















































软件

产品


一.软件定义汽车
软件定义汽车(software defined vehicles , SDV)具体是指在 模块化和通用化硬件平台 支撑下,以人工智能为核心的软件技术决定整车功能的未来汽车。 软件定义汽车功能的增加与升级可通过 软件的远程部署与更新 来实现,汽车硬件将成为模块化、通用化的平台和资源池,支撑整车软件多样化开发与部署。
二.整车开发模式的转变
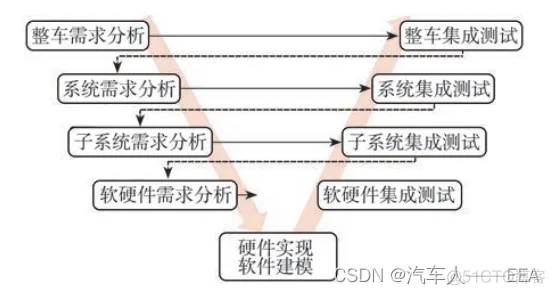
传统汽车整车开发模式是一种 V 型开发模式, V 型左侧涵盖 需求分析 ,右侧对应 模块测试 ,可在软硬件模型完整构建前完成集成测试方 案设计,并有效保证测试方法与对应模块的兼容性, 高效定位测试问题。但传统 V 型开发模式中“ 整车-系统-子系统-软硬件 ”的开发设计顺序局限于 有明确需求导向的整车开发 ,难以适应软件定义汽车功 能快速迭代的需求。
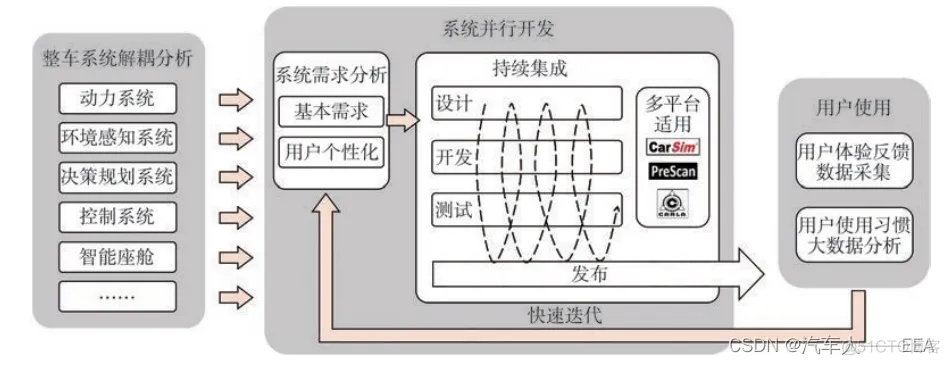
软件定义汽车开发模式中,首先进行 系统解耦分析 ,将整车解耦为子系统进行需求分析,然后进入持续集成开发阶段,按照“ 设计-开发-测试-发布 ”循环往复进行(实现体验持续优化、过程持续优化、价值持续创造 ),持续将软硬件集成至系统主干上,最终完成发布。在持续集成开发阶段,各类开发工平台如 CarSim 、 PreScan 、 CARLA 等的适用性可使整车开发效率大大提升。 整车投入使用后,根据用户反馈情况进行快速 迭代,再次遍历“ 系统需求分析-持续集成 ”的流程并 通过 OTA 技术完成功能发布。
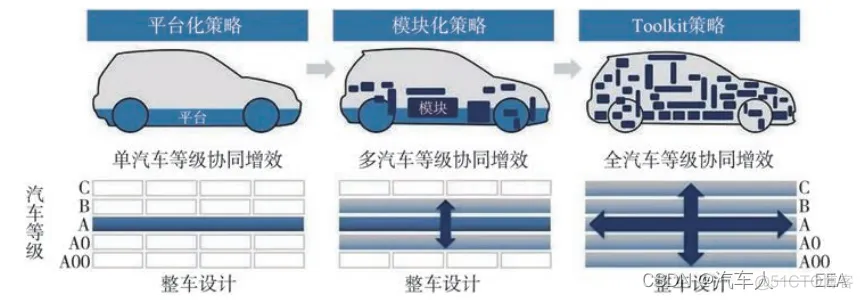
软硬件开发解耦: 硬件开发向架构化、模块化、工具箱策略趋势发展。
1)平台化的概念侧重于物理上的共用零件;
2)架构化的概念侧重于设计过 程上的同方法和制造过程中的模块化;
3)工具箱策略是指不论车辆尺寸和性能,各种车型都可以通过已有整车开发工具箱内的模块集成拼装组成。
用户需求导向的定制化开发:
软件定义汽车将从单一交通工具转变为用户的第三生活空间,整车开发将更加注重用户需求,以用户需求为导向。
三.技术体系
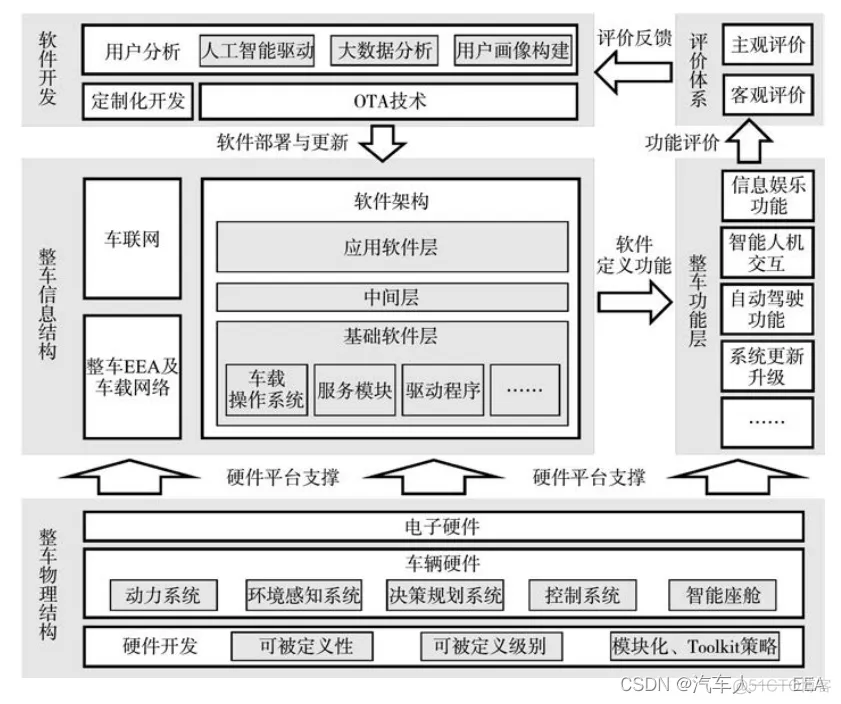
1)整车软硬件的解耦性
软硬件在结构及开发层面实现了解耦,从而解放软件,提升软件开发效率。
2)整车物理结构的通用支撑性
整车物理结构成为模块化、通用化的平台和资源池,具备支撑整车软件多样化开发与部署的能力。
3)整车电子电气架构和车载网络、软件架构升级
A.基于域控制器的集中式电子电气架构
B.基于车载以太网的车载网络
处理计算能力、网络带宽的需求,实现高算力,支撑软件应用持续升级,并增强与云端配合的分布式计算能力。
4)整车软件的可远程迭代升级性
软件可通过OTA 等技术实现远程迭代升级,从而改变产品使用模式以及整车开发模式,使汽车具有全周期生命力。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















