















































软件

产品


一、代码下载地址
https:// github .com/ros-perception/open_karto.git
https://github.com/ros-perception/slam_karto.git
代码分为两部分 :open_karto、slam_karto
采用通用的图 优化方法,Karto_SLAM是基于图优化的思想,用高度优化和非迭代 cholesky分解进行稀疏系统解耦作为解。图优化方法利用图的均值表示地图,每个节点表示机器人轨迹的一个位置点和传感器测量数据集,每个新节点加入,就会进行计算更新。
Karto_SLAM的ROS版本,其中采用的稀疏点调整(the Spare Pose Adjustment(SPA))与扫描匹配和闭环检测相关。landmark越多,内存需求越大,然而图优化方式相比其他方法在大环境下制图优势更大,因为他仅包含点的图(robot pose),求得位姿后再求map。
二、扫描匹配部分
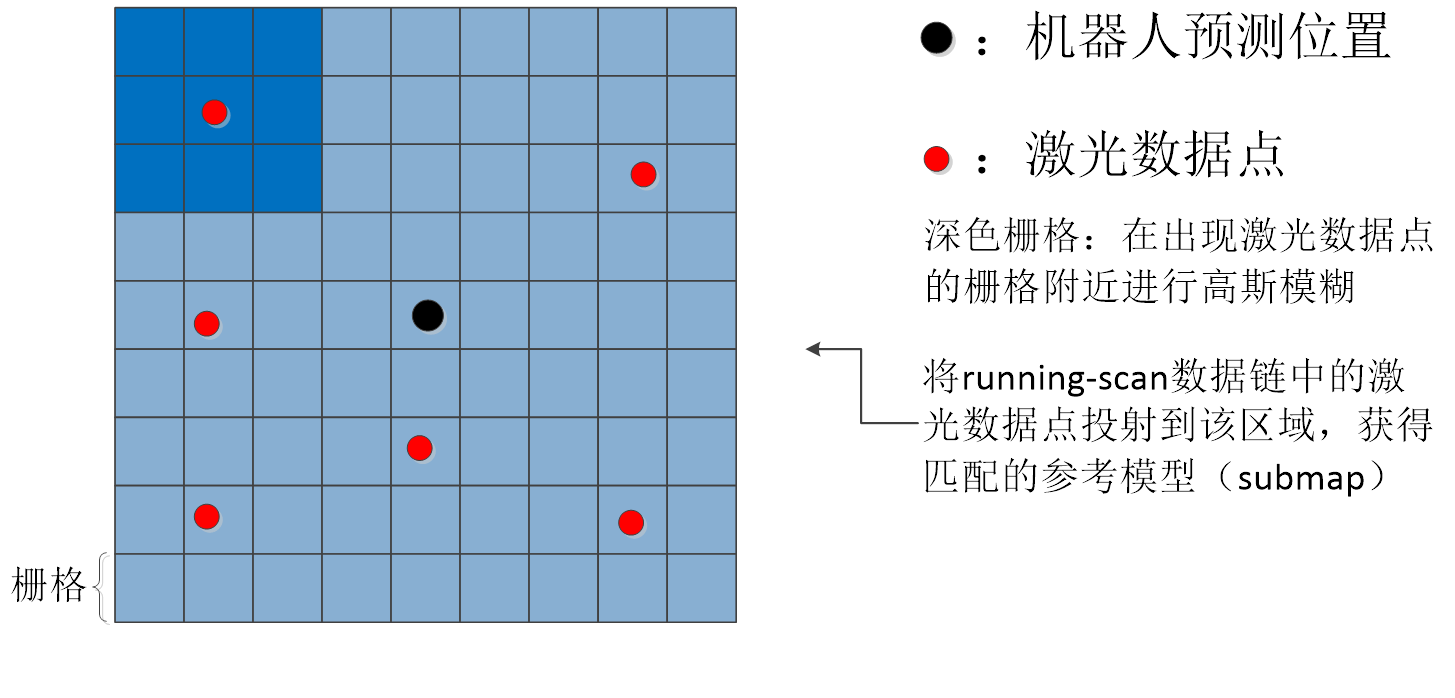
兴趣区域:
匹配的方式是scanTomap,兴趣区域就是矩形形状的submap,也可以将这块区域理解为参考模型。
搜索区域:
以里程计估计的位置为中心的一个矩形区域,用以表示最终位置的可能范围,在匹配时,遍历搜索区域,获取响应值最高的位置。
查找表:
对于激 光 获得的数据信息,以一定的角分辨率和角偏移值进行投影,获取查找表,用以匹配。
Running-scans:
实时维护的局部激光数据链,首末两帧距离在一定距离范围内,且满足一定数据规模,否则需要删除末端数据帧。维护当前局部数据链
生成submap(因为匹配的方式是ScanToMap)
生成查找表:
查找表存在的意义就是相比于暴力匹配,不要每次都重新计算每个激光数据信息,相同角度不同位置的激光数据信息只需要被索引一次
由里程计预测可以得到当前预估的姿态角,真实的姿态角必定在附近;
