















































软件

产品


摘要
激光雷达是同时定位和建图(SLAM)的重要组成部分之一。然而,现有的激光雷达倾向于将新的扫描数据与先前的固定姿态扫描数据简单地进行迭代匹配,从而逐渐累积误差,此外,捆集调整(BA)作为一种有效的联合优化机制,由于大规模全局地标的稠密计算,不能直接引入实时里程计。因此,这里设计了一个新的策略,名为激光雷达SLAM中捆集调整里程计(LMBAO)的地标地图,以解决这些问题。首先,进一步开发了基于BA的里程计,并采用了主动地标维护策略,以实现更准确的本地配准并避免累积错误。具体而言,本文在地图上保留了整个稳定的地标,而不是仅仅在滑动窗口中保留其特征点,并根据其活动等级删除地标,接下来,减少滑动窗口长度,并执行边缘化以保留窗口外但与地图上的活动地标相对应的扫描数据,从而大大简化了计算并提高了实时性。此外,在三个具有挑战性的数据集上的实验表明,我们的算法在户外驾驶中具有实时性能,并优于最先进的LiDAR SLAM算法,包括LegoLOAM和VLOM。
主要贡献
我们的系统概述如图1所示,该工作通过使用主动地标维护策略将地图与滑动窗口(其长度在LMBAO中固定为4)分离,进一步开发了激光雷达SLAM的BA里程计,地图被分为参与位姿和速度联合优化的滑动窗口部分,以及提供足够先验约束的窗口外的边缘部分。
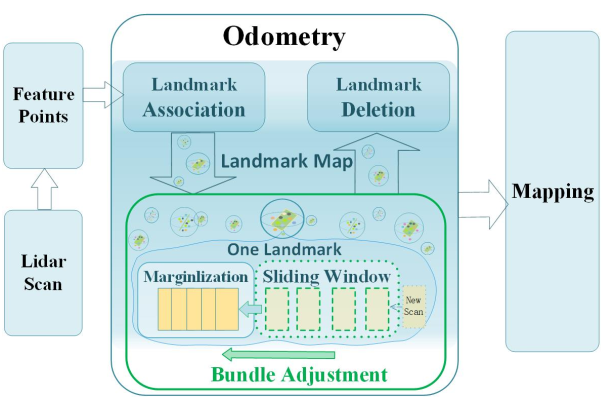
图1 我们的工作提出了一种使用主动地标地图维护(包括地标关联和地标删除)的BA里程计,向BA提供所有扫描的地标数据,并仅优化滑动窗口内扫描数据中的位姿(在绿色框中)
我们工作的主要贡献可以总结如下:
主要内容
A 运动补偿和预测
使用连续运动模型,对特征点进行补偿和预测,以构建地标,存储在地图中的每个地标包含所有点,并形成参与局部BA优化的残差,边缘化用于加快计算速度,如下图2
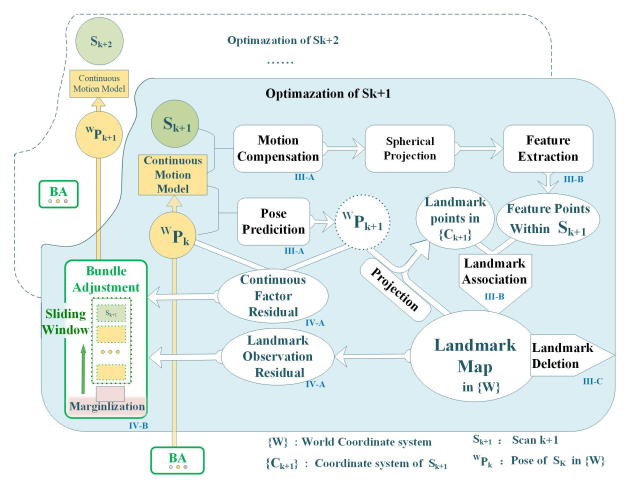
图2 BA里程计过程
B 用特征点构建地标
