















































软件

产品


转子动力学在确定临界速度和最终设计能够承受极端振动的转动结构中扮演重要的地位。本案例演示了使用Nelson-Vaugh转子模型的转子动力学分析应用。使用3D实体模型的2D轴对称代表模型来做转子动力学分析。2D轴对称模型的分析结果与全3D模型的结果进行对比。
主要演示了下列概念和技术:
• 3D几何体的轴谐网格
• 圆盘和轴承建模
• 旋转结构中的陀螺效应及模态分析
• 坎贝尔表分析
• 临界速度的确定
• 非平衡响应分析
• 轨道绘制
• 2D轴对称模型的性能好处
介绍
旋转机械(如蒸汽或燃气轮机、涡轮发电机、内燃机、电机和磁盘驱动器)会产生惯性效应,可以对其进行分析,以改进设计并降低故障的可能性。旋转设备设计的当前趋势聚焦在提高速度,这增加了由振动引起的操作问题。在较高转速下,旋转部件的惯性效应必须一致地表示出来,以准确预测转子行为。
旋转结构中的惯性效应通常是由振动转子旋转时的精确运动引入的陀螺力矩引起的。随着旋转速度的增加,作用在转子上的陀螺力矩变得至关重要。在设计层面不考虑的惯性效应可能导致轴承和支撑结构损坏。为了理解振动转子的稳定性,考虑轴承刚度、支撑结构柔性和阻尼特性也很重要。
在接下来的章节中,将详细介绍旋转结构的建模细节和分析过程。通常情况下,从CAD获得的3-D模型可直接用于分析;然而,3-D模型会产生大量的节点和元素模型。该示例演示了如何从三维模型中提取平面二维模型,该模型可以使用更少的节点和元素进行分析。比较了二维和三维模型分析的易用性、准确性和性能。
模型描述
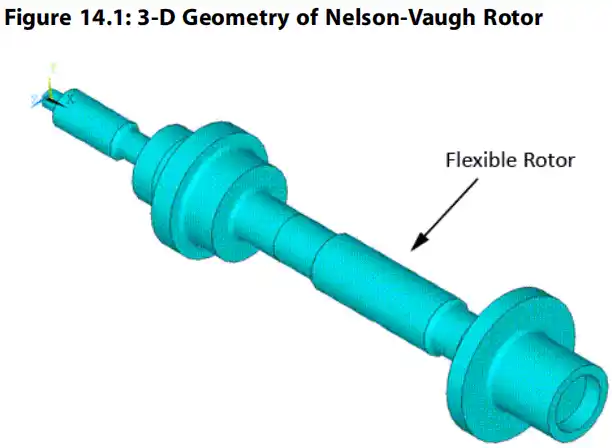
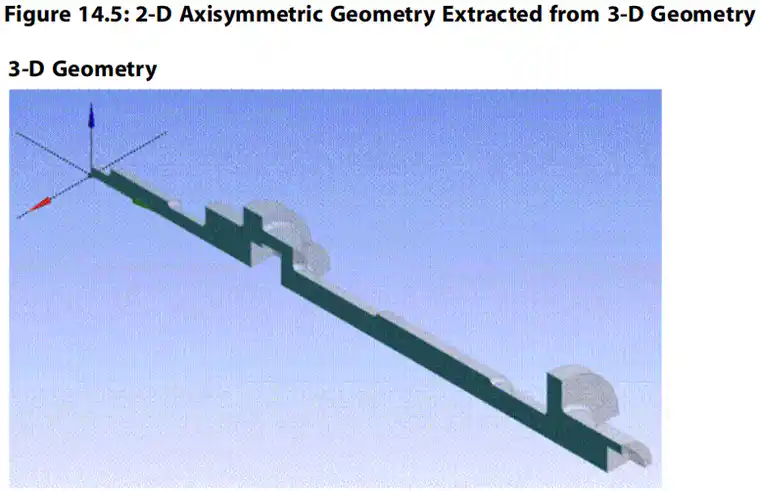
