















































软件

产品


ls-dyna在轨道上使用的资料太少了,上网查相关资料也少之又少,而且相关ls-dyna的书都成了绝版不好买,只能买复印版的。文章开头先说一说ls-dyna遇见的奇葩事也是经验总结:
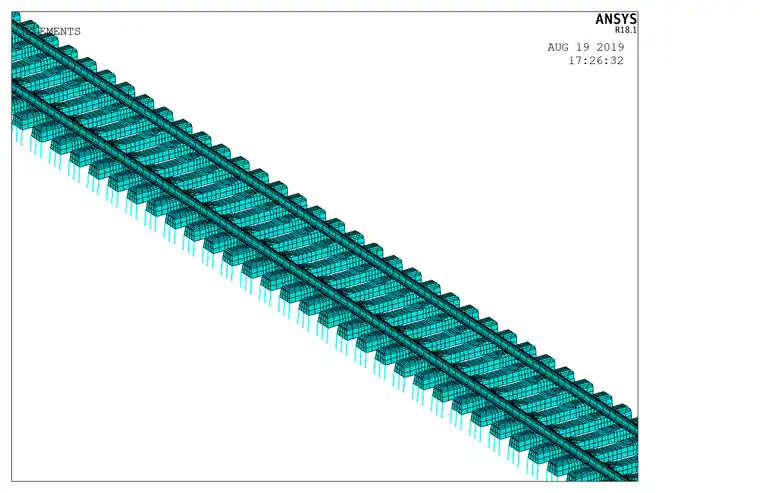
先说说ls-dyna动态仿真。首先用ansys建立了简单的有砟轨道模型,模型共29870个节点,19844个单元,其中钢轨采用60型号钢轨,轨枕采用实际尺寸的三型有挡肩轨枕(模型从CAD导入)如图,轨枕采用*MAT_ELASTIC实体单元,其中扣件和道床采用*MAT_LINEAR_ELASTIC_DISCRETE_BEAM(66)弹簧梁关键字。轮子采用*MAT_RIGID刚体。为了保证模型的准确性,轮对的part部分采用*PART_INERTIA关键字。
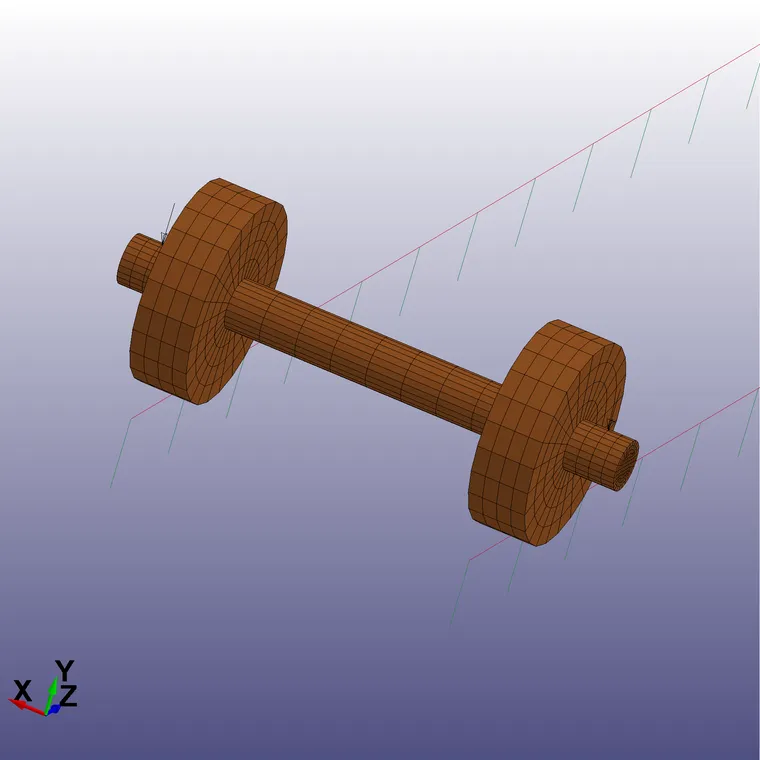
车体方面先建立了一个轮对,轮对采用刚体重1t,在轮对两侧加一对平行的力,使轴重达到14t。如图,
其中轮轨连接采用*rail_track和*rail_train关键字。
