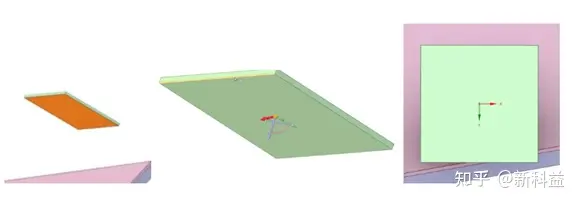
第一步,我们设计HUD。在这个例子中,HUD是由一个自由曲面镜子(这将被优化)和一个平面镜组成的。司机透过挡风玻璃看路面。
一些例如车速的信息显示在PGU上,来自PGU的光被两个镜子反射,进入司机的眼睛。司机看到道路上速度信息的虚拟图像。
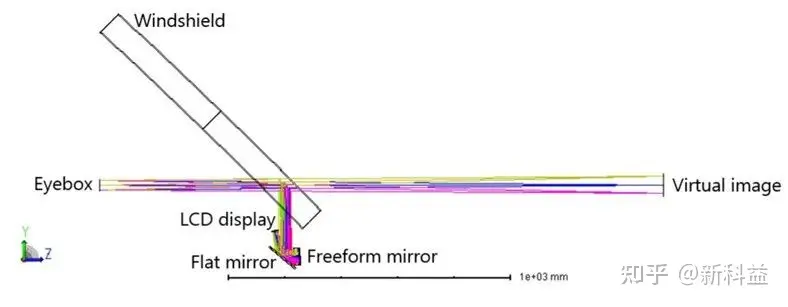
在OpticStudio中,设计从反向模型开始,即从虚拟图像到PGU。从驾驶员看到的虚拟图像开始模拟是很方便的,
因为STOP表面被放置在系统的前面,也就是eyebox所在的位置。OpticStudio中的STOP表面是物体空间入口瞳孔直径。
它定义了进入光学系统的光线束。由于在STOP前面没有光学装置,入口瞳孔就是STOP本身。eyebox规格可直接设置到STOP面。
在STOP表面上放置一个矩形孔来描述eyebox。场点表示虚像。STOP表面和挡风玻璃之间的距离推出了眼睛的位置。
挡风玻璃在这里被定义为一个扩展多项式曲面。这镜子就设置在它们的最终位置。
风挡玻璃的形状增加了PGU发出的光的像差,优化自由曲面反射镜可以部分纠正这一问题。
建立了一个价值函数来成像所有的场点(最小均方根光斑半径)。它还包含额外的限制,如放大和失真。
自由曲面镜是根据Zernike Standard凹陷表面来建模的。
1. 打开包含初始设置的Zemax模型(hud_step1_mf_before_optimal .zar)。
2. 通过运行本地优化器(在“Optimize…Optimize”下)来优化自由窗体镜像。
3. 将自由曲面镜像的系数Z4、Z5和Z6设置为变量,并运行本地优化器(在“Optimize…Optimize”下)。
4. 将自由曲面镜像的系数Z7, Z8, Z9, Z10和Z11设置为变量,并运行本地优化器(在“Optimize…Optimize”下)。然后运行全局Hammer优化器1分钟(在“Optimize…Hammer Current”下)。
