















































软件

产品


Treap = Tree + Heap, 又称树堆, 它在满足二叉搜索树的同时又满足堆的性质。
因为二叉搜索树,根据输入序列不同创建的树也不同,最坏的情况会退化为线性(只有左子树或右子树)。
二叉搜素树的效率和树高成正比,因此在构建二叉搜索树时,尽可能地平衡左右子树,力求期望时间复杂度为 O(logn)。平衡地方法很多, AVL树,splay树,红黑树等,这些调平衡地方法相对复杂。
如果一个二叉搜索树插入结点地顺序是随机的,得到的二叉搜索树大多情况下是平衡的,即使存在一些极端情况,但是这种情况发生的概率很小,因此以随机顺序创建的二叉搜索树,其期望高度是 O(log n) 。可以将输入数据随机打乱,再创建二叉搜索树,但是某些时候我们并不能事前得知所有待插入的结点, Treap 可以有效解决该问题。
树堆也是一种平衡二叉搜索树,它给每个结点附加一个随机数值,使其满足堆的性质,而结点的值又满足二叉搜索树,其基本操作(增删改查)的期望时间复杂度 O(log n)。相对于其他的平衡二叉树, Trap 的特点是实现简单,且能基本实现随机平衡的结构。
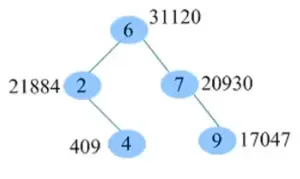
树堆的构建过程中,插入结点时会给每个结点附加一个随机数作为优先级,该优先级满足堆的性质(最大堆或最下堆均可,这里以最大堆为例,根的优先级大于左右孩子),数值满足二叉搜索树性质(中序有序,左子树大于根,右子树小于根)。
例如:输入 6 4 9 7 2构建的树堆,如图所示。
树堆是如何构建的呢? 调平衡:树堆需要两种旋转操作,右旋和左旋。
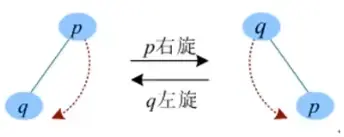
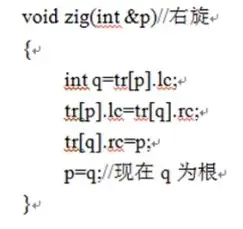
(1)右旋(zig)
结点 p 右旋时,携带自己的右孩子,向右旋转到 q 的右子树位置, q 的右子树被挤掉,此时 p 右旋后左子树正好空闲,将 q 的游资是放在 p 的左子树,旋转后的树根为 q 。
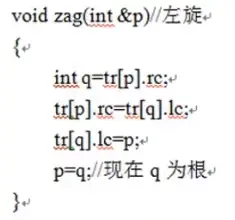
(2)左旋(zag)
结点 p 左旋时,携带自己的孩子,向左旋转到 q 的左子树位置, q 的左子树被挤掉抛弃,此时 p 左旋后右子树正好空闲,将 q 的左子树放在 p 的右子树,旋转后的树根为 q 。
总结:无论是右旋还是左旋,旋转后,总有一个孩子被抛弃,一个指针空闲,正好配对。
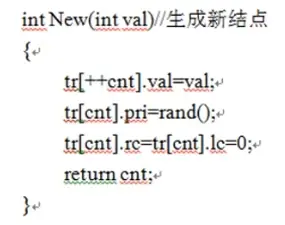
(3)插入
树堆的插入操作,和二叉搜索树一样首先根据有序性找到插入位置,然后创建新结点插入; 创建新结点时,会给该结点附加一个随机数作为优先级,自底向上检查该优先级是否满足堆性质,如果不满足则需要右旋或左旋,使其满足堆性质。
算法步骤:
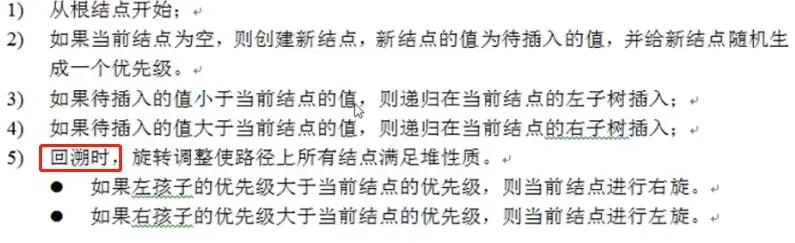

回退操作/回溯:在递归调用的下面,写回退程序。上面代码就是在递归调用结束后,回退时进行旋转操作。
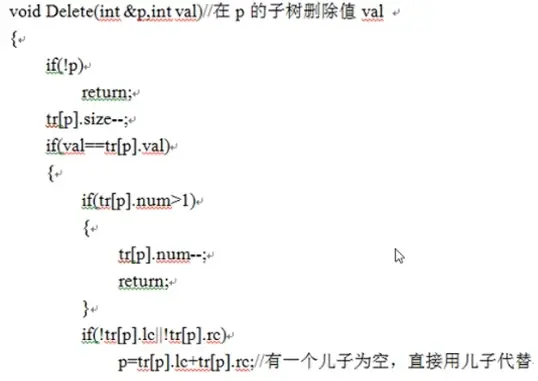
(4)删除
树堆的删除操作非常简单,首先找到待删除的结点,然后将其向优先级大的孩子旋转,一直旋转到叶子,直接删除叶子即可。


性能分析:
由于树堆引入了随机性,构建的树堆是一种平衡二叉树,其查找,插入,删除,求前驱和后继的时间复杂度均为 O(log n)。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















