















































软件

产品


内容说明
车辆的行驶平顺性、行车安全性、乘坐舒适性以及操纵稳定性等性能的好坏与车辆悬架系统性能的优劣息息相关。车辆座椅悬架作为直接与人体接触的振动部件,其主要任务是承载人体重量,缓和路面激励传递给人的冲击以及减弱由此冲击最终带给人体的振动。座椅直接与人体相接触,人体的乘坐舒适性直接取决于座椅悬架减振性能的好坏程度,尤其是驾驶员座椅悬架性能差会造成驾驶疲劳,驾驶疲劳常导致交通事故,因此,汽车主动座椅悬架系统一直是近年来的研究热点。
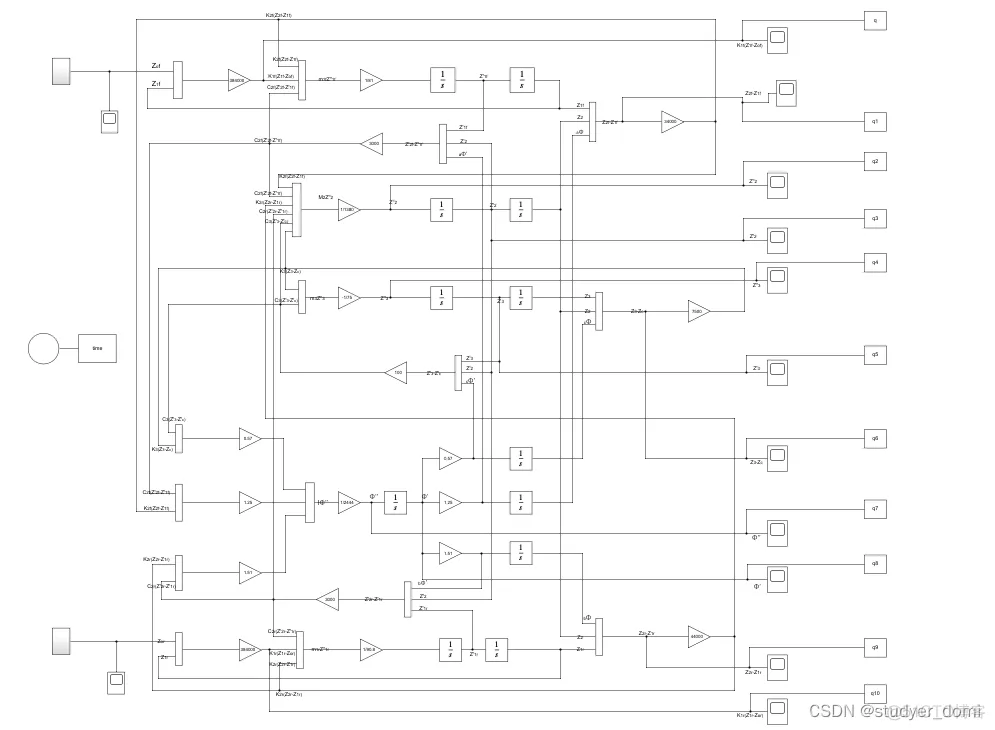
本文首先介绍了论文研究背景及意义、座椅悬架的研究现状,根据国内外相关研究,提出了论文的主要研究内容;总结了乘坐舒适性的要求和评价方法以及平顺性的评价指标,建立了随机路面输入模型,并构建了随机路面输入仿真模块,简化了座椅悬架系统,建立了1/2车五自由度被动座椅悬架系统和主动座椅悬架系统的数学模型,并列出了相应的动力学微分方程。
然后,通过研究控制策略,最终选取PID控制和模糊PID控制作为座椅悬架的主动控制方法,并设计了以座椅实际速度和理想速度差为输入的PID控制器、模糊PID控制器,且在Simulink环境下搭建了仿真模块,并进行了仿真分析。
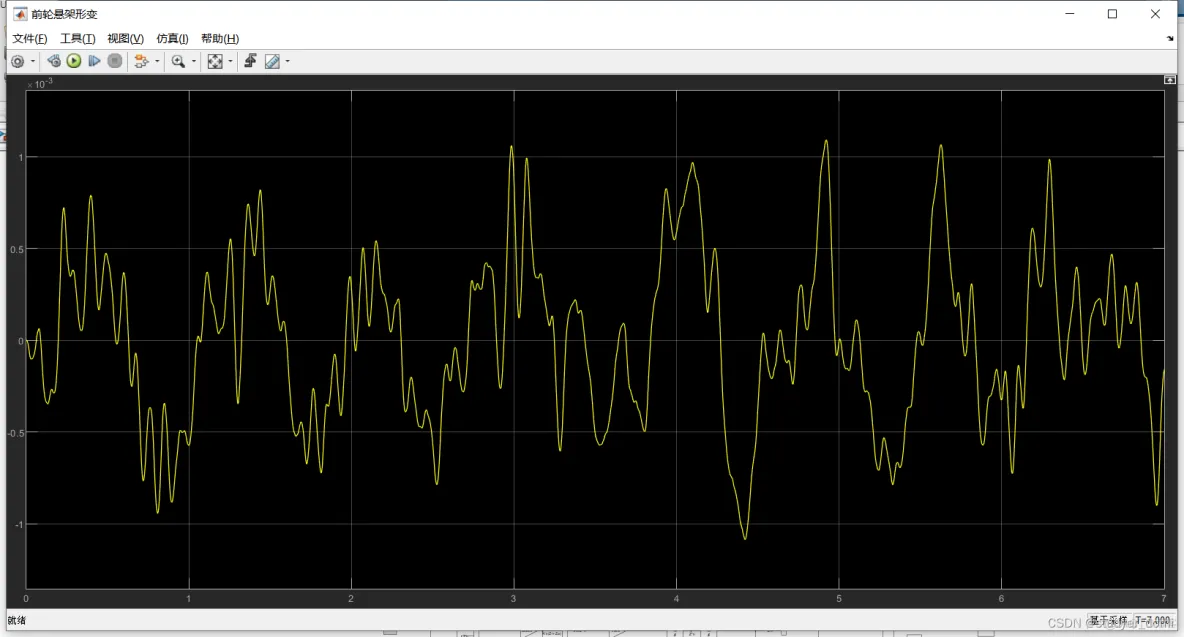
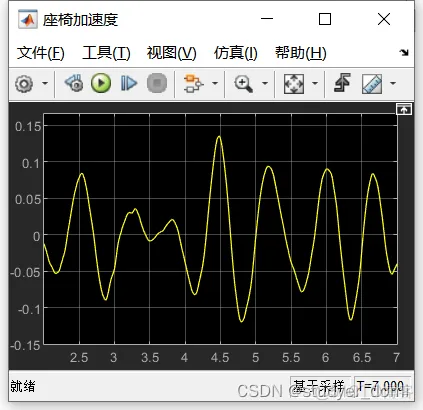
仿真结果表明,座椅悬架系统采用主动控制后,大幅度改善了座椅质心垂向振动,有效地减少了不平路面带给驾驶员的振动,同时也不同程度地改善了车身垂向、俯仰、轮胎动载荷和悬架动挠度等性能指标,保证了车辆平顺性,从而提高了车辆驾驶员的乘坐舒适性,改善了车辆的整体性能。
关键词:座椅悬架;控制策略;乘坐舒适性;模糊PID控制;仿真
仿真分析
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















