















































软件

产品


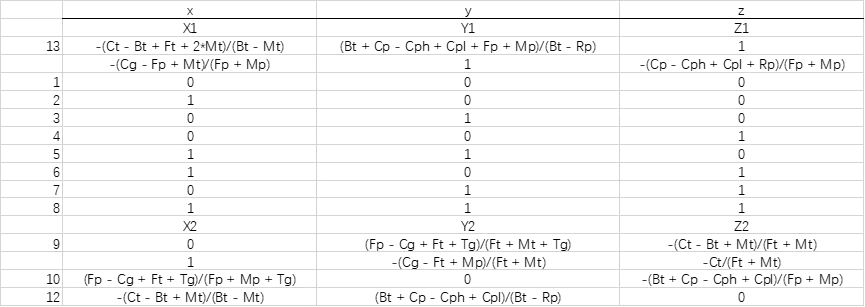
不同于雅克比矩阵的特征值求解,本次均衡点求解的本质是多元方程组的根。
MATLAB程序:
%复制动态方程组求均衡点解
clc,clear;
syms x y z Rp Cph Cpl Cp Bt Fp Mp Ct Ft Mt Cg Tg; %符号变量使用前须定义
[x,y,z] = solve('x*(x-1)*(Cph-Cpl-Cp-Bt-y*(Rp-Bt)-z*(Fp+Mp))=0','y*(y-1)*((1-x)*(Bt-Mt)-(Ft+Mt)*z-Ct)=0','z*(z-1)*(Cg-Fp-Ft-Tg+(Mp+Fp+Tg)*x+(Mt+Ft+Tg)*y-Tg*x*y)=0')

MATLAB运行结果放在表格中显示:

武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















