















































软件

产品


一、下载 jetson-stats
sudo apt install python3-pipsudo pip3 install jetson-stats打开jtop,数字1,2,3,4,5,6,7切换页面,查看自己的系统版本
sudo jtop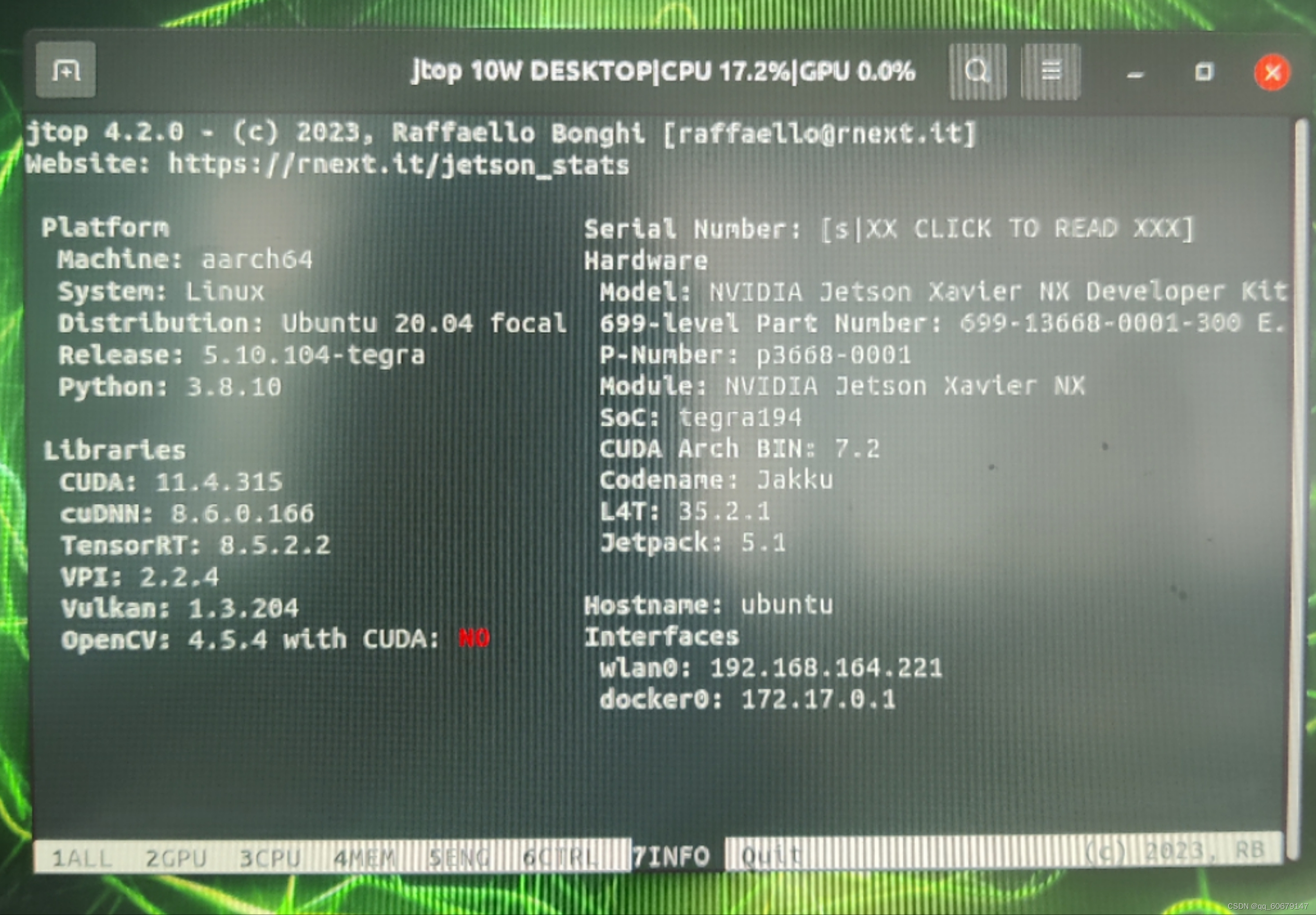
二、换源
先备份源文件,再打开编辑
cp /etc/apt/sources.list /etc/apt/sources.list.bakgedit /etc/apt/sources.list在文本编辑器里把原来的源注释掉,粘贴进新的源
【注】NX板是arm64架构,源链接内必须包含....-ports
清华源ubuntu-ports | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
https://mirrors.tuna.tsinghua.edu.cn/help/ubuntu-ports/
粘贴以下内容,保存
deb https://mirror.tuna.tsinghua.edu.cn/ubuntu-ports/ focal main restricted universe multiversedeb https://mirror.tuna.tsinghua.edu.cn/ubuntu-ports/ focal-updates main restricted universe multiversedeb https://mirror.tuna.tsinghua.edu.cn/ubuntu-ports/ focal-backports main restricted universe multiversedeb https://mirror.tuna.tsinghua.edu.cn/ubuntu-ports/ focal-security main restricted universe multiversedeb https://mirror.tuna.tsinghua.edu.cn/ubuntu-ports/ focal-proposed main restricted universe multiverse更新源
