















































软件

产品


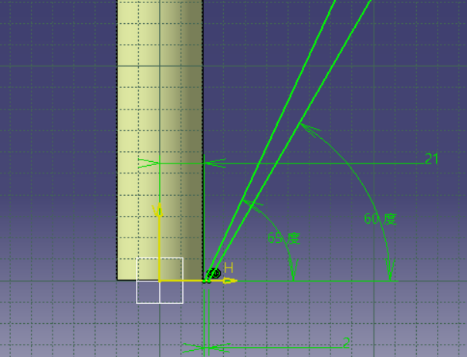
中间的缠绕杆为刚体,直径40mm,长1000mm,内圈纤维与外圈纤维的夹角为5度,纤维的竖向长度与纤维杆尺寸差不多就可以,纤维与缠绕杆的关系如下图所示。
Property模块:
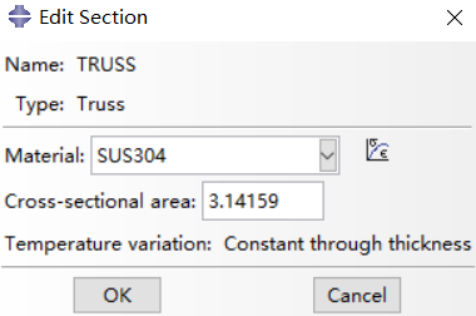
纤维的材料为SUS304(定义密度,弹塑性,塑性参数太多了,无法列举出来),单元类型为杆单元(我尝试过使用梁单元但是没成功,如果非用梁单元分析,质量缩放不要设置太大,而且要增加阻尼,但数值不要设置的过大),纤维杆为刚体,如果在Database中将纤维杆类型设置为刚体,必须在part模块中定义RP点(Part中定义的RP点与Assembly中定义的RP点不同)。
Assembly模块:
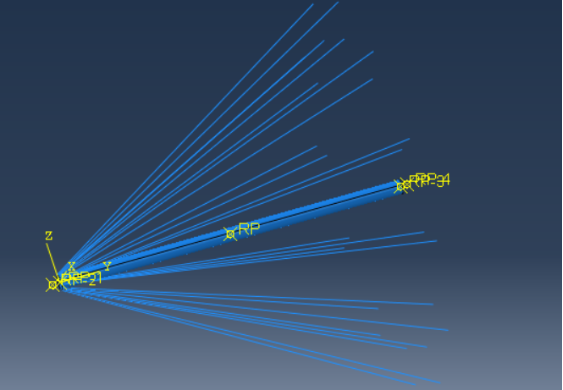
纤维杆在中间,纤维内圈和外圈各12个(间隔30度),环绕在纤维杆的四周。
Step模块:
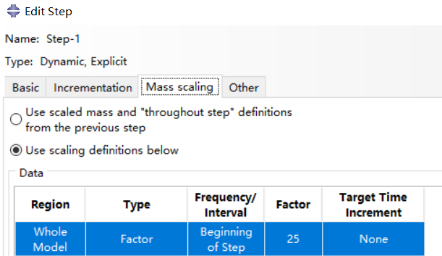
显示动力学分析步,分析时间为3s,场变量与历史变量输出为系统默认,但尽量少输出的选项以减少计算量,共输出200帧。