设计可以导出为CAD文件,然后导入到Speos。为了简化Speos中设计的导入,在物体上增加了一个矩形孔径来描述虚拟图像。在PGU上也添加了一个矩形孔径来描述显示的范围。
由于导出为CAD数据可能意味着准确性的损失,建议检查内置模型(包含曲面解析描述的模型)和CAD模型之间的结果。
如果没有发现差异,则对CAD描述具有良好的置信度。OpticStudio中可以使用两种配置进行评估。
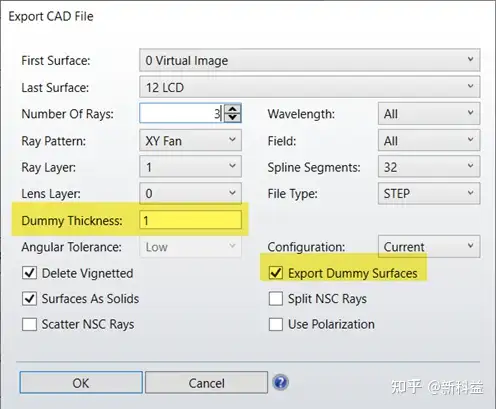
1. 打开包含初始设置的Zemax模型(HUD_Step1_MF_after_optim_apertures.zar)。
2. 将设计导出到STEP文件。要使所有表面在Speos中可用,选择“Export Dummy Surfaces(导出虚拟表面)”,虚拟厚度为1。
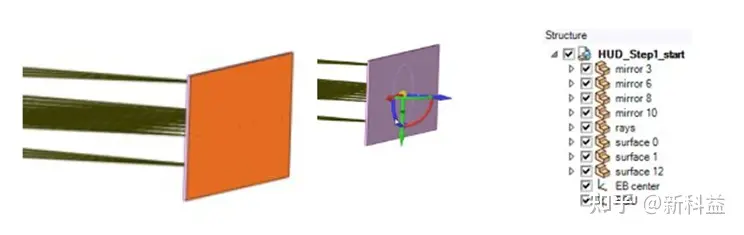
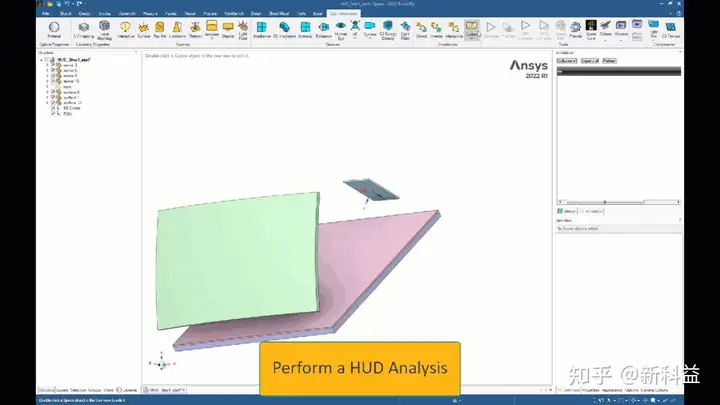
1. 将STEP文件导入Speos。要显示.stp文件,选择“All Supported Files(HUD_Step1_start.stp)”。为了便于显示,请按名称从“A到Z”对结构树中的几何图形进行排序。
2. 将新文件保存为HUD_Step1_start.scdoc。
坐标轴参考系(Reference axis system)
HOA需要一个参考轴系统的eyebox和PGU。

1. 在3D视图中选择eyebox的背面(表面0)。
2. 在Design选项中,创建一个轴系统。使用移动功能使轴系统与全局轴系统的方向对齐(提示:双击蓝色和绿色箭头将使轴系统旋转90度)。
3. 将轴系重命名为“EB center”。
1. 在3D视图中选择PGU的正面(表面12)。
2. 在Design选项卡中,创建一个轴系统。使用移动功能将轴系统与PGU的方向对齐(提示:点击红色箭头,然后点击“定向到对象”,然后选择PGU的水平轴)。