*rail_track
1 100 318 4 00.0 1.0 0.0 1
101 1 5 00.0 1.0 0.0
*rail_train
1 200 0.0 0.000e+00 0.0 1 0.0
1.600E+9 0.0 0.0 0.0 0.0 0.0轮轨接触刚度采用标准的1.6e9其中100和101代表左右轨道,318和1代表轨道的起点,
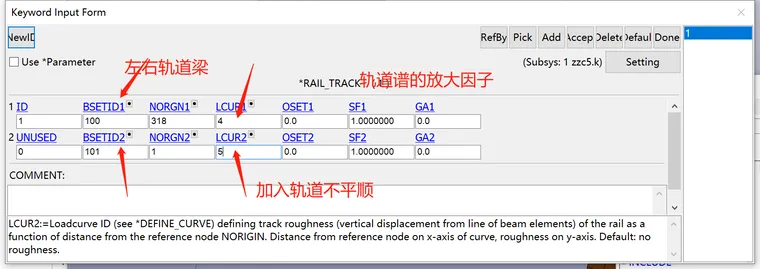
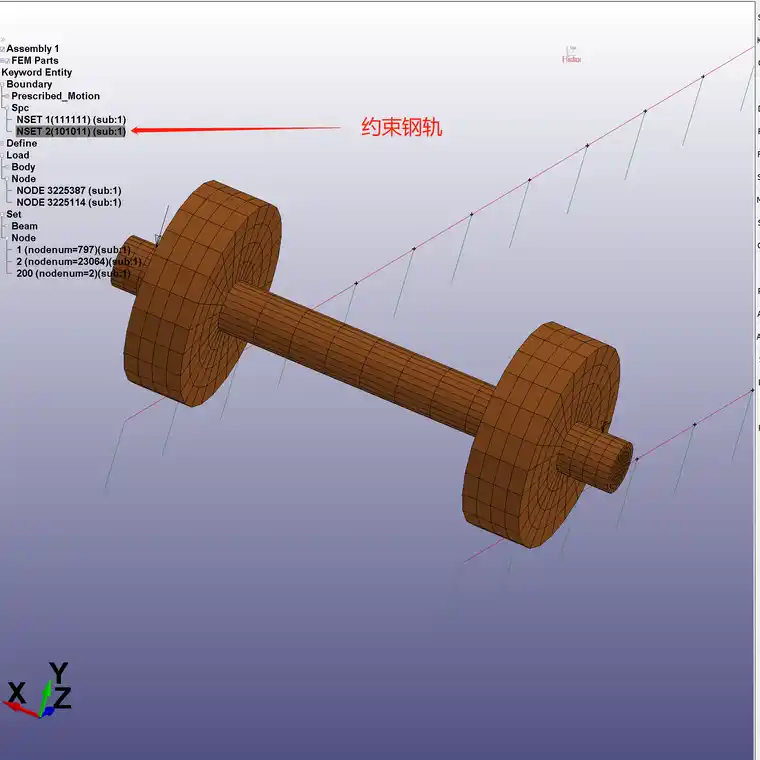
其中轨道按照0.6m划分,节点考虑约束横向。
其中模型中运行了3秒,其中静止了0.3秒。其中速度为160km/h(44.44m/s)
*boundary_prescribed_motion_rigid
5 3 0 3 44.44 0 1e+28 0.3下面来看结果
1.在没有加入轨道不平顺:
轮轨力
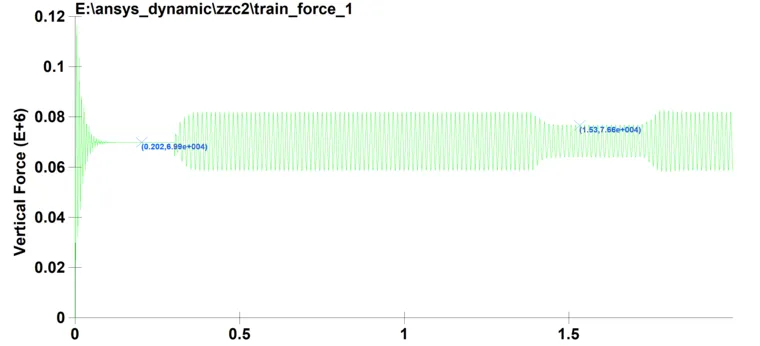
可以看出在静止的3s中轮子的力稳定在69.9kN这和加载的力和轮子的自重的和相等(轴重为14t)为了区分有砟轨道区,阻尼加的有点大,动态的轮轨力为76.6kN.
