















































软件

产品


本文描述的鸟撞是模拟鸟撞击飞机叶片,共使用两种方法CEL方法与SPH方法。由于鸟的密度与水接近,所以鸟的材料为水。
首先介绍CEL方法:
CEL方法需要定义欧拉域,本例主要通过离散场(Discrete Field)中的体积分数工具(Volume Fraction Tool)定义预定义场。
Part模块:
整体结构比较简单,1个叶片,1个小鸟,1个欧拉域。叶片的模型是我在网上找的;小鸟在建模时不必太复杂,因为与叶片相比鸟的体积很小,模型越简单越好,此处小鸟的模型为胶囊的形状,而且使用体积分数工具定义欧拉域时,小鸟只用来切分欧拉域定义水的初始位置,并不参与计算。欧拉域的形状应尽可能规则,因为CEL方法要求欧拉域只能划分六面体网格。

小鸟
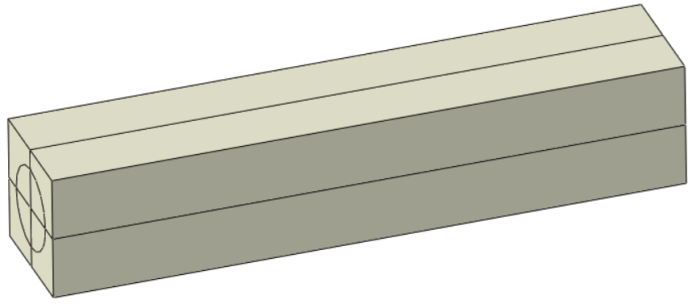
欧拉域

飞机叶片
Property模块:
由于我没有用钛合金材料的参数,飞机叶片的材料定为钢材,小鸟的材料为水,水的材料在之前的文章中多次介绍过,不再赘述。
Assembly模块:

有限元模型
Step模块:
Explicit显式动力学分析步,分析时间为0.01s,场变量与历史变量的输出选项默认设置。
Interaction模块:
CEL方法只能使用通用接触,接触属性为法向硬接触(Hard Contact),切向罚摩擦(Penalty)接触,摩擦系数为0.2。

法向硬接触
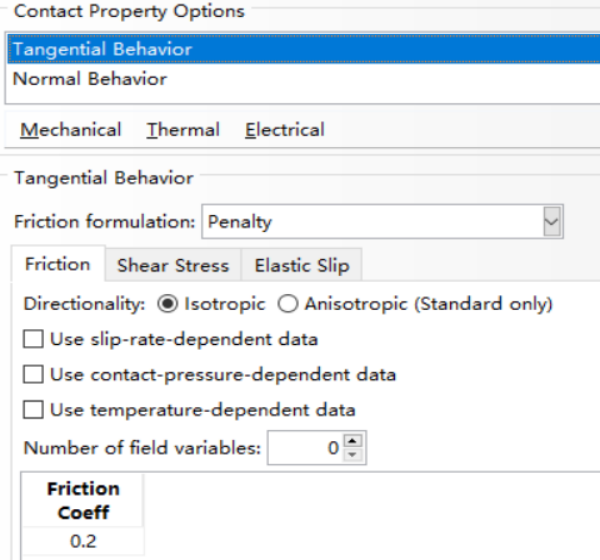
切向摩擦接触
将叶片的内环定义为显式体,显式体并不参与计算,下图中深蓝色的部分就是显示体。

显式体
将叶片的内侧Coupling到中心点处,便于施加载荷。
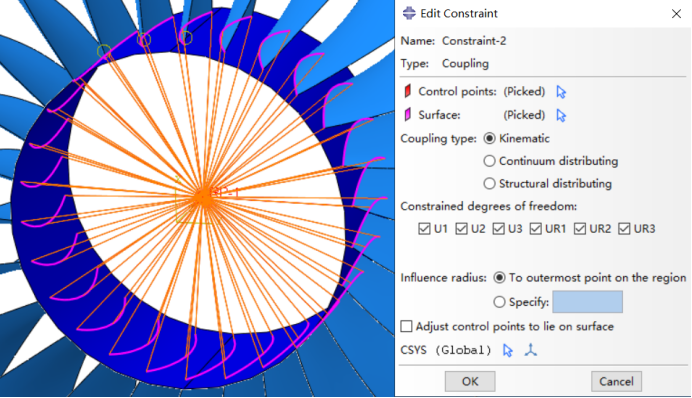
Coupling约束
Load模块:
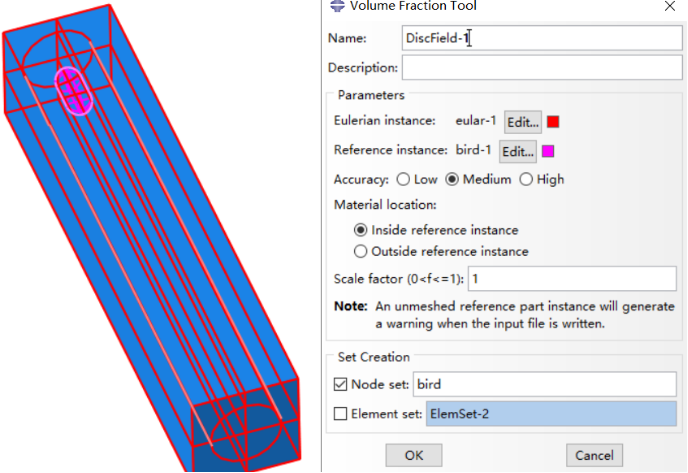
首先使用体积分数工具定义初始欧拉域,此处用到了Part模块提到的小鸟,用于切分出水的初始位置(紫色部分),在进行此步骤之前应先划分欧拉域(红色部分)的网格,软件会根据小鸟的形状切分欧拉域的网格得到水初始区域的网格形状,为方便后续定义载荷,创建一个节点集(Node set)命名为bird。
约束Coupling中心点的自由度,释放X的旋转自由度(VR1),定义角速度时使用预定义场的初速度载荷,下图中的黄色的坐标系代表局部坐标系,定义边界条件时默认使用全局坐标系(图形交互界面左下角的坐标系),如果需要使用局部坐标系,点击下图中CSYS右侧的蓝色箭头即可。