3. 将轴系统重命名为“PGU”。
一旦完成了这些,就可以运行HOA模块。HOA是一个直观的工具,必须定义HOA的每一项以运行分析。

车辆轴(Vehicle axes)
第一步是为HOA定义坐标轴。在OpticStudio设计中,Z轴为车辆方向,Y轴为顶部方向。
1. 在light simulation选项卡中,单击system,然后单击HUD Optical Analysis。
2. 在simulation 窗口中,将车辆方向设置为Z轴,顶部方向设置为Y轴系统(在属性中,勾选“每个eyebox样本的可视化”和“光学的可视化”设置为True)。
然后设置包括eyebox,目标图像,挡风玻璃,镜子,PGU。对于每个项目,用户选择对象,然后输入可以从OpticStudio读取的设置。
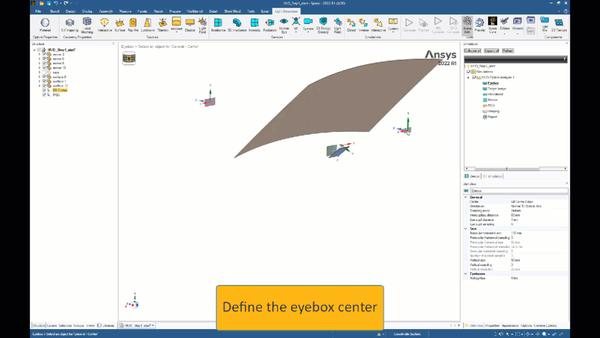
eyebox(Eye box)
1. 在simulation窗口中,选择eyebox。
2. 在3D视图中,单击eyebox。
3. 选择eyebox中轴系统。
4. 在HOA定义面板中填写属性。
目标图像(Target Image)
1. 在simulation窗口中,选择目标图像。
2. 在HOA定义面板中填写属性。
挡风玻璃(Windshield)
1. 在simulation窗口中,选择挡风玻璃。
2. 在3D视图中,先选择挡风玻璃内表面(mirror 3),再选择挡风玻璃外表面(mirror 3),外表面只需要计算鬼像。
3. 在HOA面板中填写属性。

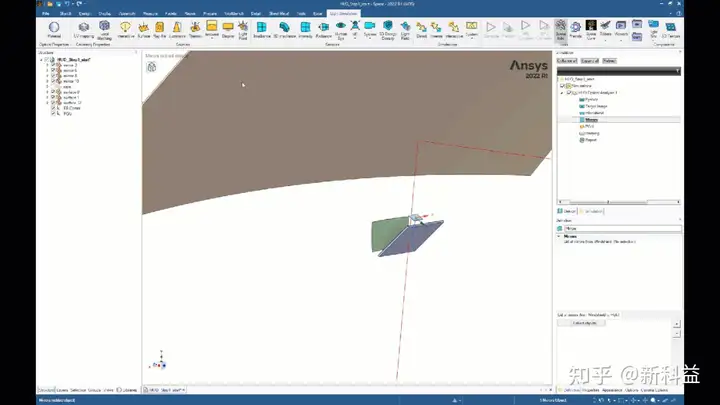
镜像面(mirror)
在这个HUD设计中,折射镜有两种光线交互作用。光线从PGU到折射镜,到Freeform镜,然后回到折射镜,到挡风玻璃,然后是eyebox。
1. 在simulation窗口中,选择镜像面。