sudo apt-get update三、安装ROS
1.添加ROS源,终端输入
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'2.添加密钥,继续输入
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6543.更新
sudo apt update4.安装ROS桌面完整版
sudo aptitude install ros-noetic-desktop-full5.设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcsource ~/.bashrc6.初始化 rosdep
参考链接:本文之后,世上再无rosdep更新失败问题!如果有....小鱼就... (qq.com)
#一句一句输入sudo pip install rosdepc sudo rosdepc init rosdepc update7.运行ros,打开三个终端输入
# 启动ROS Masterroscore # 启动小海龟仿真器rosrun turtlesim turtlesim_node # 启动小海龟控制节点rosrun turtlesim turtle_teleop_key看到小乌龟,能键盘控制小乌龟运动即可。
四、安装相机驱动 librealsense
安装时不要连相机
1.RealSense SDK安装
git clone https://github.com/jetsonhacks/installRealSenseSDK2.下载,运行
sudo ./installLibrealsense.sh3.查看结果,可以插上 D435i相机,输入
realsense-viewer
可看到2D彩色图像和深度图像都正常
五、Miniforge安装
1.官网下载Miniforge的安装包.sh文件,找到适合自己的版本
Releases · conda-forge/miniforge (github.com)
例如下载Miniforge-pypy3-4.10.3-3-Linux-aarch64.sh,代表适用于arrch64架构下的Linux系统。
