















































软件

产品


1.算法描述
SIFT采用的是DoG图像,而SURF采用的是Hessian矩阵(SURF算法核心)行列式近似值图像。在数学中,Hessian矩阵是一个自变量为向量的实值函数的二阶偏导数组成的方块矩阵,即每一个像素点都可以求出一个2x2的Hessian矩阵,可计算出其行列式detH,可以利用行列式取值正负来判别该点是或不是极值点来将所有点分类。在SURF算法中,选用二阶标准高斯函数作为滤波器,通过特定核间的卷积计算二阶偏导数,从而计算出Hessian矩阵,但是由于特征点需要具备尺度无关性,所以在进行Hessian矩阵构造前,需要对其进行高斯滤波(由于高斯核服从正态分布,所以为了提高运算速度,SURF采用了盒式滤波器近似代替高斯滤波器提高运算速度),即与以方差为自变量的高斯函数的二阶导数进行卷积。通过这种方法可以为图像中每个像素计算出其H的行列式的决定值,并用这个值来判别特征点。
黑塞矩阵(Hessian Matrix)是一个多元函数的二阶偏导数构成的方阵,描述了函数的局部曲率。由德国数学家Ludwin Otto Hessian于19
世纪提出。
surf构造的金字塔图像与sift有很大不同,Sift采用的是DOG图像,而surf采用的是Hessian矩阵行列式近似值图像。
Hessian矩阵是Surf算法的核心,构建Hessian矩阵的目的是为了生成图像稳定的边缘点(突变点),为下文的特征提取做好基础。
每一个像素点都可以求出一个Hessian矩阵。

Hessian矩阵的判别式为:
当Hessian矩阵的判别式取得局部极大值时,判定当前点是比周围邻域内其他点更亮或更暗的点,由此来定位关键点的位置。
在SURF算法中,图像像素l(x,y)即为函数值f(x,y)。但是由于我们的特征点需要具备尺度无关性,所以在进行Hessian矩阵构造前,
需要对其进行高斯滤波,选用二阶标准高斯函数作为滤波器。
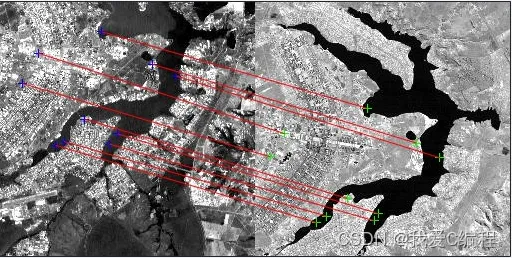
与Sift特征点匹配类似,Surf也是通过计算两个特征点间的欧式距离来确定匹配度,欧氏距离越短,代表两个特征点的匹配度越好。
不同的是Surf还加入了Hessian矩阵迹的判断,如果两个特征点的矩阵迹正负号相同,代表这两个特征具有相同方向上的对比度变化,
如果不同,说明这两个特征点的对比度变化方向是相反的,即使欧氏距离为0,也直接予以排除。
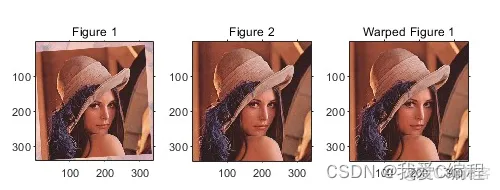
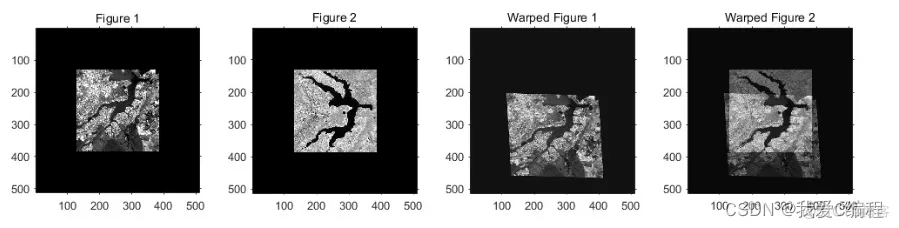
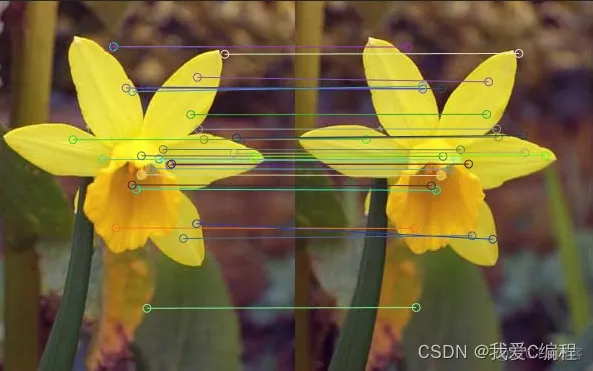
2.仿真效果预览
matlab2022a仿真结果如下:

3.MATLAB核心程序
clear;
close all;
warning off;
addpath(genpath(pwd));
I1=imread('TestImages/testc1.png');
I2=imread('TestImages/testc2.png');
% Get the Key Points
Options.upright=true;
Options.tresh=0.0001;
Ipts1=OpenSurf(I1,Options);
Ipts2=OpenSurf(I2,Options);
% Put the landmark descriptors in a matrix
D1 = reshape([Ipts1.descriptor],64,[]);
D2 = reshape([Ipts2.descriptor],64,[]);
% Find the best matches
err=zeros(1,length(Ipts1));
cor1=1:length(Ipts1);
cor2=zeros(1,length(Ipts1));
for i=1:length(Ipts1),
distance=sum((D2-repmat(D1(:,i),[1 length(Ipts2)])).^2,1);
[err(i),cor2(i)]=min(distance);
end
% Sort matches on vector distance
[err, ind]=sort(err);
cor1=cor1(ind);
cor2=cor2(ind);
% Show both images
I = zeros([size(I1,1) size(I1,2)*2 size(I1,3)]);
I(:,1:size(I1,2),:)=I1; I(:,size(I1,2)+1:size(I1,2)+size(I2,2),:)=I2;
figure, imshow(I/255); hold on;
A106
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