2. 在3D视图中,单击 并选择(按ctrl键进行多个对象的选择)折射镜(mirror 6)、自由Freeform镜(mirror 8)和另一个折射镜(mirror 10)。
提示:mirror 6和mirror 10有切线面(可以使用鼠标滚轮在几何图形中进行切换选择)。
3. 在HOA定义面板中填写属性。在镜子列表中选择从挡风玻璃到图像生成单元(PGU)的镜子。
图像生成单元(PGU)
1. 在simulation窗口中,选择PGU。
2. 在HOA定义面板中填写属性。
注:为了更高的精度,增加PGU采样(9x5或更高)。这会影响计算时间。
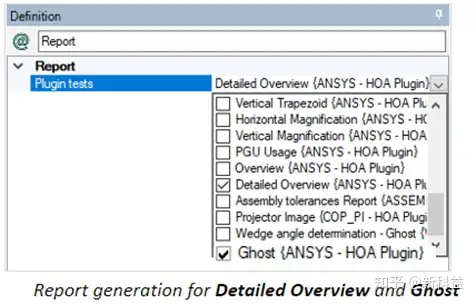
报告设置(Report settings)
HOA设置完成,我们可以选择输出项。
可以运行的一个有趣的分析是PGU的Warping。它显示驾驶员查看由PGU显示的图像是如何被扭曲的。
1. 在模拟树中,选择Warping。
2. 在HOA定义面板中填写属性。
3. 在 Image box > File,加载Zemax OpticStudio PGU.png。
Build & Export warping 模式将以一个未失真的图像作为输入,并生成一个预失真的图像,该图像可应用于PGU,以补偿系统引入的失真。
可以运行其他报告。只需在Report下面的Simulation树中选择它们。
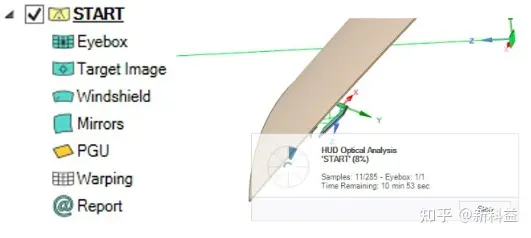
HOA结果分析
HOA设置完成可以正式点击运行了。
1. 在simulation窗口中,选择HOA特性并将其重命名为START。
2. 单击Compute以运行模拟。'
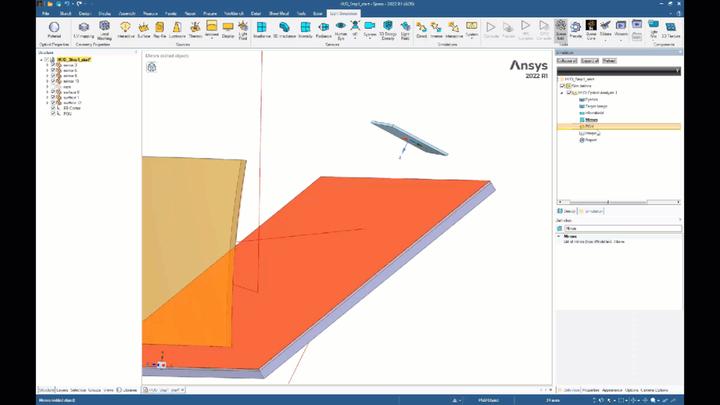
3D视图和报告查看
虚拟图像以及其他指标显示在3D视图中。详细的结果可以在.html报告中找到。
1. 在3D视图中观察虚拟图像和其他指标。
2. 打开.html报告查看详细结果。

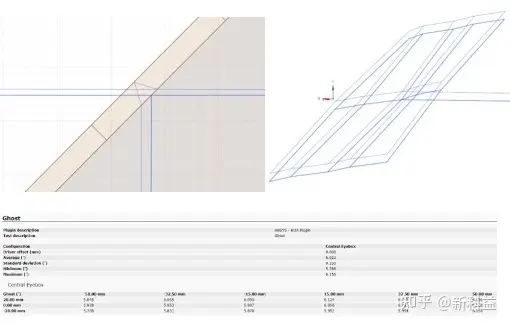