以一定的分辨率和偏移值对原机器人 坐标系 下(局部坐标系)表示的激光信息进行不同角度的映射,获得一个包含n个角度的查找表。
其中:
查找表->submap(匹配)
移动机器人自身的状态包括(x,y,θ)(x,y,θ),通过查找表的方式有效解决了角度的问题,眼下仍需解决位置的问题,采用离散化搜索区域进行定位,并利用 多分辨率 提高搜索速度
响应值的计算如下描述:将查找表以一定的为宜投到submap上,此时的submap已有running-scans生成,并利用高斯进行模糊,假设总共有n个点被查找表击中,击中的每个点得分不同(高斯模糊的作用),累加得分并除以可以达到的最高得分
查找表->submap(粗匹配->精匹配)
为提高搜索效率,采用多分辨率的方式,即粗匹配时采用较低的分辨率搜索得到候选区域,再对候选区域进行划分得到精确求解。
计算节点均值
在每次匹配过程中(粗匹配和精匹配),选取几个拥有最优响应值的位姿状态,取平均值作为匹配结果。
最优响应值为一个,设立一个10^-6作为容忍度,一旦有其他位姿状态的响应值与最优响应值在容忍度内,即为相等;最终的节点为它们的平均值。
迭代:
粗匹配(获得均值)->(作为初值)精匹配(得到最终均值)
计算节点协方差——位置协方差(粗匹配)
2、添加顶点和边
添加顶点:即关键帧的位姿
添 加 边: 当前帧与前一帧、running-scans、near-chains建立连接。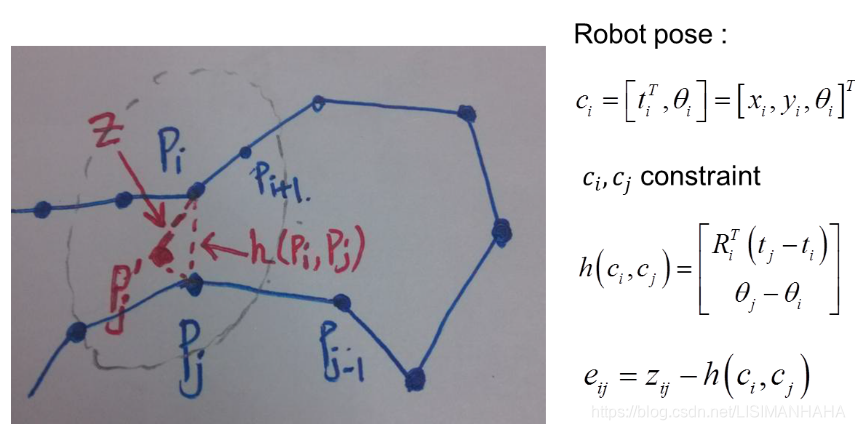
添加边主要经过三个步骤:
1、Link to previsous scan
2、Link to Running scans
RunningScan chain:一定数量且距当前一定距离内的激光数据链。
3、Link to other near chains
NearChain: 以当前节点开始广度优先的方式从graph中遍历相邻的一定距离范围内所有节点,依据当前id从sensorManager中分别递增与递减寻找一定范围内的chain, 生成nearLinkScans.