提取特征点和构建地标的过程与VLOM中使用的方法类似,一旦新的扫描到达,首先从该单次扫描数据中提取特征点,然后将这些特征点跨多个扫描数据进行关联,以构建存储和维护在地图中的全局地标。
C 从地图中删除地标
为了减少计算负担,同时删除地标以限制地图中的点数,与以前方法不同,它们依赖于滑动窗口,一次扫描数据的特征点在滑出窗口时被删除,我们采用了一种更主动的地图维护策略,该策略使用地标活跃度来区分地标,并充分保留活跃地标的特征点。
D 带边缘化的捆集调整里程计
地标观测残差:每个地标都为BA优化贡献了一个观测残差,即LiDAR扫描的全局姿态优化。
连续因子残差:连续运动模型要求LiDAR运动具有一定的平滑度,这在大多数情况下都能满足。
优化:全局地标是多个扫描数据中特征点关联的结果,因此每个界标的位置和生存时间都不同。通过滑动窗口进行优化。
E 激光雷达建图
基于Lego LOAM的建图部分,我们开发了一种建图算法,该算法充分利用里程计步骤中存储的先验信息,为了改进位姿变换,我们匹配地标L使用周围的点云图进行更新,然后,再次使用L-M方法获得最终姿态。
实验
我们进行了一系列实验来验证所提出的框架的有效性,实验在配备AMD Ryzen7 5800H CPU和16GB RAM的笔记本电脑上使用机器人操作系统(ROS)进行,将我们的算法与最先进的LiDAR SLAM算法进行了比较,包括Lego LOAM和VLOM,然后,我们进行了消融实验,以验证LMBAO在里程计中的改进,最后,我们给出了算法的运行时间。在以下实验中,我们在每个数据集上运行所有比较算法5次。绝对平移误差(ATE)的均方根误差(RMSE)用作评估指标。
A、 公共数据集评估
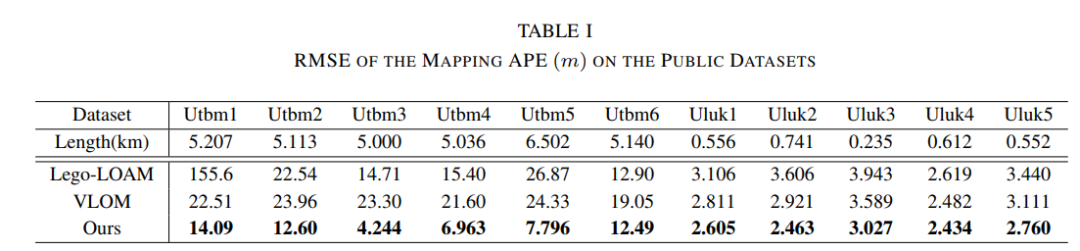
表一与其他方法相比,我们的方法在所有11个序列上都获得了最佳性能。在UTBM数据集的序列1-5中,我们的方法的误差仅为其他两种方法的一半,在ULHK数据集上,序列长度相对较短,因此我们的准确性有所提高,但程度不是特别明显。