2.进入到miniforge的sh文件所在目录,右键打开Terminal,输入以下命令进行安装:
sh Miniforge-pypy3-4.10.3-3-Linux-aarch64.sh3.安装完毕后,添加环境变量,否则会出现bash:conda Command not found的错误。顺便提一下vim编辑器按a是进入编辑模式,编辑完毕后按ESC退出编辑模式,再输入:wq!是保存并退出。
# 编辑环境变量vim ~/.bashrc# 增加环境变量, 将<username>换成你的用户名export PATH=/home/<username>/miniforge-pypy3/bin:$PATH# 激活环境变量source ~/.bashrc# 显示(base)source activate4.更换下载源为清华源(base下)
conda config --prepend channels https://mirrors.ustc.edu.cn/anaconda/pkgs/main/conda config --prepend channels https://mirrors.ustc.edu.cn/anaconda/pkgs/free/conda config --set show_channel_urls yes5.更换pip源
创建并进入pip.conf文件
mkdir ~/.pipcd ~/.pipvim pip.conf在pip.conf 文件中添加
[global]index-url = https://pypi.mirrors.ustc.edu.cn/simple/安装完毕
六、Miniforge配置 虚拟环境
1.conda创建虚拟环境,先按照上面的source activate 进入 (base),再输入:
conda create -n your_env_name python=x.x示例的虚拟环境是 python=3.8
2.安装Pytorch
如果跑的是 YOLO 算法,就按照requirements.txt里要求的版本下载 torch 和 torchvision