通过预定义场(Predefined Field)的方式定义叶片的角速度载荷,定义方式为Rotational only,定义角速度需自己输入两个点的坐标定义旋转轴。

定义欧拉域的边界条件,为了防止水在撞击叶片后流出欧拉域,需定义欧拉域的边界条件,定义欧拉域的边界条件时只能使用速度载荷,不能用位移载荷,还可以使用欧拉边界条件定义。欧拉域是长方体共有6个表面,分别约束相应方向的自由度(全局坐标系)即可。

V1边界条件

V2边界条件

V3边界条件
定义欧拉域的初始位置即水的初始位置,使用第二种方法(Discrete fields)离散场方式定义,Region选择Part欧拉域(红色部分),DiscField-1为上述使用体积分数工具定义的离散场,缺点就是无法在界面中显示水的初始位置,所以为方便定义水的初速度,应定义节点集(Set)。

定义水的初速度,此处便用到了上述提到的bird节点集,由于无法在图形交互界面显示水的初始位置,无法通过Picked的方式选择区域(Region),只能通过定义节点集的方式定义水的初速度载荷(全局坐标系)。

Mesh模块:
上述提到过,欧拉域只能划分六面体网格,而且网格越密,后处理中效果越好,但计算时间越长。其余零件网格属性默认即可。
Visualization模块:
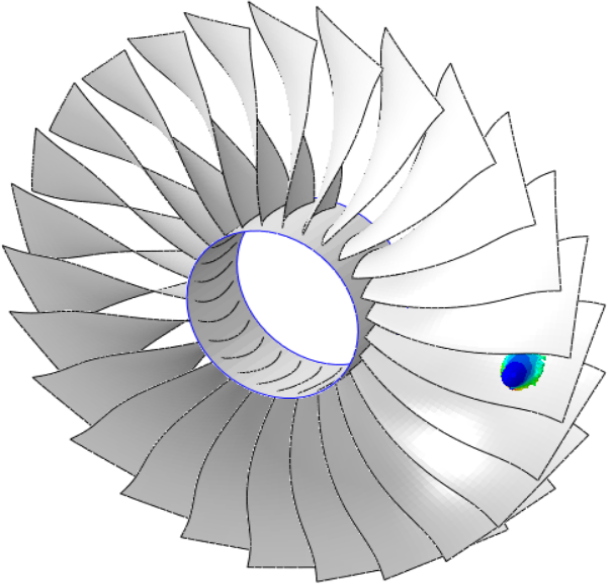
SPH方法:
SPH方法与CEL方法有许多不同之处,但是两者载荷工况都是一样的,此处只介绍两种方法的不同之处。SPH方法的具体理论我也不是很懂,目前只停留在傻瓜式操作的阶段。
Part模块:
SPH方法没有欧拉域的概念,没有Part欧拉域,但是Part小鸟参与计算。
Assembly模块:
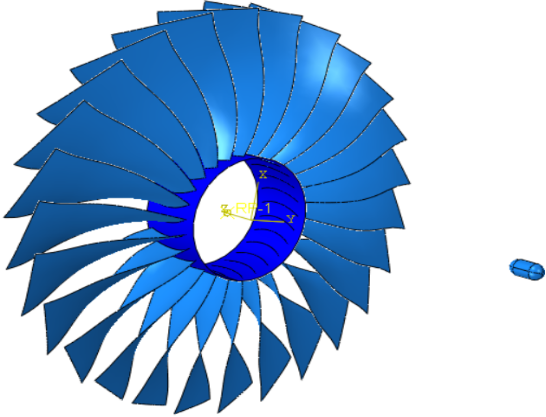
有限元模型
Interaction模块:
与CEL方法类似,接触方式为通用接触,接触属性相同。据说SPH方法可以使用面对面接触,从面选择节点(node region)。
Mesh模块:
此处定义小鸟转化为粒子的相关参数。下图中的Conversion to particles定义了网格转化为粒子的相关参数,Time表示通过时间定义,Threshold为0时代表在分析时间0秒时,网格均转换为粒子,也可通过应力,应变的方式定义网格转换为粒子。PDD代表每个网格转换为粒子的数量。

网格属性
Visualization模块:



免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















