















































软件

产品


本文将使用OpenCV C++ 进行车道检测。

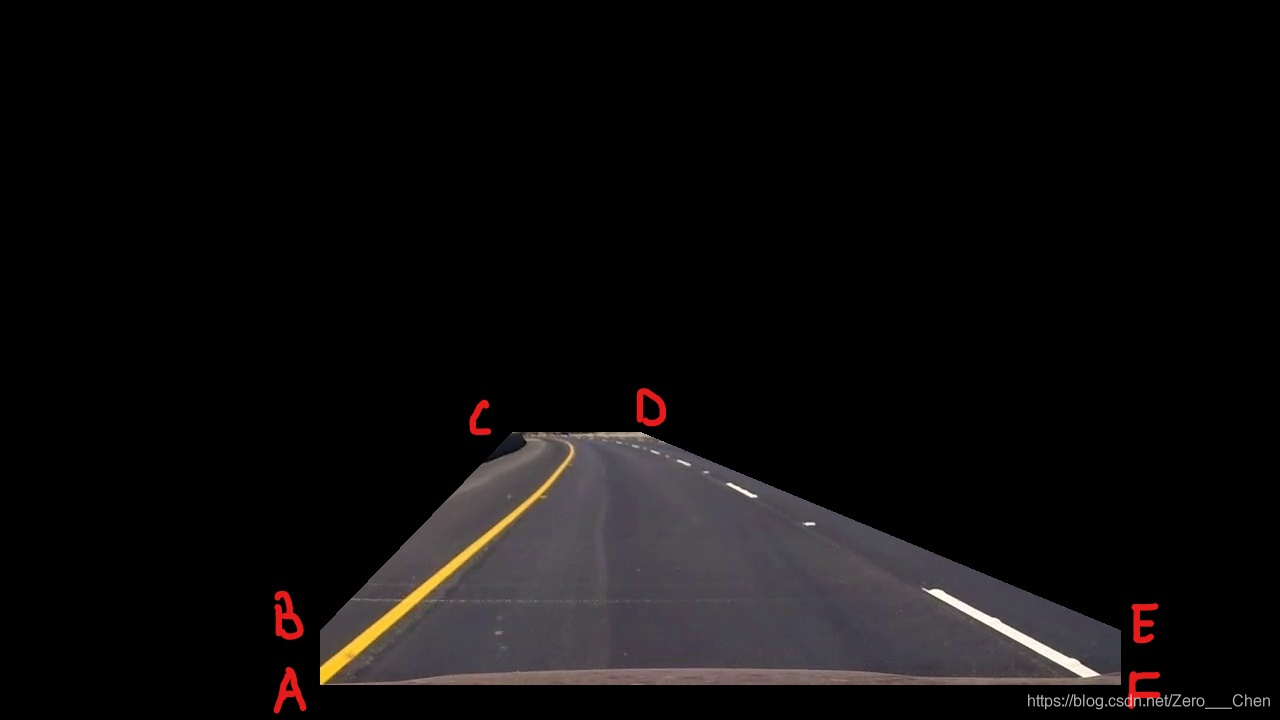
原图如图所示。
使用下面代码段获取ROI区域。该ROI区域点集根据图像特征自己设定。通过fillPoly填充ROI区域,最终通过copyTo在原图中扣出ROI。
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
|
void GetROI(Mat src, Mat &image)
{
Mat mask = Mat::zeros(src.size(), src.type());
int width = src.cols;
int height = src.rows;
//获取车道ROI区域,只对该部分进行处理
vector<Point>pts;
Point ptA((width / 8) * 2, (height / 20) * 19);
Point ptB((width / 8) * 2, (height / 8) * 7);
Point ptC((width / 10) * 4, (height / 5) * 3);
Point ptD((width / 10) * 5, (height / 5) * 3);
Point ptE((width / 8) * 7, (height / 8) * 7);
Point ptF((width / 8) * 7, (height / 20) * 19);
pts = { ptA ,ptB,ptC,ptD,ptE, ptF };
fillPoly(mask, pts, Scalar::all(255));
src.copyTo(image, mask);
}
|
mask图像如图所示。有了mask图像,我们就可以更好的进行后续处理,以检测车道线。
|
1
2
3
4
5
6
|
Mat gray;
cvtColor(image, gray, COLOR_BGR2GRAY);
Mat thresh;
threshold(gray, thresh, 180, 255, THRESH_BINARY);
imshow("thresh", thresh);
|
经过灰度、阈值后的图像如下图所示。
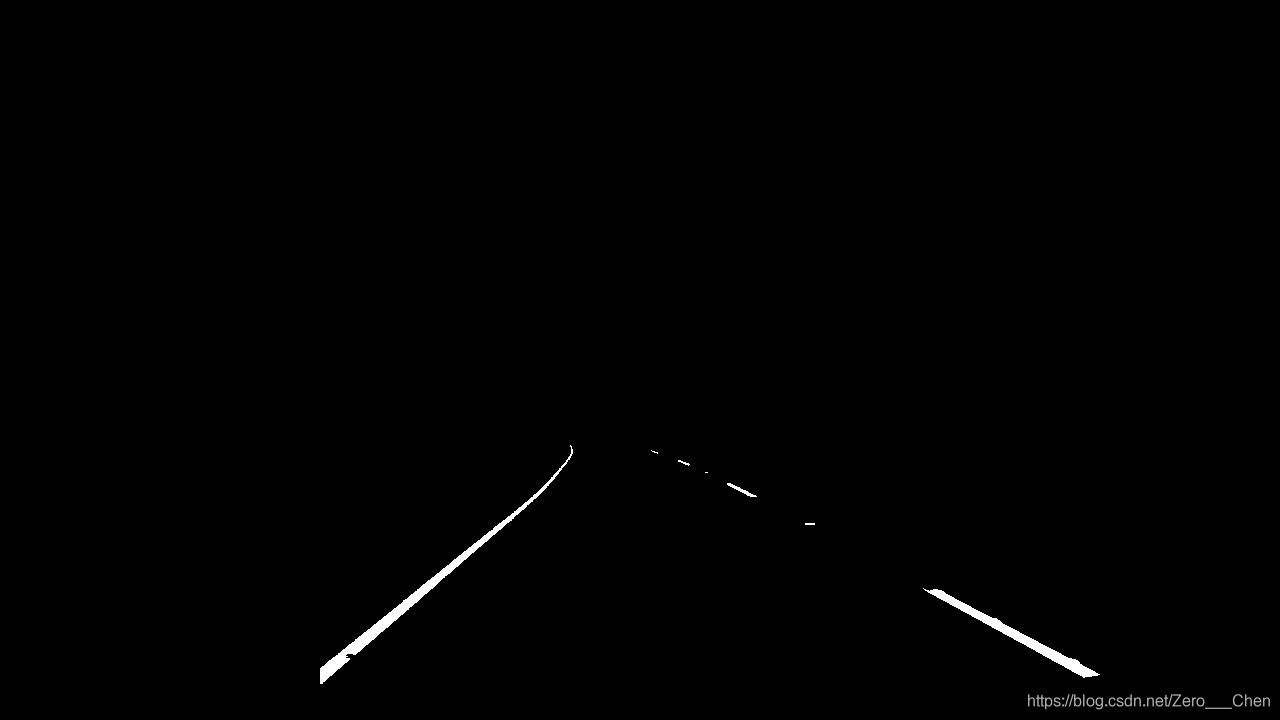
我们将图像分为两半。左半边获取左侧车道轮廓点;右半边获取右侧车道轮廓点。
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
|
vector<Point>left_line;
vector<Point>right_line;
for (int i = 0; i < thresh.cols / 2; i++)
{
for (int j = 0; j < thresh.rows; j++)
{
if (thresh.at<uchar>(j, i) == 255)