在图3中,我们显示了UTBM数据集序列2、3、4和5的轨迹,包括阴天、夜晚、雪和其他条件,Utbm轨迹的起点和终点放大显示,通过我们的算法获得的红色轨迹的终点几乎与起点重合,整个过程更接近真值。
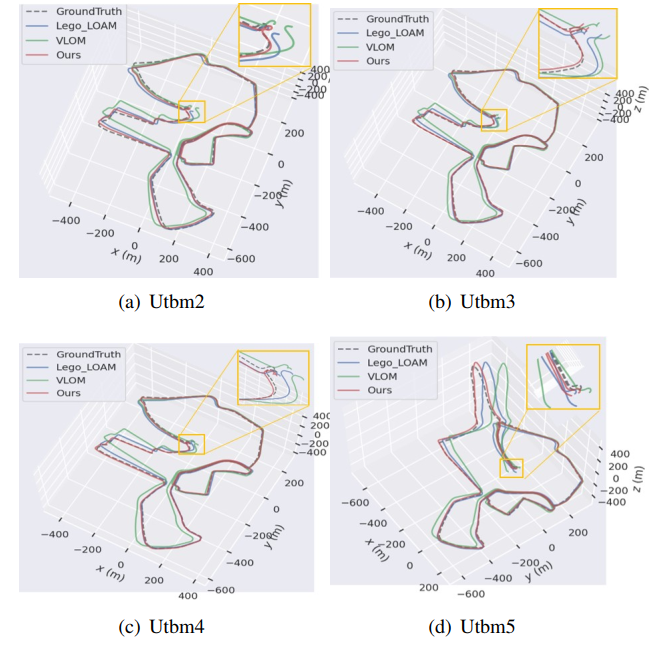
图3 UTBM数据集上的轨迹比较
B、 基于校园数据集的BA里程计评估
为了验证LMBAO在里程测量中的改进,我们使用自己的校园数据集对地标地图维护和边缘化进行了消融实验。
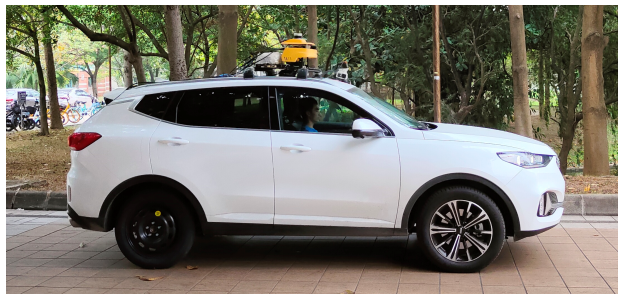
图4 使用的传感器套件
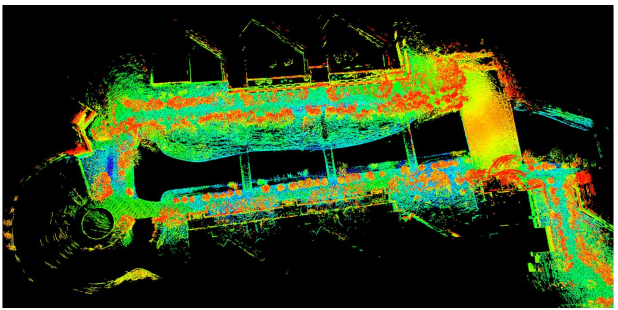
图5,用我们的方法创建的点云图
C 精度评估
在3个校园序列上评估了Lego LOAM,VLOM、LMBAO-LM和LMBAO的里程计模块,里程计ATE的RMSE如表II所示,LMBAO的这三个序列的结果都超过了其他三种方法的结果。
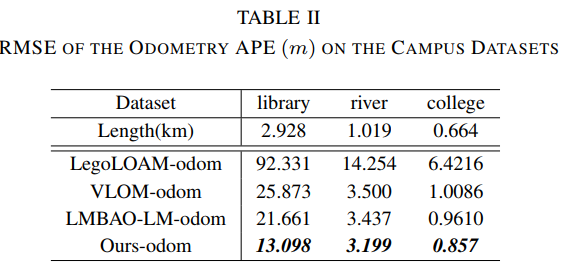
图6展示了图书馆环路的里程轨迹和地标地图,在地标地图中,滑动窗口内的平面和线条为黄色和浅蓝色,外部的边缘部分为紫色和绿色。

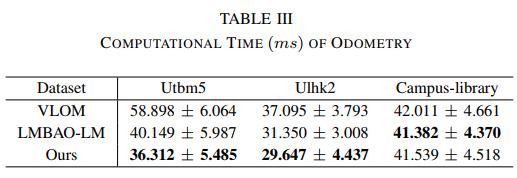
D 运行效率比较
总结
本文提出了一种具有主动地标地图维护(LMBAO)的BA-LiDAR里程计,包括地标关联和地标删除,首先描述了BA地标地图的构建,该地图与滑动窗口分离,以充分利用先验约束,然后,我们在BA里程计中结合界标图进行边缘化,这大大简化了协方差矩阵的计算。与其他SLAM方案相比,我们的方法中的错误地标能够被尽早消除,有利于后续的优化甚至特征提取,这与我们在同一线程中的里程计一起工作。此外,在户外驾驶数据集上的实验表明,LMBAO提高了BA里程计的鲁棒性,在与最先进的LiDAR SLAM算法(包括Lego-LOAM和VLOM)的比较中,LMBAO在精度和效率方面取得了更好的性能。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