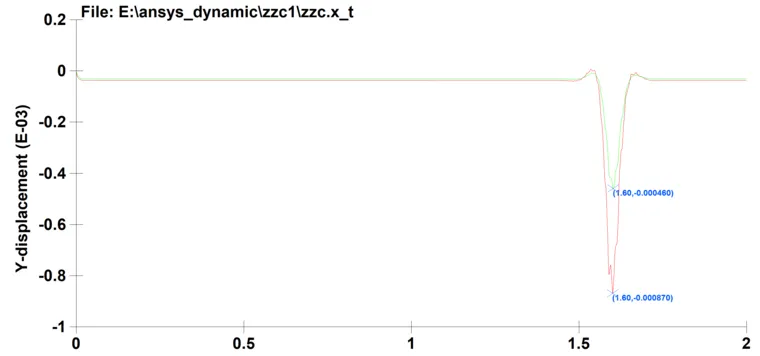
轮子垂向位移:
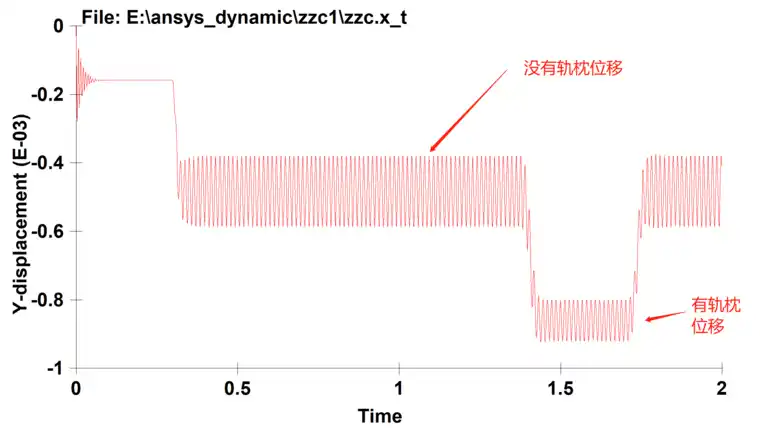
其中轮子的垂向位移为,间隔0.6m的余弦波形图。
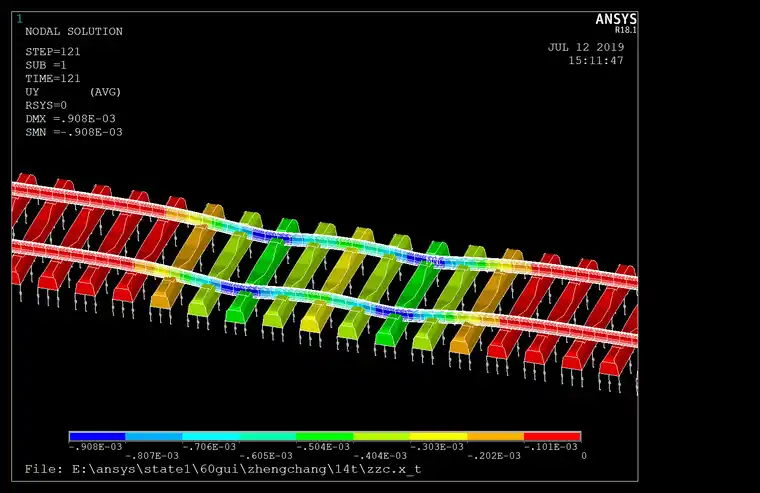
钢轨和轨枕的垂向位移:
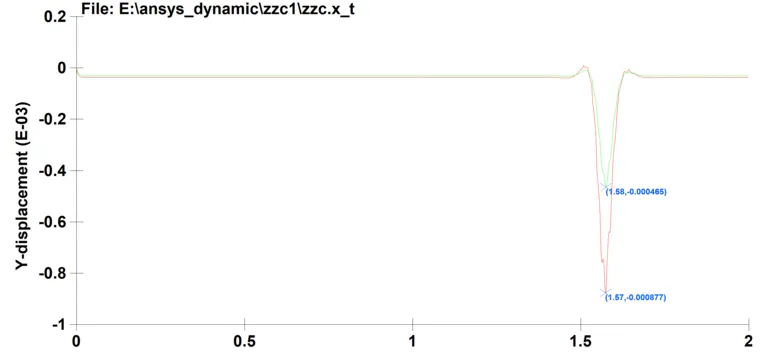
其中钢轨垂向位移为0.877mm其中轨枕为0.465mm,为了验证位移的正确性,在ANSYS中进行静力计算,采用两对个力模型轴重14t的转向架对轨道的力进行加载结果如图为0.9mm