显示动力学有质量缩放的功能,可以加快计算速度(因为什么可以百度),质量缩放设为25,即速度加快5倍(开根号后就是加快的速度),用质量缩放因为我的笔记本带不动。
Interactioppn模块:
接触方式为通用接触,接触参数的设置默认,接触属性为法向硬接触(Hard Contact),切向粗糙接触(Rough),最开始尝试时,切向的接触为摩擦接触,但是纤维之间会发生切向的滑动,效果很不理想。默认情况下线与线之间的接触,只能用显示动力学的通用接触,隐式算法(Stastic,Implicit)想用线与线(Edge to Edge Contact)之间的接触,要编辑关键字(2016版本以后才有的功能)。
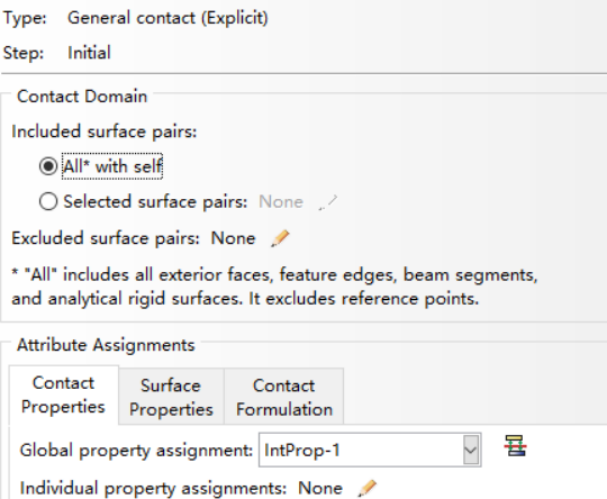
通用接触设置
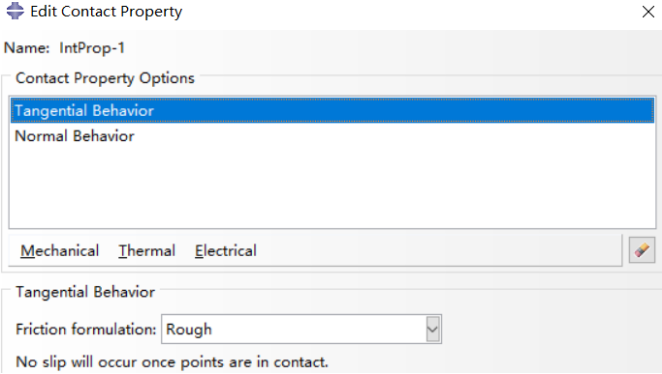
接触属性设置
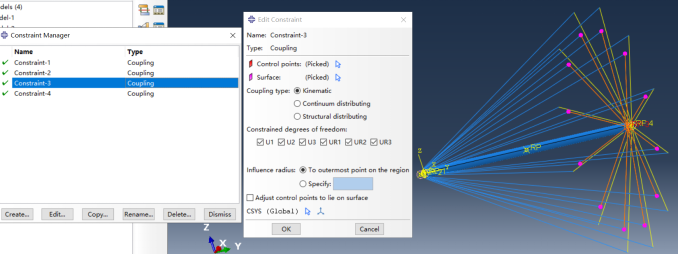
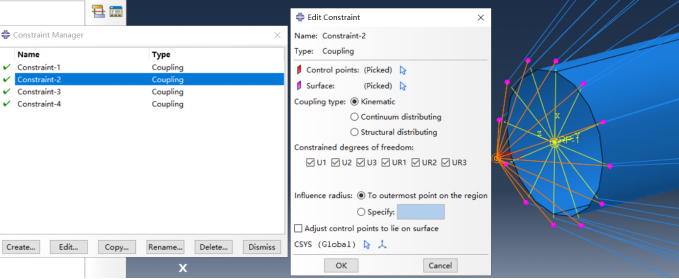
内圈与外圈纤维的首,尾端点Cpupling到中心处,方便施加旋转速度载荷,一共4个Coupling点(Control Point为RP点)。
Load模块:
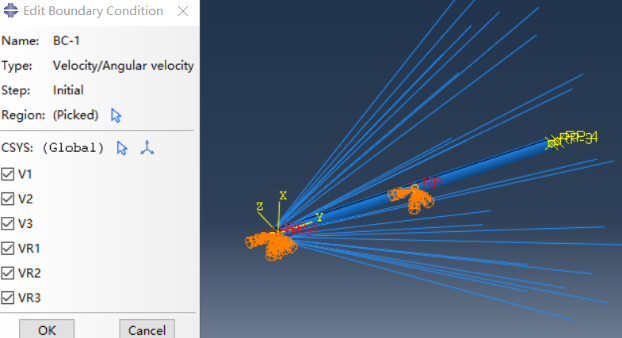
刚体纤维杆约束6个自由度,下图中左侧内外圈纤维Coupling的两个中心点约束6个由度。