鬼影分析(Ghost Image)
鬼影光线路径和鬼影图像都被计算,显示出来了。
1. 在3D视图中观察鬼影图像。
2. 打开报告查看Ghost测试结果。
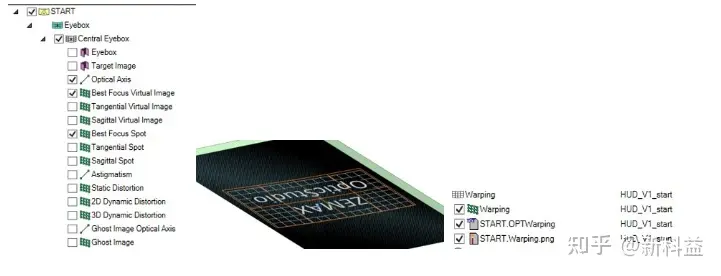
畸变和虚像分析(Warping and virtual image)
可以在Speos输出文件文件夹或HOA特性下找到结果。PGU在3D视图上显示扭曲的图像。
1. 观察PGU。畸变图形已经进行了调整应用。
2. 观察驾驶员视角下的最佳聚焦图像(点击eyebox中轴系统的平面图视图)。增加缩放系数,以检查最佳焦点。
3. 打开反畸变图像和原始图像。
4. 打开变形文件。
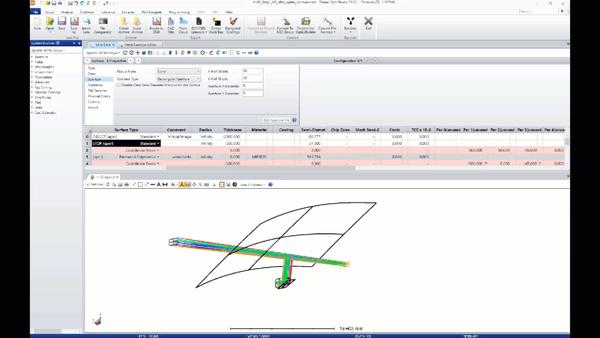
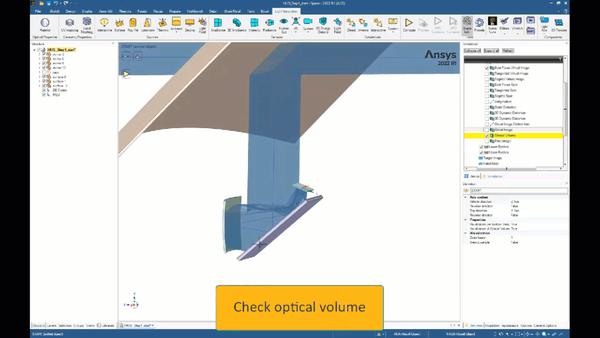
光学路径体(Optical volume)
光学路径体在3D视图上显示。
1. 在HOA定义面板中,检查光学路径体。
2. 在3D视图中,检查optical volume是否在镜像面和PGU尺寸范围内。
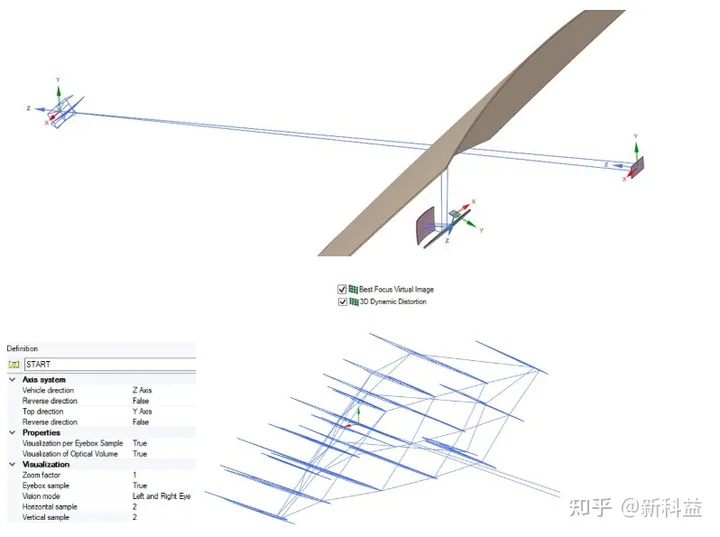
动态畸变(Dynamic distortion)
1. 在HOA定义面板,Visualization组中,将eyebox示例设置为True。视觉模式允许在左右眼或双眼之间切换。
2. 改变水平样本和垂直样本,从不同的眼箱位置观察3D视图中的动态失真。
Speos可以通过HUD系统帮助不同驾驶员(不同的眼框位置)看到的东西可视化显示在模拟结果中。对于这一步,Speos要求挡风玻璃和HUD的两个镜像面都有材料应用。
创建材料属性(Create Materials)
为了进行可视化,挡风玻璃和镜子需要有材料属性应用。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