官网下载 .whl 文件,内含教程,如果 CUDA 版本是11.4,可下载Pytorch v1.11.0PyTorch for Jetson - Jetson & Embedded Systems / Jetson Nano - NVIDIA Developer Forums
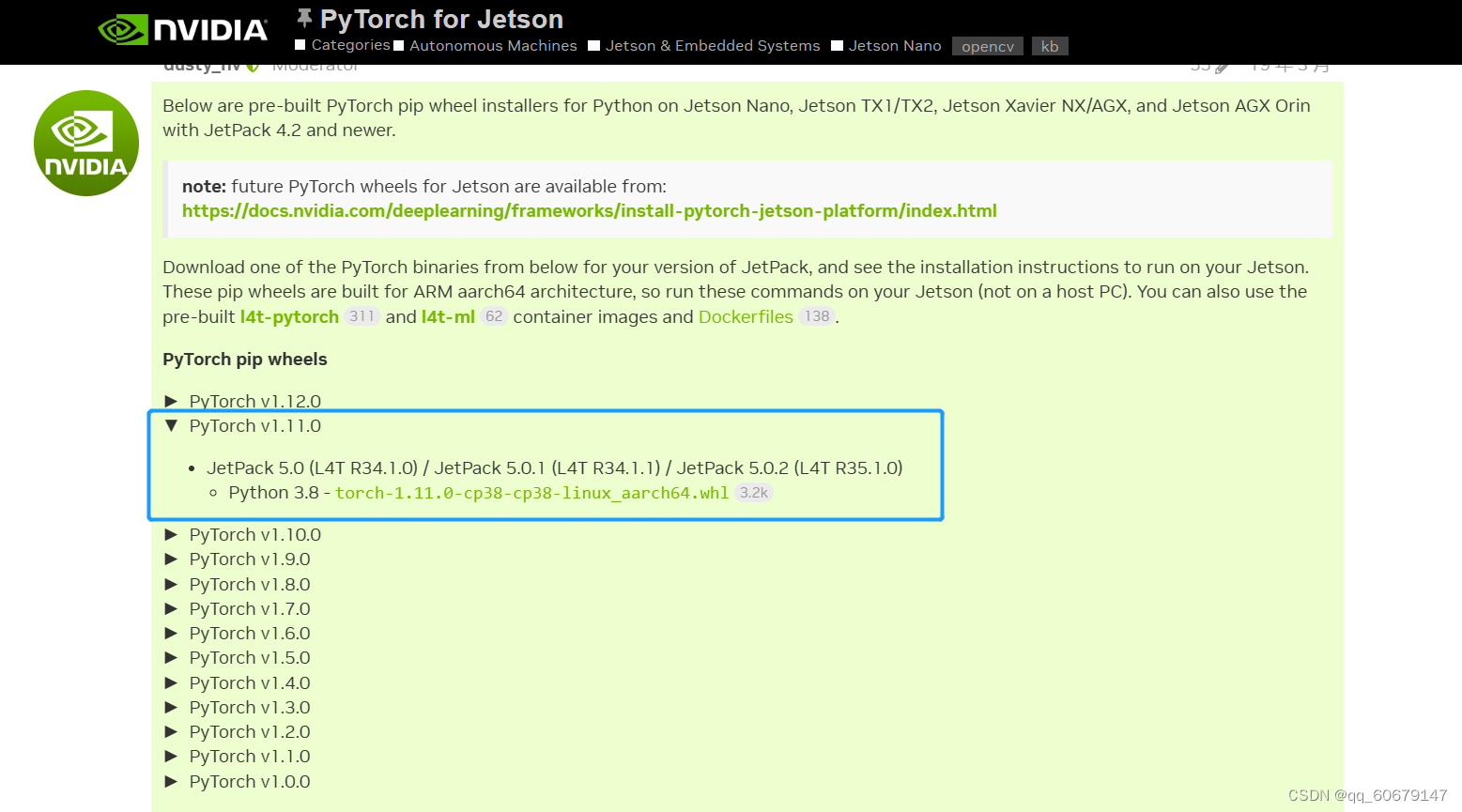
......cp38.....的意思是对应python=3.8
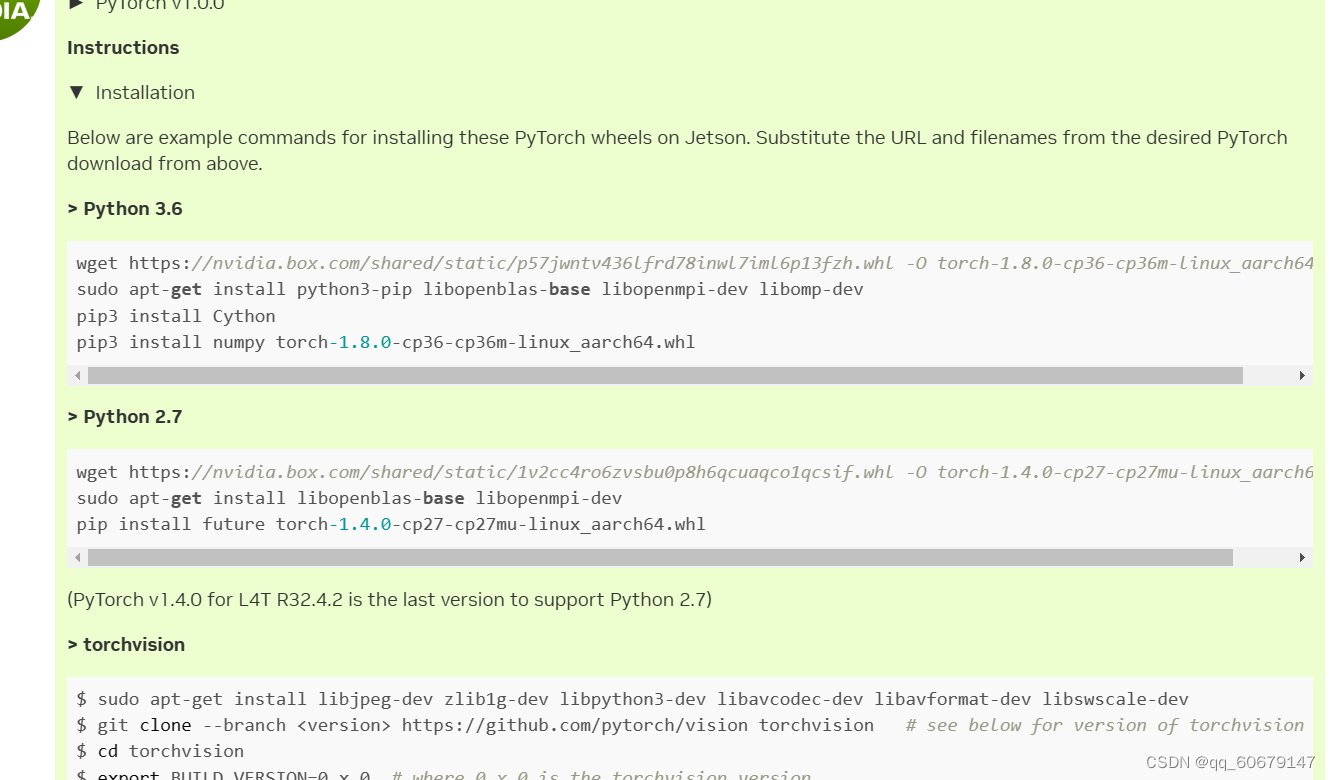
下载好.whl 文件后,.whl文件复制到主目录 (home) ,打开终端输入
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev libomp-dev pip3 install Cython pip3 install numpy torch-1.11.0-cp38-cp38-linux_aarch64.whl3.安装 torchvision
torchvision必须和torch版本配对,看清版本对应
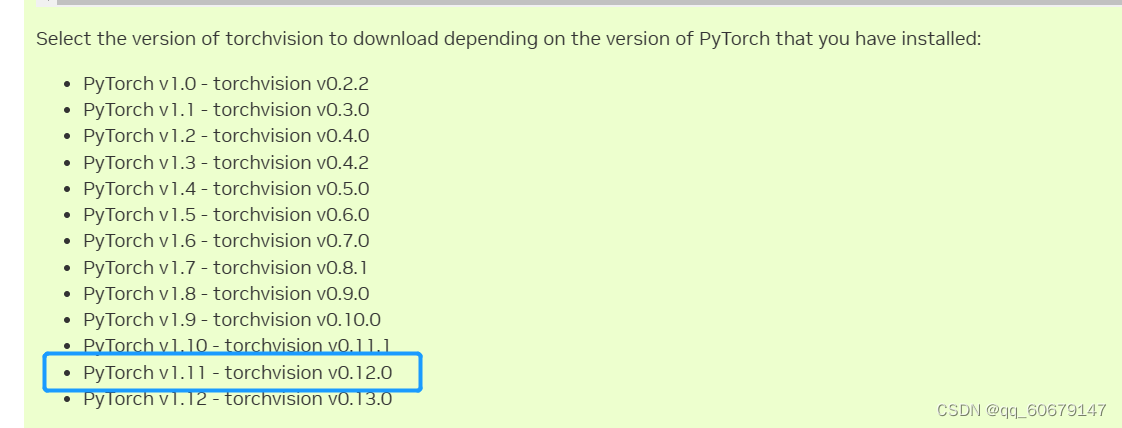
#下载依赖sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev#克隆到本地git clone --branch v0.12.0 https://github.com/pytorch/vision torchvision #打开目录cd torchvisionexport BUILD_VERSION=0.12.0 # where 0.x.0 is the torchvision version #安装 python3 setup.py install --usercd ../ #安装完成pip下载对应的 torchaudio
检查是否安装了CUDA版本的torch
python >>>import torch >>>print(torch.cuda.is_available())#返回true即为安装正确True4.如果要跑YOLO,其他的包都可以直接按照 requirements.txt 上的要求,pip 下载即可
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