该问题的模型是Nelson Vaugh转子的三维几何模型,如下图所示。该模型由一个柔性转子和两个正交异性轴承支撑的一个刚性圆盘组成。原始模型的建模细节可参见参考文献1。
在下图所示的二维轴对称模型上进行模态、坎贝尔图和不平衡响应分析。在每次分析中都观察到陀螺力矩对旋转结构动力学的影响。
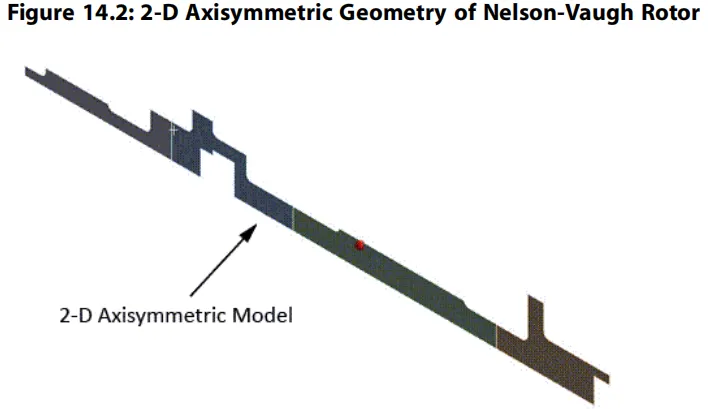
为了验证二维轴对称模型获得的结果的准确性,对相应的三维实体模型进行了相同的分析。然后将结果用作二维轴对称模型结果的基准。
建模
柔性转子部件的3D建模
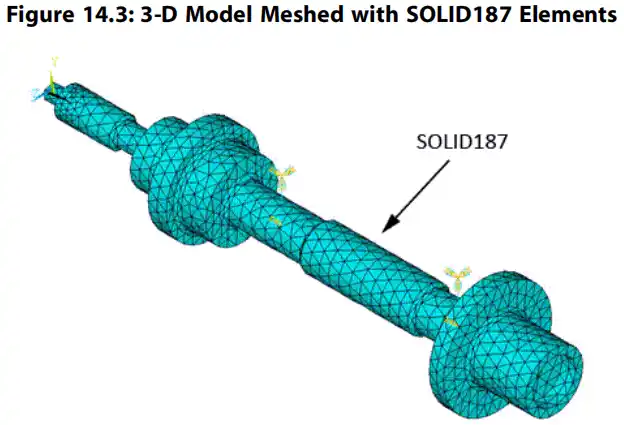
3D模型由SOLID187单元划分网格,如下图,使用SOLID187单元的默认设置。
从三维几何进行柔性转子部件的轴对称建模
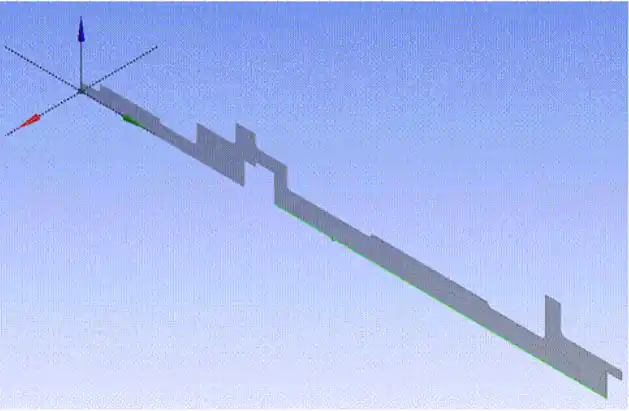
下列过程使用ANSYS Workbench从3D几何中提取2D轴对称几何:
1. 冰冻下列模型的高亮部分
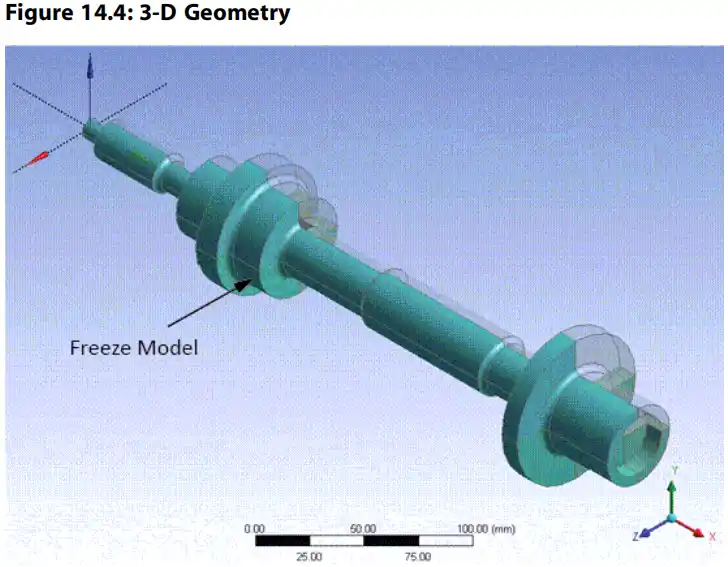
2. 对模型的未冻结部分使用“按平面剖切”操作,如下所示
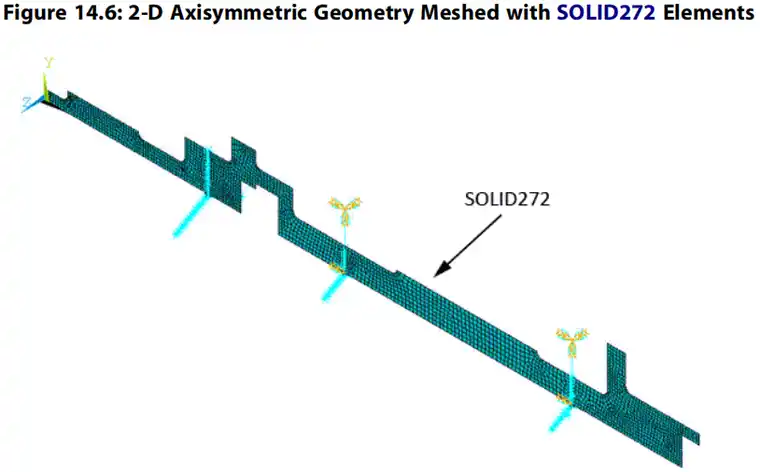
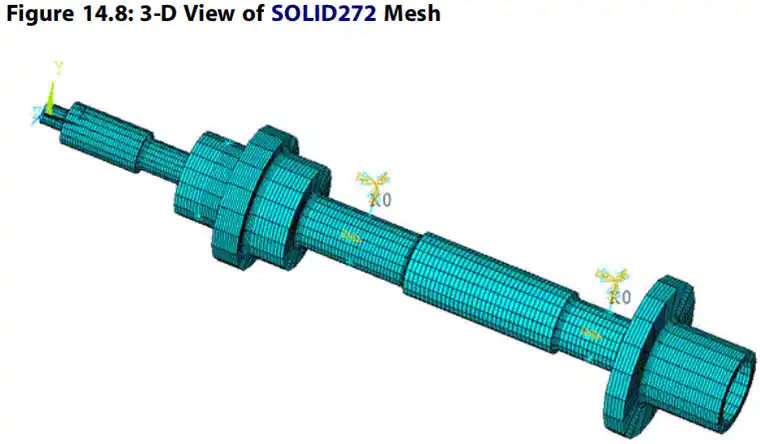
然后,将提取的二维几何图形用一般轴对称SOLID272单元进行网格划分,与下图所示。
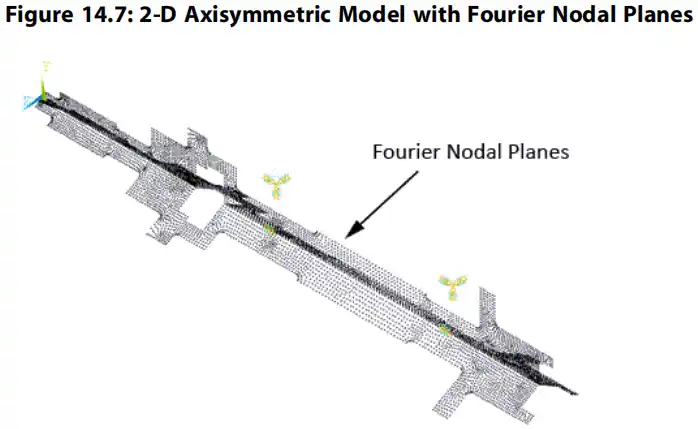
为了建模,考虑了沿环向方向的三个傅里叶节点平面,KEYOPT(2)=3,如下图所示。
使用转子模型的对称轴,基于主平面的二维网格生成三维网格。它使用SECTYPE和SECDATA命令定义如下:

最后,使用对称轴和NAXIS命令,将自动生成三维网格,如下图所示。
圆盘和轴承建模
圆盘建模
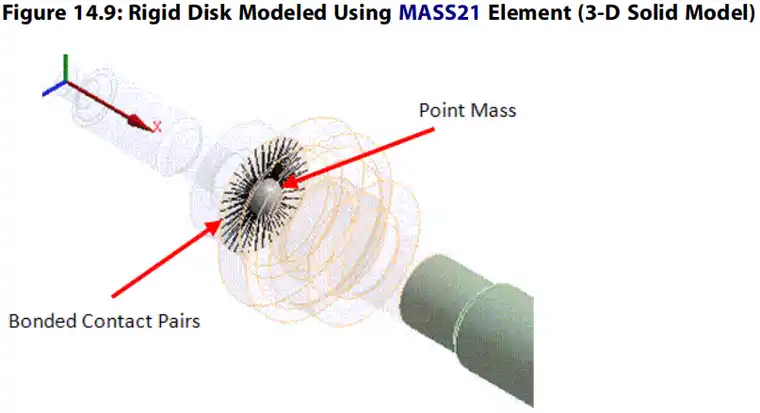
使用MASS21单元将刚性圆盘建模为集中质量,如下图所示。KEYOPT(3)=0用于定义具有旋转惯性的三维质量。
以下是刚性盘建模的一般过程:
1. 在与刚性盘位置相对应的界面处创建接触对(几何体在此位置预先切片)。
2. 用CONTA174单元对三维实体模型的接触面进行网格划分,用CONTA175单元对二维轴对称模型的接触表面进行网格划分。
3. 定义曲面上的引导点
4. 在该引导点上创建节点质量
在三维实体模型中,粘接的面-面接触对用于定义横截面单元和引导点之间的接触。引导点位于横截面的中心。如上图所示,使用CONTA174单元(3-D 8节点面-面接触)对横截面单元和/或接触表面进行网格划分。
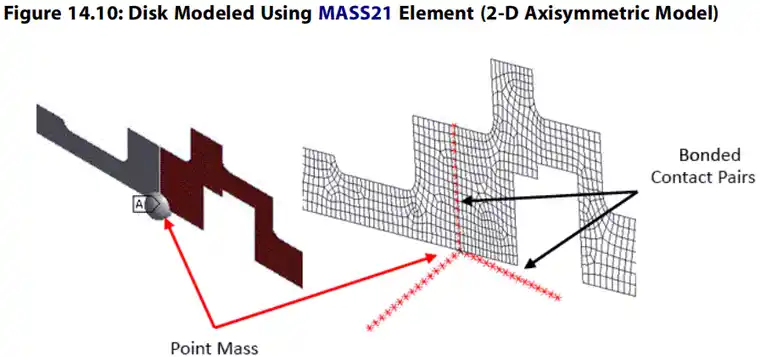
类似地,对于二维轴对称模型,粘接的点-面接触对用于定义横截面单元和引导点之间的接触。引导点位于横截面的中心。如下图所示,使用CONTA174单元(3-D 8节点点-面接触)对横截面节点和/或接触表面进行网格划分。
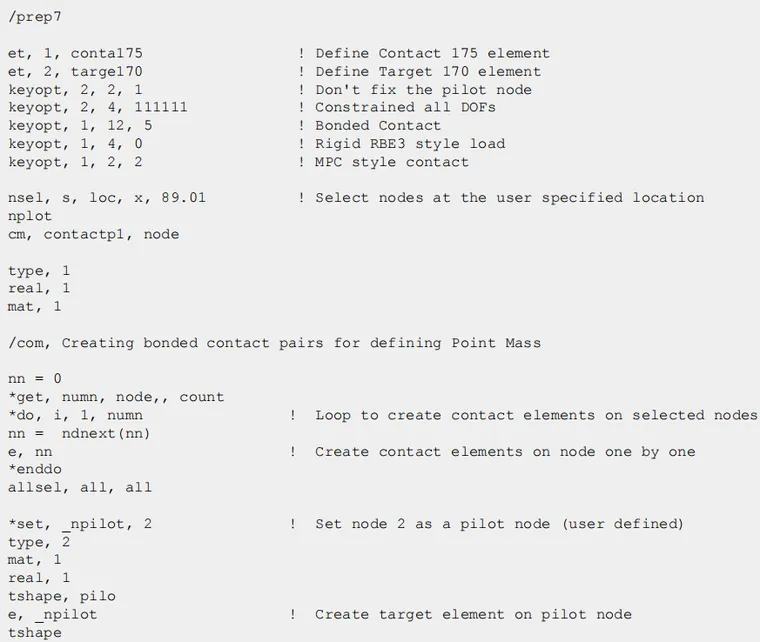
当对两个接触对进行建模时,多点约束(MPC)算法用于KEYOPT(2)=2的粘接接触。
TARGE170单元用于对两个模型中的引导点进行网格划分。该引导点的所有自由度(DOF)通过KEYOPT(4)=111111来约束。
以下输入片段显示了为二维轴对称模型创建接触对所涉及的步骤:
轴承建模
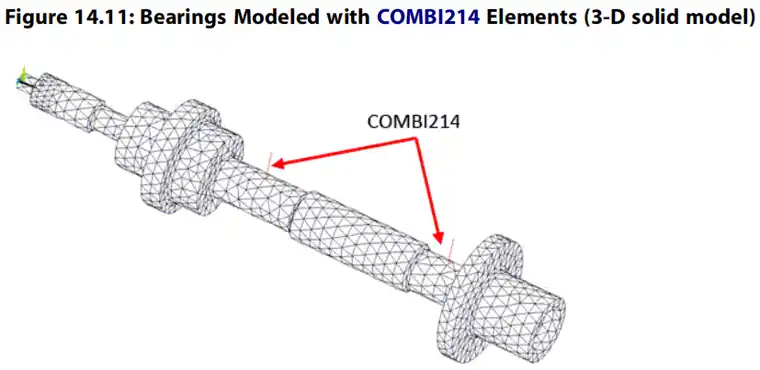
轴承用于横向支撑转子。使用COMBI214单元对两个相同的无阻尼和线性正交各向异性轴承进行建模,如下图所示:
KEYOPT(2)=1用于定义平行于YZ平面的平面中的单元。这些单元的自由度则是UY和UZ。下图中应该添加X、Y和Z轴。
以下是轴承建模的一般流程:
1. 在轴承位置创建接触对(几何图形在这些位置预先切片)。
2. 对三维实体模型使用CONTA174单元,对二维轴对称模型使用CONTA175单元对接触面进行网格划分。
3. 在每个轴承位置(引导点位置)的转子横截面中心创建节点。它代表轴承的第二个节点。
4. 使用这些节点和引导点创建COMBI214单元。
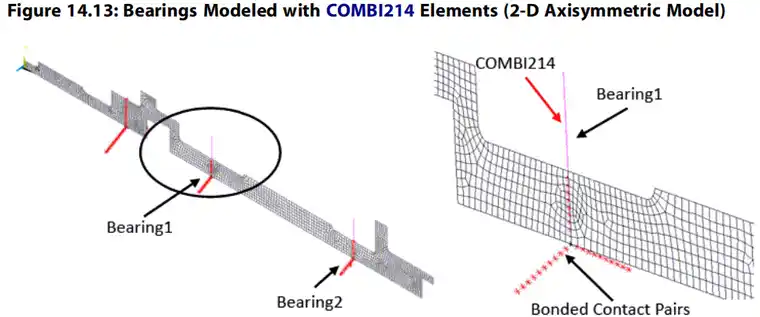
必须创建下图的接触对来建模轴承,接触对的建模方式与前一节圆盘的建模方式类似。

