















































软件

产品


今天来看一下辐条变形装置的实际应用-捡球器(被动变形)和月壤样本采集系统(主动变形)。
01.捡球器

捡球中...
捡球器Abaqus分析模型
捡球器Abaqus模型的主要部分是沿圆周均布的40根辐条,辐条材料为钢,模拟采用线弹性材料本构,单元类型选用beam;辐条可整体绕中心轴转动,接触到地面、网球时会发生弹性变形。
边界条件设置捡球器手柄的下压、前推、上提过程。

捡球中...
看一下捡球器是如何把球吃进去的:

辐条“搭”到网球上

辐条的弹性变形
汽车轮胎花纹的横纹缝隙里经常会卡到一些比缝隙大的石子,这个过程某种程度上和上面捡球器的力学过程是类似的。
02.月壤样本采集系统
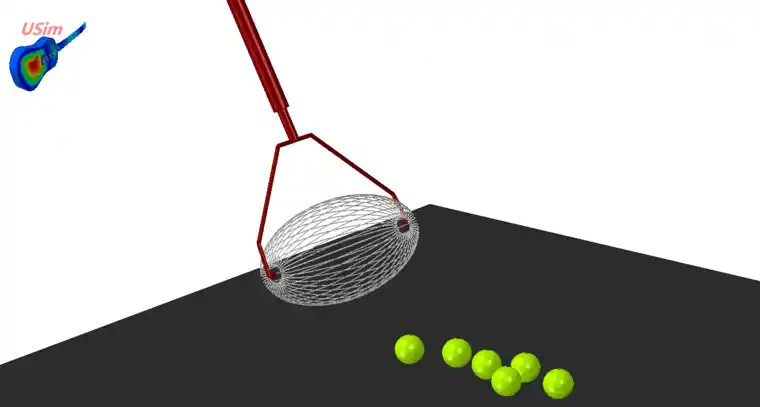
捡球器是利用辐条的被动变形来工作的,下面这个有点像打蛋器的装置,利用主动变形,调节辐条开口缝隙,实现拾取不同尺寸月壤样本的功能。

月壤样本采集系统
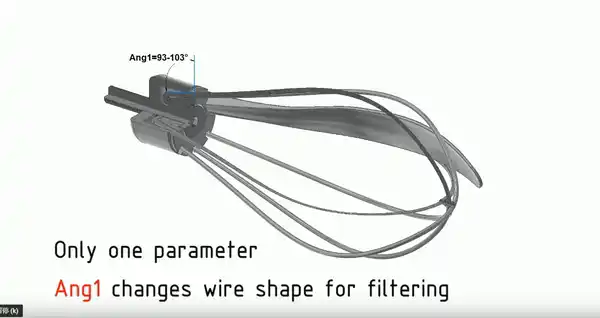
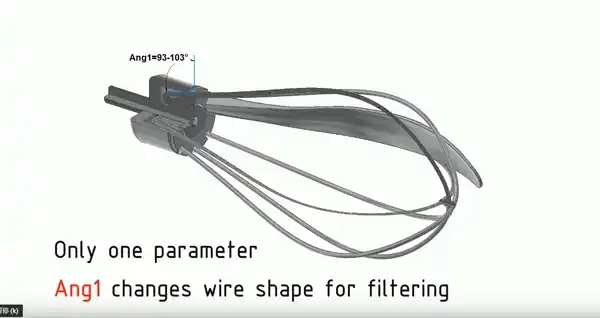
采样爪参数调节
通过改变参数Ang1在93°到103°之间变化,采样爪会进入三种不同模式,可以拾取不同尺寸的月壤样本。
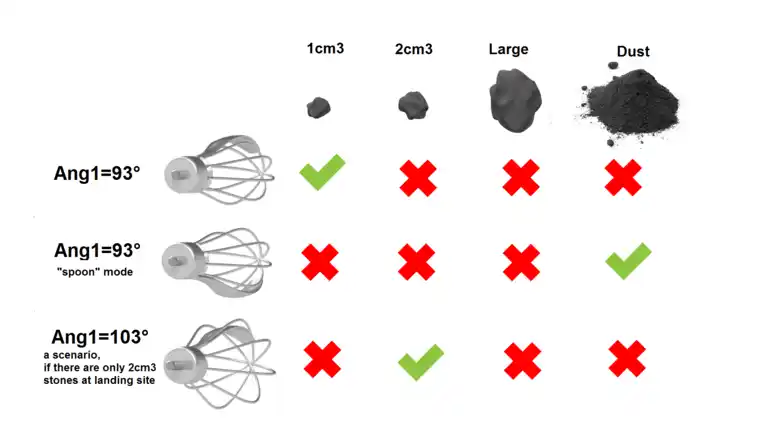
采样爪的三种模式
该设计来自于2018年NASA面向全球的月球采样系统设计挑战赛的冠军作品,作者lauri.link,如果进一步通过NASA的测试试验,这个idea将会在未来月球车采样系统中得到应用。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