下图中纤维(首)内圈与外圈的Coupling点旋转的方向相反(另一个速度的数值为负值),纤维的旋转速度为1rad/s,因为要保持恒定的速度运动,所以要定义幅值曲线。
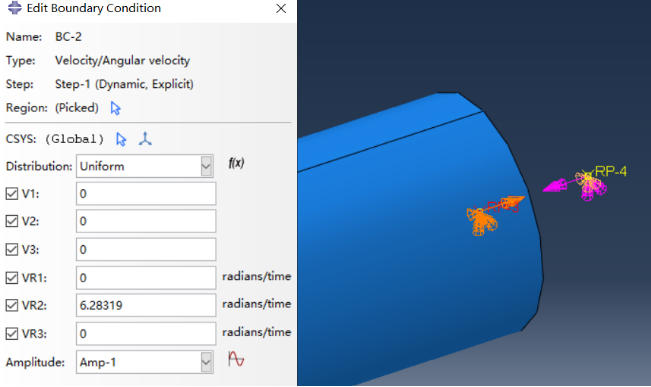
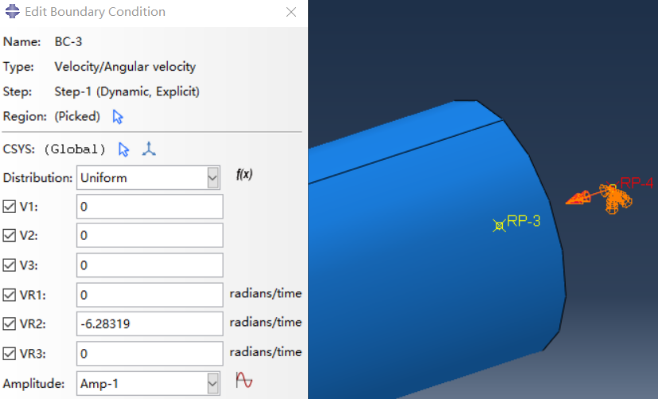
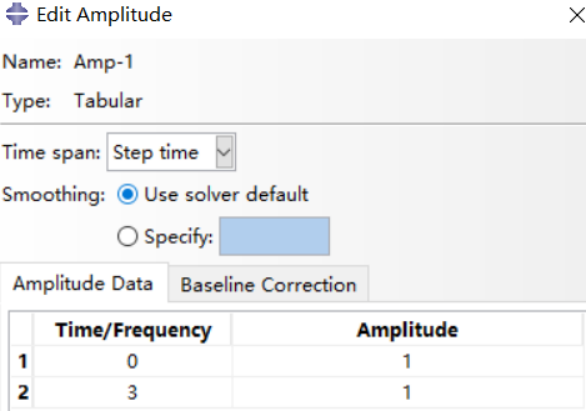
速度的幅值曲线
Mesh模块:
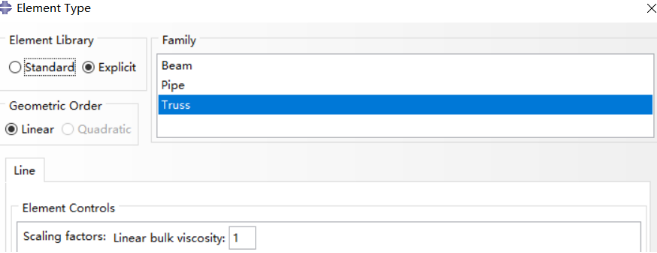
因为纤维使用的是杆单元(Truss单元),所以杆单元的网格属性需要重新定义(1D单元网格属性默认为梁单元,不改会报错)。
后处理模块:
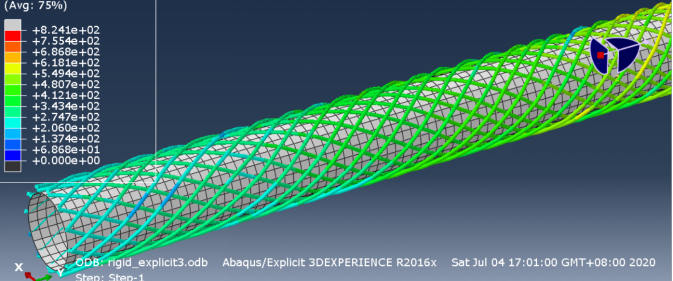
后处理中显示杆单元的截面
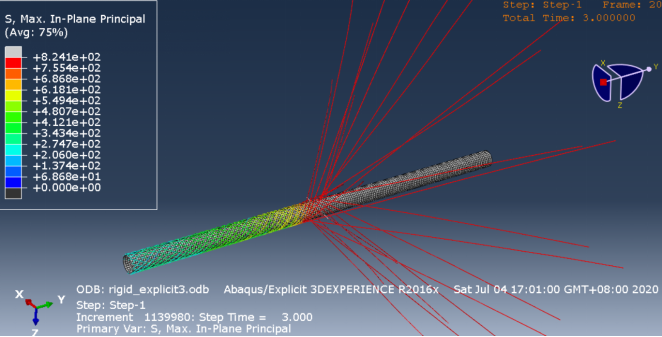
杆单元仿真结果
下图中,纤维使用的是梁单元,后处理结果显示纤维的扭曲比较严重,而且纤维发生较大的切向移动,总之结果很不理想。
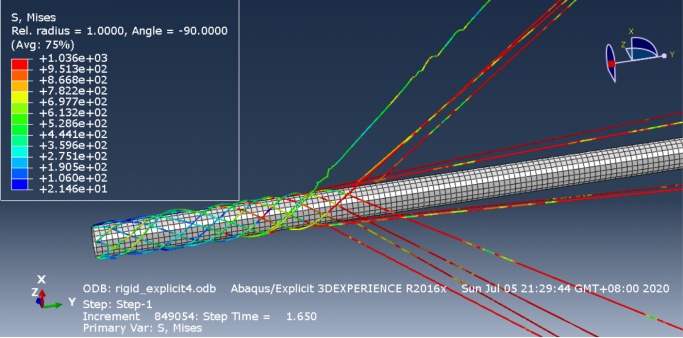
梁单元的仿真结果
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















