软件

产品


本文将介绍动态条件下的车辆碰撞行为,在HPC云平台中使用ANSYS仿真软件对汽车碰撞行为进行仿真分析,以提高结果预测的准确性、减少分析时间以及节省资源利用。
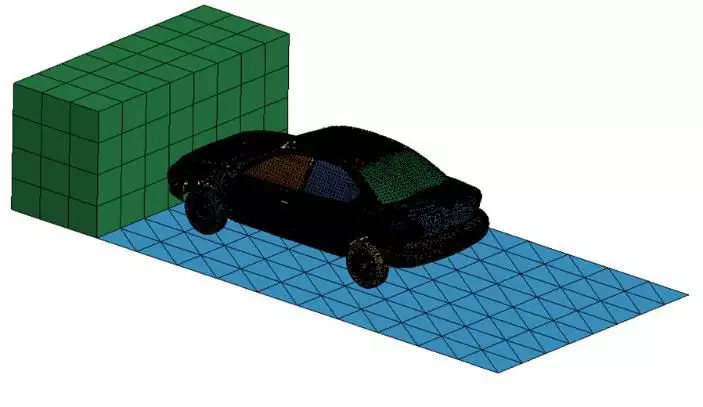
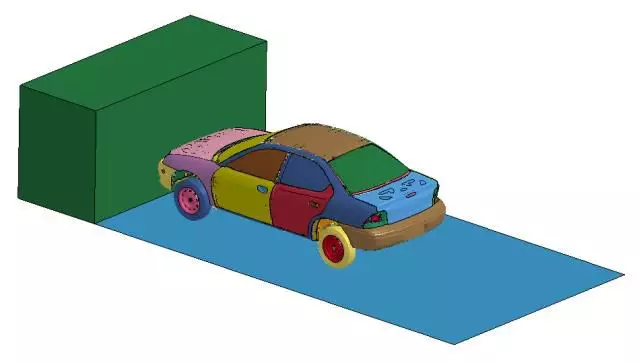
图1:车辆碰撞分析的几何模型
图2:车辆碰撞分析的几何和网格模型
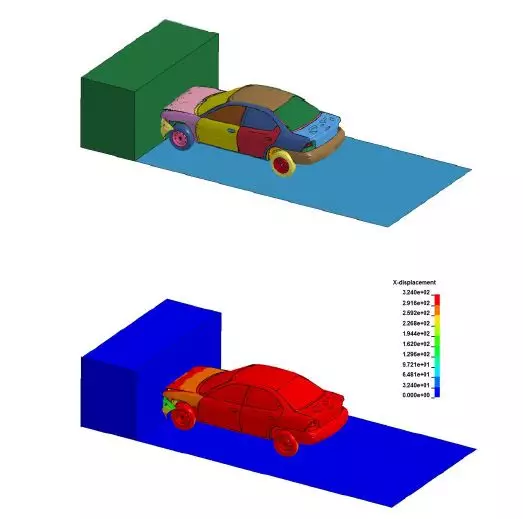
图3:汽车组件的变形图和撞击刚性墙时的渐进损坏
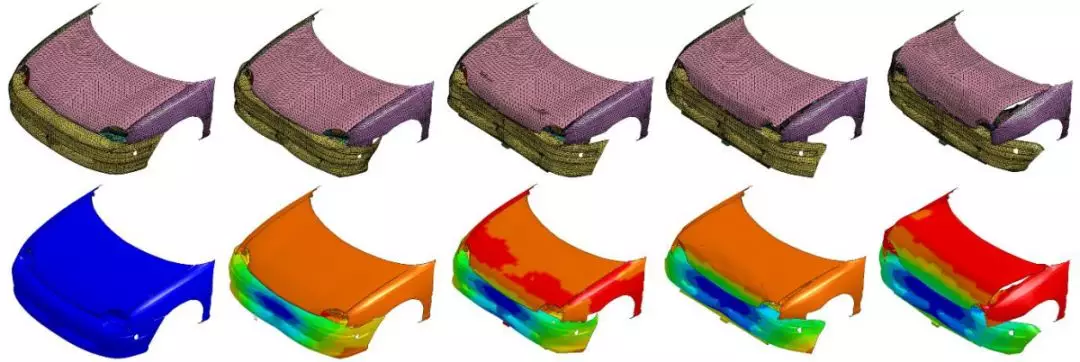
汽车撞击刚性墙,汽车受损过程是渐进的,损坏程度取决于车辆撞击墙壁的速度和速度。撞击汽车部件造成的损坏如图4所示,损坏率可通过视觉比较:
图4:汽车正面撞击墙壁造成的损坏情况
本次测试选择的是256核心系统。主要评估车辆模型的撞击行为,并确定具体损坏率和汽车组件上产生的应力。
通过开发细网格和粗网格来设置不同的有限元模型。然后预估解决具有不同网格强度的模型所需的时间,以便在分析高密度网格模型时对HPC性能进行基准测试。所有开发的模型的边界条件、求解算法、求解器设置和收敛准则保持不变。
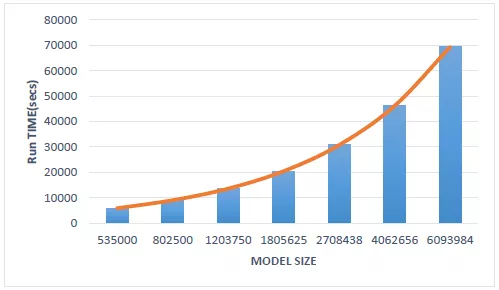
