















































软件

产品


01
这个网球发射器可以左右、上下摇摆,以控制发球的侧偏和俯仰角度,两个滚轮通过转动将网球加速,抛射出去。
在Abaqus中,这些机构的运动可以通过Connector来建模。

侧偏和俯仰角度
储球桶内的带孔挡板以一定的角速度转动,挡板的孔洞与桶底的孔洞重合时,网球落下,这样保证定时落球。

定时落球机构
网球的气体-结构(球皮)耦合行为通过Fluid Cavity来表征,需要创建一个气动型流体腔,指定模型的通用气体常数、设置内部空气的摩尔质量等参数。

网球的流体腔模型
初始化之后,网球陆续落入滑道,通过滚轮发射出去。
网球发射器发球模型
这个时候,任务还没完成,我们希望发球器每次抛出的球具有不同的落点,还要做些二次开发工作。
仿真中随机性的引入
02
关于有限元仿真中是否有随机性的问题,正常情况下,显然是没有的,同一个模型不改变参数,每一次的仿真结果必然都会一样。
那么如何将随机性引入仿真中呢?
一种方法是通过VUAMP子程序来实现,就是下面我用的方法。
需要注意的是,在子程序中调用随机数时不能只考虑random_number,因为这样只能生成伪随机数,为了让每一次仿真的结果都不同,比如让Abaqus模拟掷骰子时每次运行都有新的点数,还要考虑用于生成随机数的种子。
这部分Fortran代码如下:
real :: t
call random_seed ()
call random_number(t)

Abaqus模拟掷骰子
为验证这个模型是否具有随机性,我写了2个Python脚本,将同一个模型跑100次job、并批量处理了生成的100个odb文件,每个结果输出一个渲染后的点数图。

利用Python自动处理结果
结果表明,同一个模型运行100次,每次计算的结果都不一样(100次模拟总有几次点数一样,但即使点数一样,骰子最终落点的位置也不一样,因此每一次的结果都不一样),在不严格的意义下,可以认为这个有限元模型具备了一定的随机性。
下面是从输出的100张图片中随便选出的4个点数图。
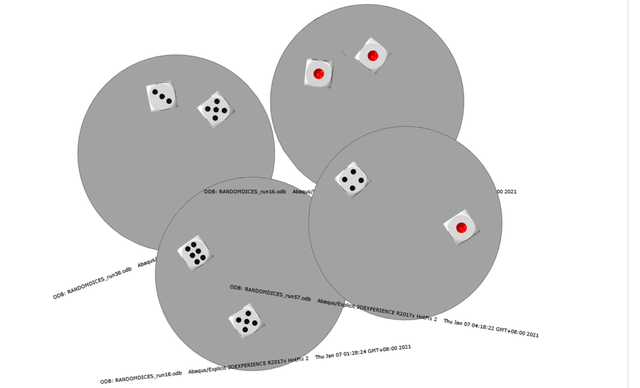
模拟结果点数图
网球随机发球器
03
现在,我们把掷骰子的模拟思路用在网球发射器模型上,通过VUAMP子程序定义滚轮在某个速度区间内的随机转动,每次抛球、每次仿真都有新的落点。

随机发球
每次发射落点不一样
每次运行结果不一样
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