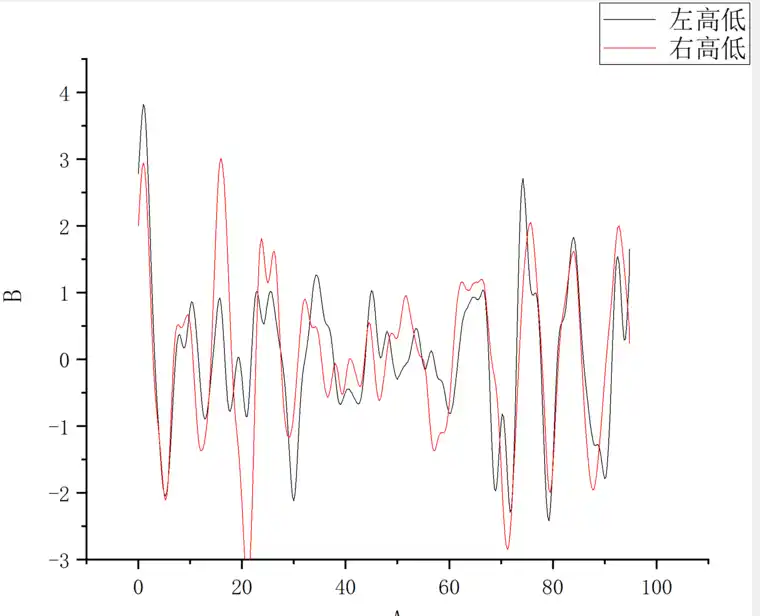
加入轨道不平顺的轨道模型:
为了接近仿真的真实性,加入轨道不平顺如图,
其中加入轨道不平顺后轮轨力如图:
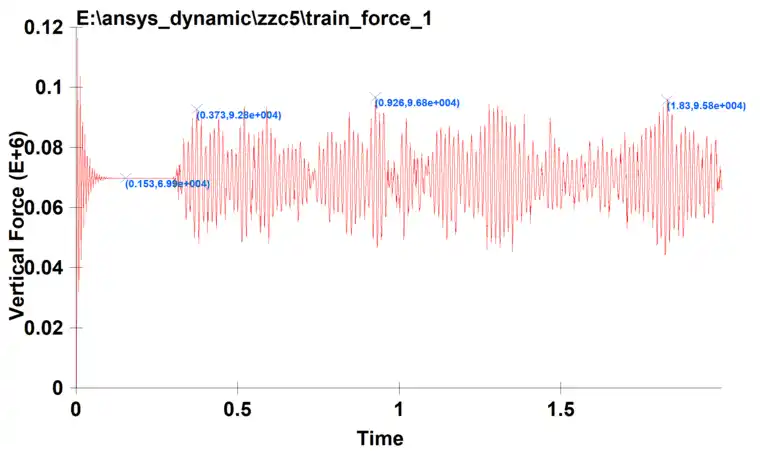
其中静止时也是69.9kN,动态最大为96.8kN,加入不平顺后对轮轨力的影响较大。
钢轨和轨枕位移:
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