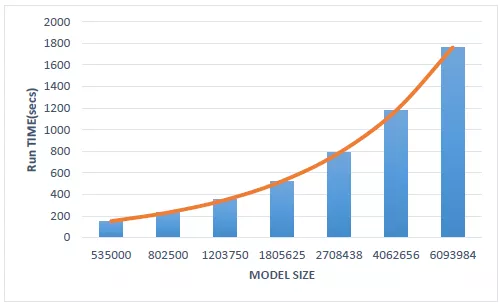
图5和图6展示了并行处理与否的情况下不同网格密度模型所需的求解时间比较图。分析所需时间分别在单核处理器和128核处理器的比较表明,核心数多的处理器所需的解决方案时间要少得多。
图5:不同网格密度下,单CPU核心分析处理所需时间
图6:不同网格密度下,128个CPU核心分析处理所需时间
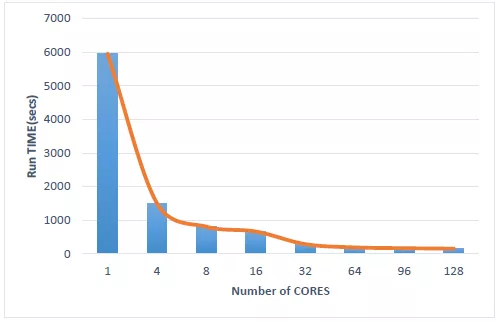
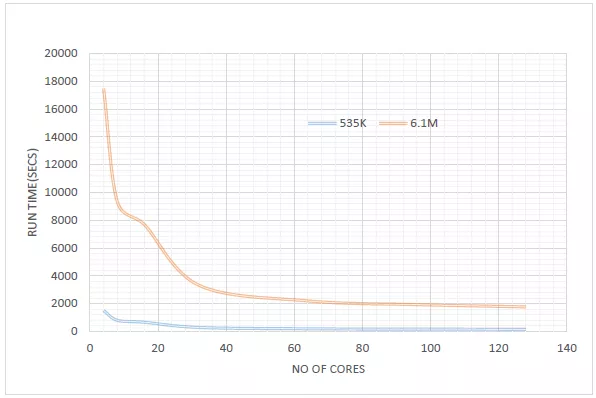
图7展示了同样的高密度模型在不同的核心数处理器下所需的求解时间比较图。图8提供了使用不同CPU核心提交的不同精度网格模型的解决时间比较图。
图7:使用不同HPC Core配置处理高网格模型的所需求解时间
图8:不同HPC核心配置处理不同网格密度模型的求解时间比较
由上图分析可得使用HPC的几大好处:
网格越精细的模型,模拟结果精度越高,同时模拟运行时间要求越高。HPC云平台系统的并行计算提供了求解高精细网格模型的优势,尤其在复杂的、大规模类型的仿真,如汽车正面碰撞测试等,求解时间会大幅度缩短,帮助企业或者工程师在产品设计生产中取得巨大优势。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020