前两个步骤都好理解,主要是第三个,以当前节点为搜索中心,以一定范围(比如说4m)进行广度搜索,得到了所有关联的节点,然后利用节点生成数据链(数据链需要包含约5个ID连续的关键帧)(不包括当前结点,否则放弃该数据链),用当前节点进行匹配,若响应值达到一定阈值,产生一条边,这条边一端是当前节点,还有一端是数据链中质心距离当前节点质心最近的节点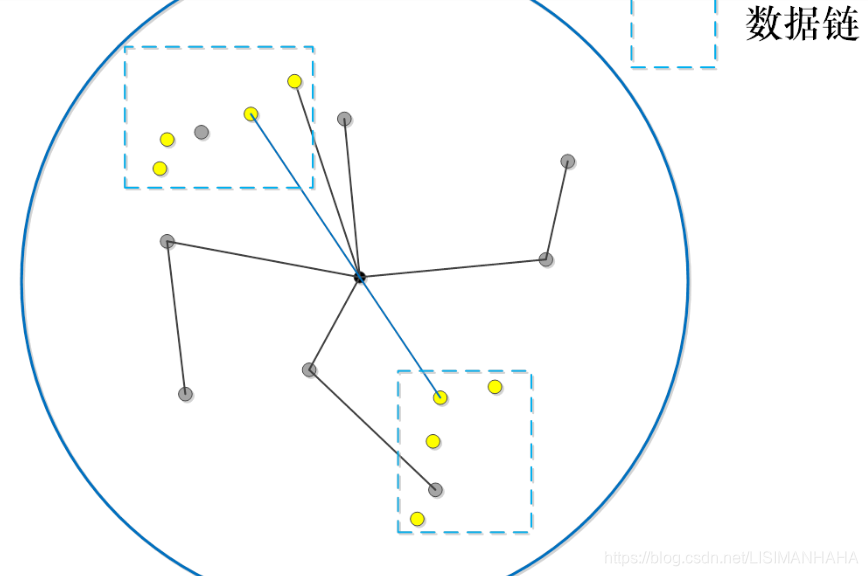
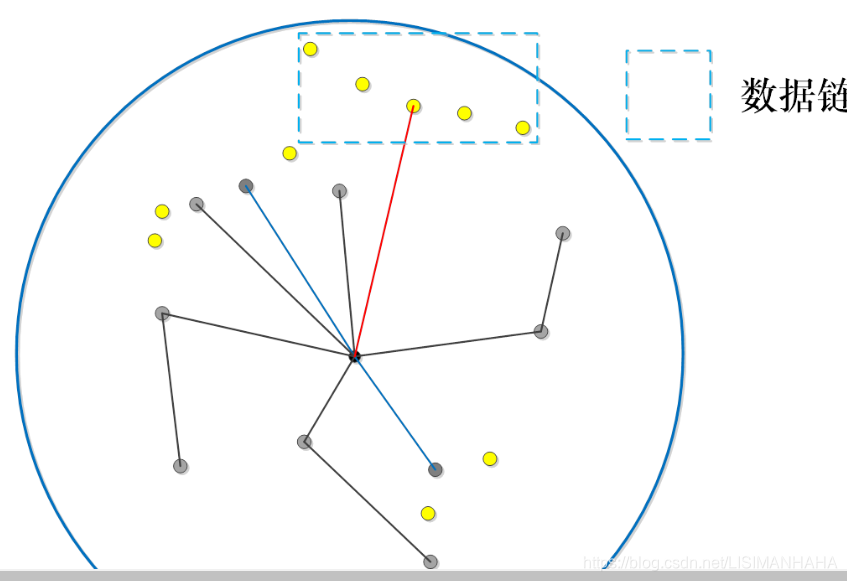
3、回环检测
回环检测的操作和添加邻近边类似,步骤较为繁琐:
1、依据当前的节点, 从Graph中找到与之相邻的所有节点(一定距离范围内)
2、采取广度优先搜索的方式,将相邻(next)与相连(adjacentVertices)添加进nearLinkedScans.
3、从sensorManager中取从前到后,依据id序号挑选与当前在一定距离范围内,且不在nearLinkedScans中的candidateScans, 当数量达到一定size,返回。
4、loopScanMatcher进行scanTomap的匹配,当匹配response 和covariance达到一定要求认为闭环检测到。得到调整的correct pose。
5、 Add link to loop : 调整边(全局闭环)
6、触发correctPose: spa优化
第一步,首先去除那些和当前节点的时间相邻的节点,针对那些在搜索范围内,且在时间点上并不相邻的节点产生一个数据链,然后进行匹配,若响应值大于阈值,添加回环并进行全局优化。
部分参考原文链接:https:// blog .csdn.net/qq_24893115/article/details/52965410
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















