















































软件

产品


自动驾驶技术的出现和发展正在改变着我们未来的出行方式,不久的将来智能网联车辆将与传统车辆共享我们的道路路网,CoExist项目的设立正是为转型阶段的城市做好前期准备。
该项目是由欧盟的地平线2020专案资助,由来自7个国家的15个合作方组成,并于2020年年底结束,PTV Group作为有着40年交通仿真经验的专业软件公司,主要负责宏观及微观模型中“自动驾驶车辆”的建模工作,将自动驾驶车辆融入现有的交通模型工具中。 在过去的18个月里,PTV工程师与来自法国研究机构VEDECOM,Renault,西门子TASS以及斯图加特大学的合作伙伴保持紧密的合作关系,此外,还得到瑞典国家道路和交通研究院,荷兰海尔蒙德市一级佛罗伦萨大学的支持。 下图是项目的工作流程: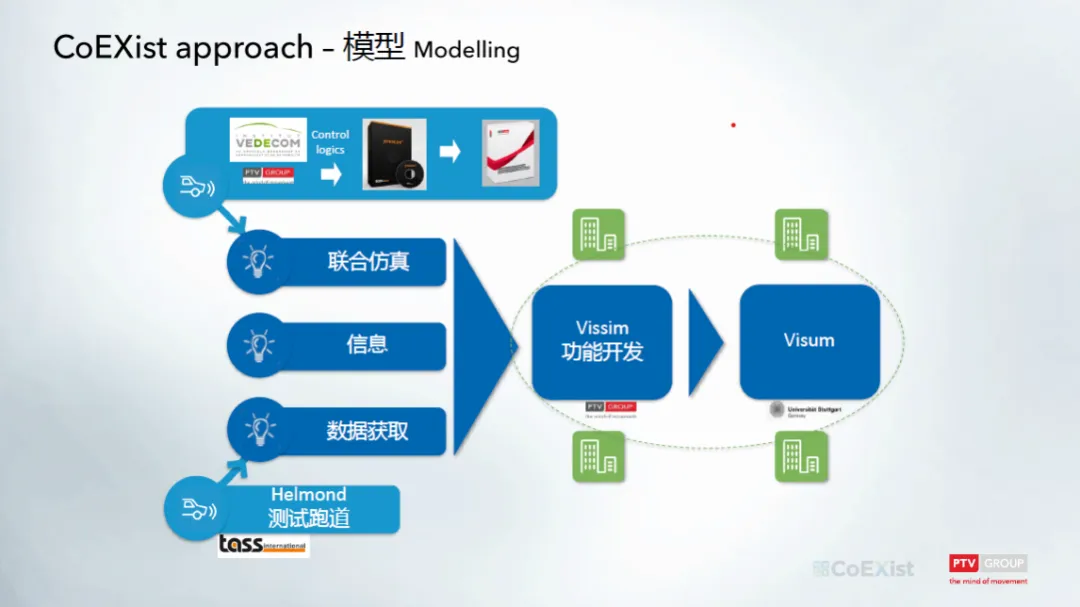
所谓的“联合仿真”是一个在VEDECOM控制逻辑,西门子的Prescan软件和微观仿真软件PTV Vissim之间实现的对接运行。其中的场地数据是在海尔蒙德市的测试道路上并结合实际交通环境下采集得到,并进一步分析数据和自动驾驶的跟车行为特性。
在此基础上,PTV公司在Vissim软件中建立了微观交通模型,包括路段,上下匝道等,并将结果提交给斯图加特大学的研究人员,用于Visum宏观模型的建立(例如流量延误函数)。 CoExist项目中第一个需要解决的问题是,自动驾驶车辆与传统车辆在驾驶行为上具有哪些不同的特征?为了获取可用的研究数据,我们采集了海尔蒙德和埃因霍温测试跑道上得到的经验数据,测试中我们使用了三辆车辆,一辆为传统的驾驶员车辆,两辆为可通讯的自动驾驶车辆。并且,我们在不同的跟车空挡,车速,通讯条件下进行了多种方案的测试对比。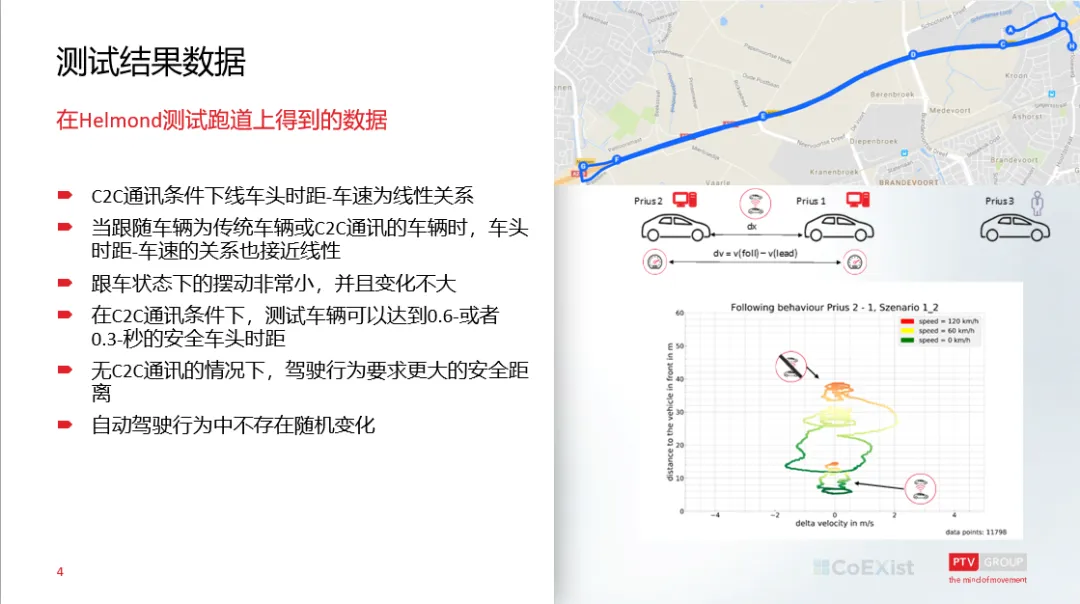
此外,在CoExist项目中,还对自动驾驶车辆的发展阶段和类型进行了明确的定义。首先,根据自动车辆的市场份额,技术能力以及驾驶行为方式将自动驾驶的发展阶段分为了引入阶段,成立阶段以及成熟普及阶段。
同时,又将自动驾驶车辆的驾驶行为方式根据驾驶逻辑的精细程度进行了细分,分别为Rail-safe, Cautious, Normal以及All-knowing,其具体定义为:
根据项目的数据分析结果以及驾驶逻辑划分方式,我们可以看到,自动驾驶车辆与传统车辆的行为特性有着较大的不同,为了使用PTV Vissim软件实现智能车辆的仿真任务,PTV公司在软件的原有基础上,开发了与智能车辆驾驶特性相关的新功能,其中包括:
1. 关闭潜在的随机性
我们知道,传统的有人类驾驶员控制的车辆中包含了很多随机因素,这些随机因素主要反映在车辆在跟车时车速的保持和距离的保持上的摆动较大,而自动驾驶车辆在跟车时的稳定性更高,因此,Vissim新版本中允许用户关闭潜在的随机性算法。
2. 可观察到的前方的车辆数/对象数
自动驾驶车辆由于受到传感器或检测器的限制,往往只能识别到前方一辆车(或两辆车)的情况,但是同时又能接收到下游信号灯的信号数据。针对这种特性,Vissim中将车辆可观察的前方车辆和对象数进行的区别考虑,对象指的是信号灯,停车标识等物理对象。
3. 根据前车的车辆类型确定跟车行为参数。
在原有的Vissim软件中,只能定义一种跟车行为参数,但是当路网中同时存在自动驾驶车辆和传统车辆时,且当不同的车辆互相跟车行驶时,跟车所采取的驾驶行为也会有很大的区别,举个简单的例子来说,当互相通讯的自动驾驶车辆相互跟车时,其保持的前后车距肯定大大小于两辆传统车辆的跟车距离。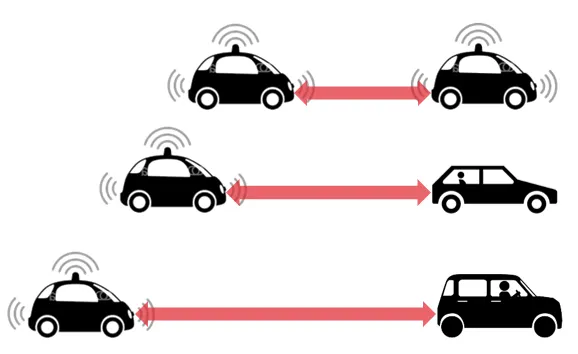
4. 车辆自动编队功能
自动形成车队是智能车辆的一个特有性能,因此Vissim根据车队形成的各种前提条件,将满足车辆类型和驾驶行为的车辆在路网中相遇时能够自动形成车队,保持稳定行驶的状态,这一新功能的实现使得Vissim的用户可以简单的在软件中直接实现智能互联车辆自动编队行驶的运行效果。
5. 自动驾驶车辆的默认参数定义
根据CoExist项目中定义的自动驾驶车辆的四种驾驶逻辑,以及在测试场地上实测得到的数据,Vissim软件中新增了适用于自动驾驶车辆的驾驶行为参数,用户可以直接采用定义好的默认参数值,也可以根据自己的实测数据在默认参数的基础上进行参数调整,这一推荐值对于自动驾驶的研究者来说是很好的建模基础。
通过以上对微观仿真软件Vissim的改进,这个建模工具以及为自动驾驶车辆做好了准备,四大参与CoExist项目的道路研究机构将会使用PTV Vissim微观软件和PTV Visum宏观软件模拟他们的应用场景,以上也是CoExist项目的三大任务之一。
现在,项目组将着手致力于道路基础设施和迈入自动驾驶时代的准备工作,来增强地方政府和其他出行利益相关方的应对能力,迎接一个服务于未来共享出行的城市转型。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