为了对正交各向异性轴承建模,在轴承位置的转子横截面中心创建一个附加节点。然后使用COMBI214单元将该节点连接到引导节点。要可视化该单元,请在不改变结果的情况下沿Y方向偏移节点
如下图和所示:
材料参数
本案例的单位系统如下:

Nelson转子3-D/2-D模型的材料特性如下表所示:
点质量(刚性盘)的特性如下表所示:

两个相同正交异性轴承的刚度特性如下表所示:

边界条件和加载
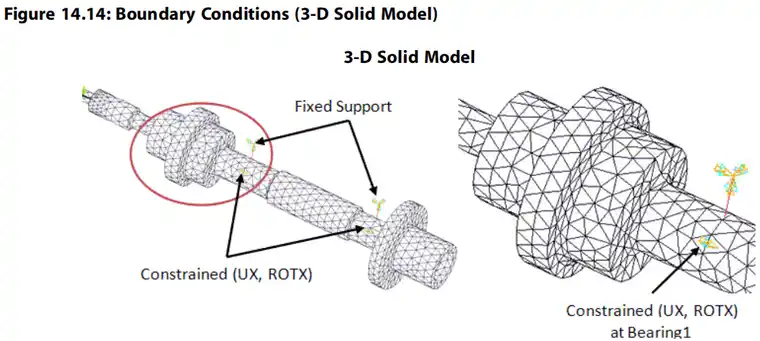
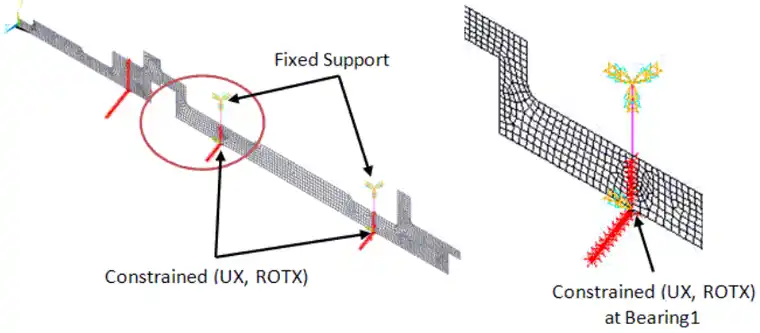
固定支撑条件应用于轴承单元的第二个节点,如下图所示。轴承位置处绕旋转轴的平动和转动自由度受到约束。
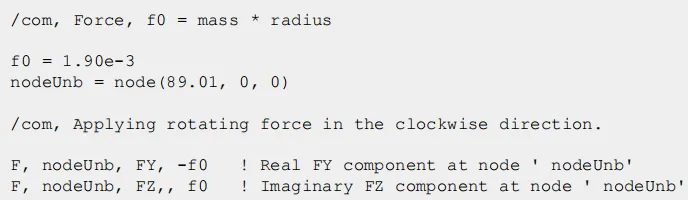
不平衡质量对圆盘的影响由垂直于旋转轴的两个方向上的力表示。力施加在旋转轴上与点质量相同位置的节点上。不平衡力的振幅等于质量乘以不平衡质量到自旋轴的距离。
以下输入片段显示了施加不平衡力的步骤:
分析和求解控制
模态分析
本节讨论了包括和不包括陀螺效应的二维轴对称模型的模态分析。
不包含陀螺效应的模态分析
使用Block Lanczos(LANB)求解器进行无陀螺效应的模态分析,提取12个模态。

包含陀螺效应的模态分析
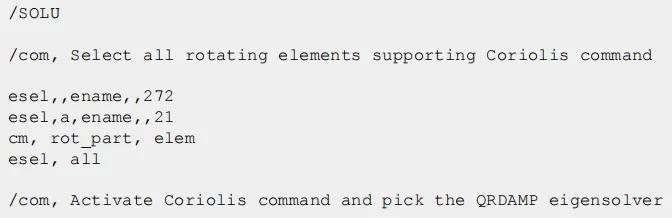
旋转速度由OMEGA或CMOMEGA命令指定。使用CORIOLIS命令包括旋转结构的陀螺效应。
使用复杂QRDAMP特征求解器对模型进行具有陀螺效应的模态分析。
以下输入片段显示了使用陀螺效应进行模态分析的步骤:

坎贝尔图分析
在进行坎贝尔图分析之前,必须使用对应于不同角速度的多个载荷步骤进行模态分析。坎贝尔图(PLCAMP命令)显示了固有频率相对于转速的变化。PRCAMP命令根据坎贝尔图打印出同步(非平衡)或异步力的临界速度。
以下输入片段显示了执行坎贝尔图分析的步骤:

非平衡响应分析
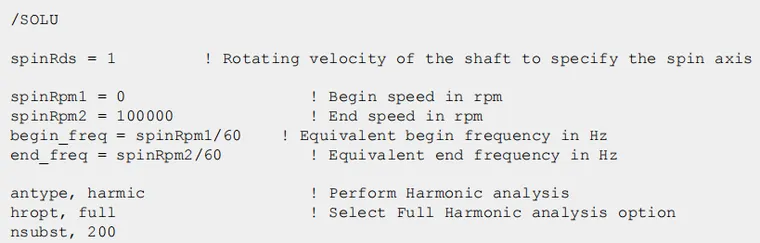
在0至100000 rpm的速度范围内对二维轴对称模型进行谐波分析(频率范围为0至1666.67Hz),使用200个子步。激励该频率范围内的前七个模态。
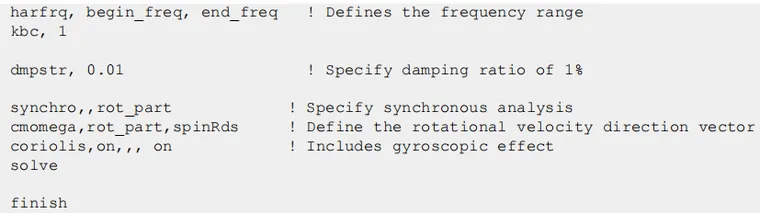
在该分析中,非平衡被看作是载荷。考虑结构阻尼系数为1%。(DMPSTR)
激励频率规定为与转速同步(SYNCHRO)。旋转速度(CMOMEGA)仅确定旋转部件的旋转速度方向矢量。转子的旋转被自动计算(HARFRQ)。
以下输入片段显示了执行非平衡响应分析的步骤:
结果和讨论
评估了无旋转的二维轴对称模型的固有频率,并与下表中三维实体模型的结果进行了比较。