{
left_line.push_back(Point(i, j));
}
}
}
for (int i = thresh.cols / 2; i < thresh.cols; i++)
{
for (int j = 0; j < thresh.rows; j++)
{
if (thresh.at<uchar>(j, i) == 255)
{
right_line.push_back(Point(i, j));
}
}
}
|
我们将从left_line、right_line容器中各拿出首尾两个点作为车道线的起始点。
注意:这里要加一个if判断语句,否则当容器为空时(未检测到车道线),容器会溢出。
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
if (left_line.size() > 0 && right_line.size() > 0)
{
Point B_L = (left_line[0]);
Point T_L = (left_line[left_line.size() - 1]);
Point T_R = (right_line[0]);
Point B_R = (right_line[right_line.size() - 1]);
circle(src, B_L, 10, Scalar(0, 0, 255), -1);
circle(src, T_L, 10, Scalar(0, 255, 0), -1);
circle(src, T_R, 10, Scalar(255, 0, 0), -1);
circle(src, B_R, 10, Scalar(0, 255, 255), -1);
line(src, Point(B_L), Point(T_L), Scalar(0, 255, 0), 10);
line(src, Point(T_R), Point(B_R), Scalar(0, 255, 0), 10);
vector<Point>pts;
pts = { B_L ,T_L ,T_R ,B_R };
fillPoly(src, pts, Scalar(133, 230, 238));
}
|
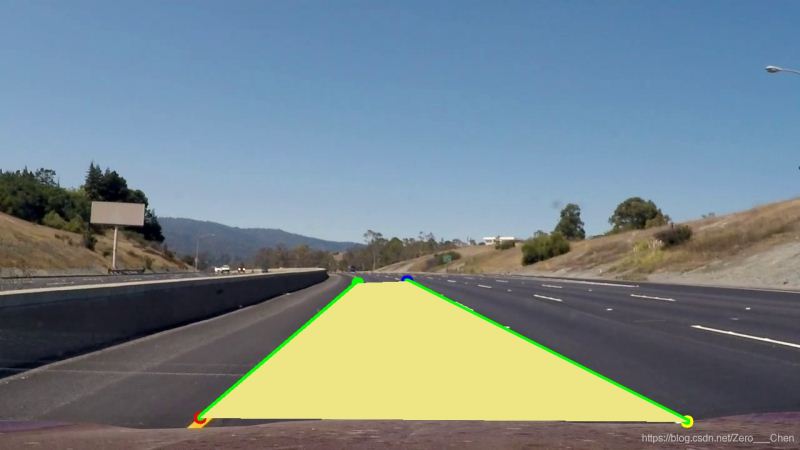
最终效果如图所示。
本文使用OpenCV C++进行车道检测,关键步骤有以下几点。
1、要根据车道所在位置扣出一个ROI区域,这样方便我们后续的阈值操作。
2、根据阈值图像获取左右车道的轮廓点。这里的阈值处理很重要,直接会影响最后的效果。本文做实时视频处理时,也会因为阈值问题导致最后的效果不是特别好。
3、根据获取到的各车道轮廓点拿出首尾Point就可以绘制车道线以及车道区域了。
到此这篇关于C++ OpenCV实战之车道检测的文章就介绍到这了,更多相关C++ OpenCV车道检测内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