旋转的二维轴对称模型(50000 rpm)的固有频率也与三维实体模型结果显示出良好的一致性,如下表所示。


/POST1结果的坎贝尔图分析如下图所示:
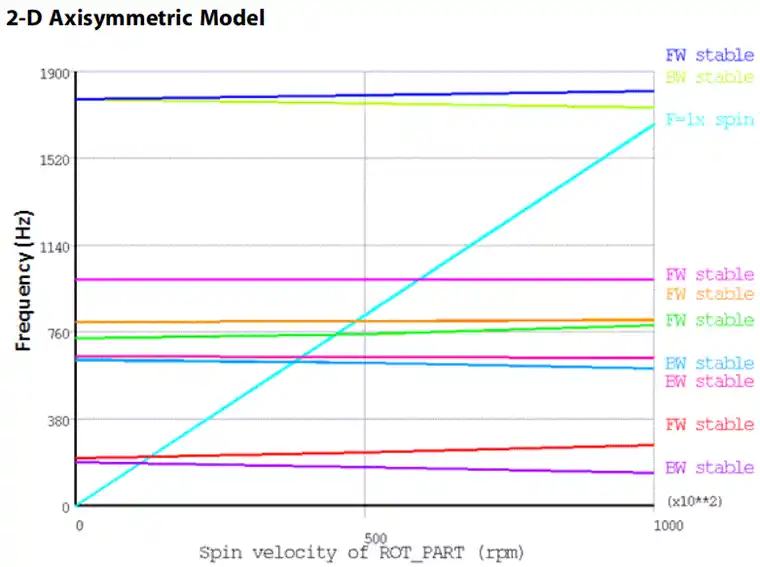

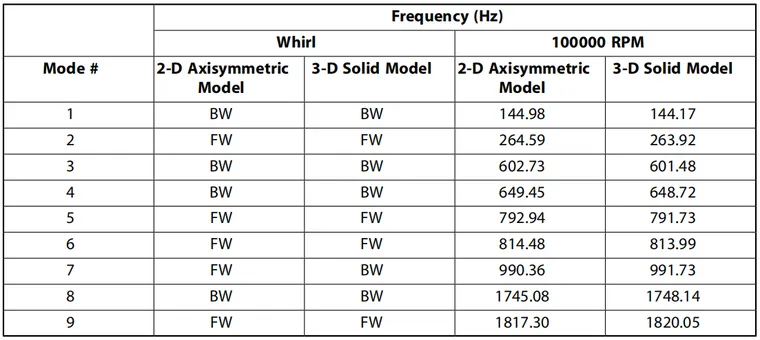
借助坎贝尔图分析,我们可以识别正向(FW)和反向(BW)涡动,以及可能的不稳定频率(尽管本例中没有)。在下表中,将二维轴对称模型在最大转速(100000 rpm)下的涡动和固有频率与三维实体模型结果进行了比较。
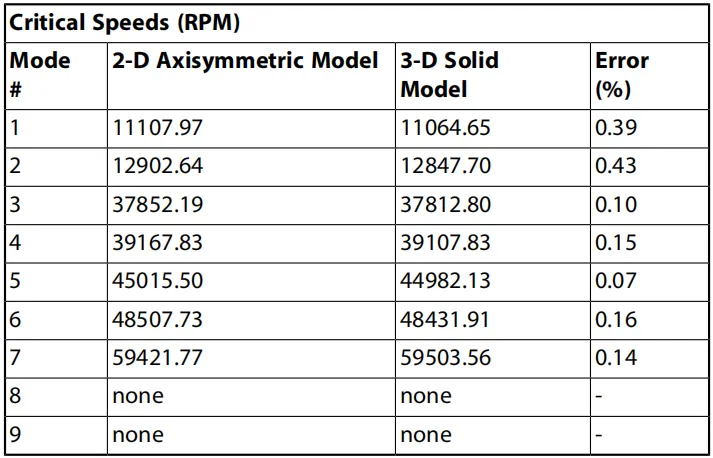
坎贝尔图分析有助于确定旋转结构(PRCAMP)的临界速度。临界速度在下表中进行了比较。对于同步激励,临界速度对应于频率曲线和1.0斜率线之间的交点。二维轴对称和三维实体模型的临界速度显示出很强的一致性。
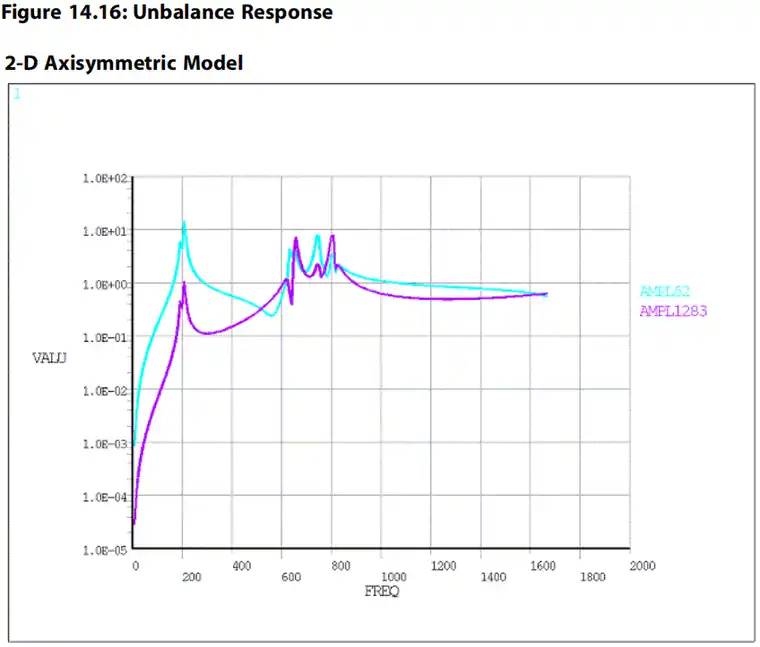
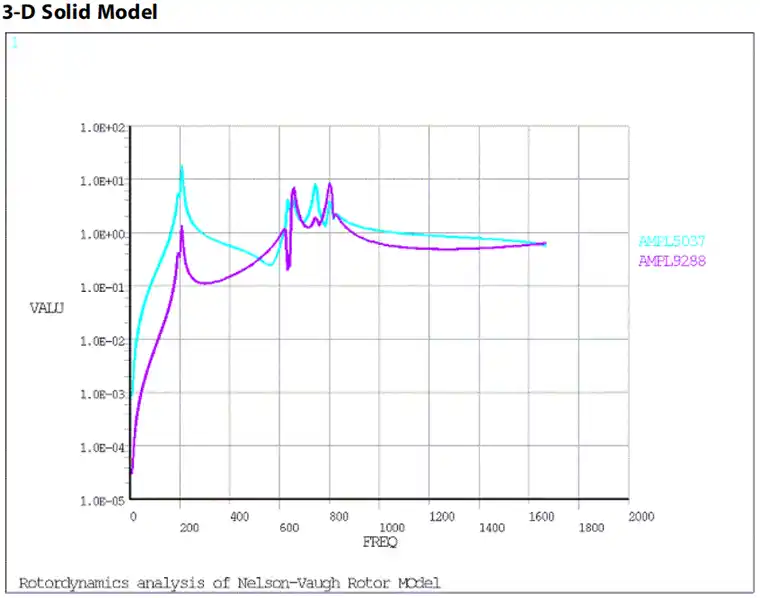
在/POST26中进行后处理的非平衡响应分析结果如下图所示。对数图显示了两个选定节点的位移振幅相对于激励频率的变化。第一个节点位于刚性盘附近,它对应于浅蓝色曲线。第二个节点位于轴承位置附近,它对应于紫色曲线。
临界频率出现在振幅最大的地方,并对应于临界速度。
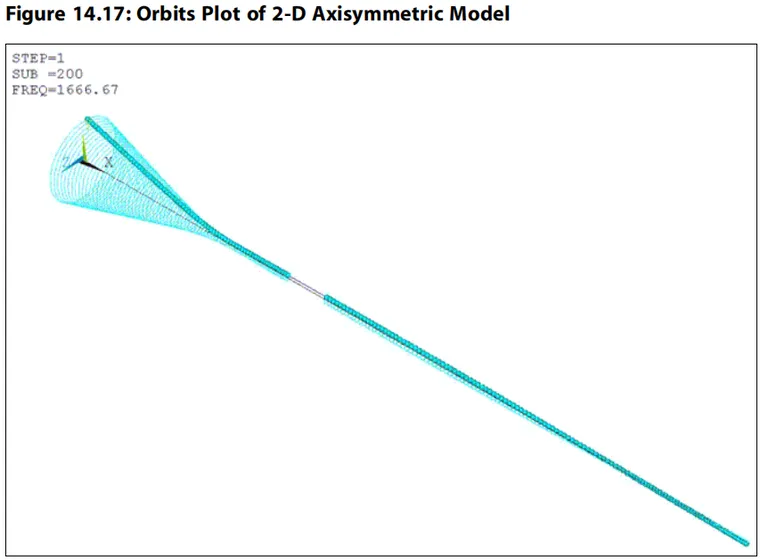
完全谐波分析后的轨道可以在POST1中绘制,如下图所示(PLORB命令)。对于实体单元以及轴对称单元模型,我们需要在旋转速度轴上使用BEAM188添加无质量线单元来绘制这些轨道。频率为1666.67 Hz的二维轴对称模型的轨道如下图所示。转子线为深蓝色,而轨道为浅蓝色。
以下输入片段显示了在给定频率下生成轨道图的步骤:

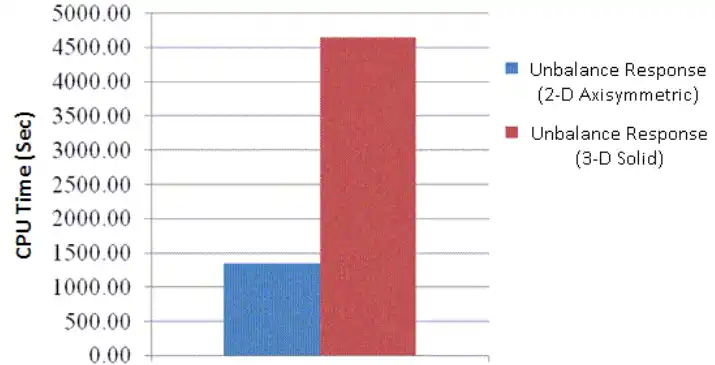
2D轴对称模型的性能好处
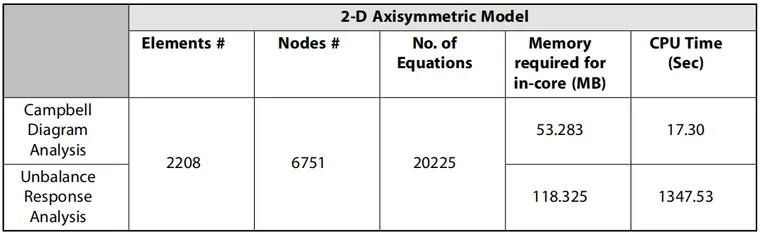
二维模型的内存和CPU使用情况如下表所示:
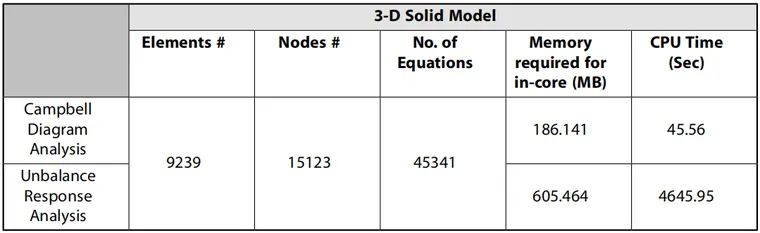
三维模型的内存和CPU使用情况如下表所示:
非平衡响应分析的CPU时间如下图所示:
建议
在CAD几何图形中,识别轴对称和非轴对称零件。非轴对称零件应考虑如下:
——如果惯性可以忽略不计,请基于此零件创建非旋转零部件。陀螺效应将不予考虑。
——如果惯性不可忽略,请删除零件并创建等效的轴对称几何体,以便包括其陀螺效应。最简单的方法是在旋转速度轴上添加一个点质量。点质量特性基于零件质量和惯性。垂直于旋转速度轴的两个旋转角必须相等,以保证轴对称性。
• 对于三维和二维轴对称建模,几何结构在刚性盘和轴承位置进行切片,以便轻松创建这些部件并将其连接到附着在界面的远点。
• 当使用SOLID272或SOLID273对二维轴对称模型进行网格划分时,在圆周方向上选择适当数量的傅里叶节点,以确保良好的精度并将计算成本降至最低。对于线性动力学中的典型转子动力学问题,三个傅里叶节点就足够了。
• 在进行结构的坎贝尔图分析时,始终首先检查零转速下的固有频率。如果支架(轴承或边界条件)对称,弯曲频率应成对出现。如果三维模型不是这样,请尝试细化网格。
• 为了对三维和二维轴对称模型进行非平衡响应分析,使用在旋转速度轴上的一个节点处定义的复合力引入非平衡响应。仅在非线性瞬态分析的情况下,可使用远离旋转速度轴的点质量来定义非平衡响应。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















