















































软件

产品


什么?未连接到互联网?明明是联网状态,为什么我想访问的页面无法打开?淡定。作为一个Google Chrome浏览器的用户,当你看到下面这个页面时,不要沮丧。换个角度一想,墙内还能有更多的Play时间。
你有没有注意到画面里那个小恐龙?当你遇到打不开网页的时候,只需要再点击一下这个页面(手机),或者按下空格(电脑),随着小恐龙轻轻一跳,一个新世界开启了。
这个“恐龙跳一跳”其实是藏在Chrome浏览器里好多年的一个彩蛋。小恐龙是一只霸王龙(T-Rex)。
2013年Chrome浏览器开始用这个小恐龙的图像代替令人烦恼的404页面。2014年秋天,这只恐龙被正式改造成一个横版小游戏。以彩蛋的方式隐藏在新版Chrome浏览器里。
如果你还不知道这个彩蛋,可以抓紧试一试。比方说,访问一个不翻墙就看不了的网页,或者直接输入chrome://dino,抑或是访https://chromedino.com/(需翻墙)。
后来,这个小游戏也成了不少AI练手的对象。
比如最近就有人在YouTube上贴了一段视频,展示了他如何用神经网络+遗传算法,让一个AI系统独秀于浏览器之中。
我们把精华的部分截取了一下,就是下面这段视频。
动图版:
速度已经快到飞起
总而言之,一句话,这个AI能轻松玩到20000多分……
你能玩到几分?大概率是玩不到这个成绩的吧。毕竟在chromedino.com页面上,人类玩家的历史最高分是18842。
上传这段视频的作者并没有详细公布他用的方法,当然也没有给出一个开源的地址。不过不要紧,也有别人公开分享了更多细节。GitHub上就有一个开源的代码“IAMDinosaur”,同样也是利用神经网络+遗传算法,来搞定恐龙跳一跳。
美中不足的是,上面这个项目也没有配上太详尽的解读。不过最近有个国外的小哥Ravi Munde,列了一份非常详尽的教程。
这个教程用的方法是强化学习中的Q-learning,比较适合入门练手,而且对硬件的要求不高。
Q-learning了解/复习一下
对动物来说,强化学习的能力是与生俱来的。拿儿童学步来举例,如果小朋友努力迈出第一步,就会获得父母的鼓励——可能是鼓掌叫好,也可能是一块糖;但如果小朋友坚决不肯学习走路,那父母就不会给他糖吃了。强化学习就是依照这类激励行为而设置的。
而在这个游戏中,对我们的AI小恐龙来说,强化学习需要让他在无监督的情况下,先认识到做出不同动作的结果,并且以获得高分为最高激励。

一个典型的强化学习闭环
Ravi Munde用Q-learning模拟了一个特殊函数,这个函数驱动AI在不同状况下做出正确的选择。
Q-learning是强化学习的一种无模型实现,根据Q值对每个状态进行判断此时如果采取行动,能获得怎样的奖励。一个样本Q表让我们了解数据的结构。在恐龙跑酷游戏中,状态是当前的游戏截图,能采取的行动是跳或不跳[0,1]。
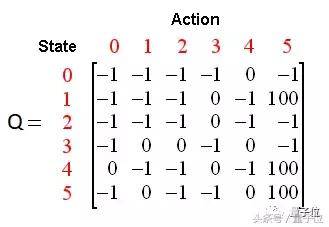
一个样本Q表
Ravi Munde决定用深度神经网络来决定小恐龙何时起跳,而且要在最简单的强化学习实现基础上,引入不同参数来辅助它。
缺乏已标记的数据让强化学习非常不稳定。为了获得适用于这个游戏的数据,Munde小哥决定,先让小恐龙自己瞎跳几千次,把每个动作的反馈记下来,然后从数据中随机挑选一些来训练模型。
但之后,Munde小哥发现,他训练了一个倔强的模型。模型坚定地认为,跳一定比不跳好。所以,为了让模型在训练时能在跳与不跳之间多尝试一下,他引入了一个函数ɛ来决定行动的随机性,然后再逐渐减小它的值来削减随机性,最终让模型去选择最有可能获得奖励的行动。
赞誉分布(Credit Assignment)问题可能会让模型陷入混乱——目前获得的奖励究竟来自于过去的哪个行为呢?在恐龙跑酷游戏中,小恐龙跳到半空中后无法再次跳跃,但模型可能会在恐龙处于半空中时发出跳跃指令,这种情况就让恐龙非常容易砸到仙人掌上。
在这种情况下,“砸到仙人掌上”这个负反馈实际上是上一次做出跳跃决定的结果,而不是刚刚恐龙在半空中时做出的跳跃结果所导致的。
在面临这种问题的情况下,可以引入贴现因子(Discount Factor)γ来决定模型做出动作时看得多远。γ间接解决了赞誉分布问题,在这个游戏中,当γ=0.99时,模型认识到在无障碍时随便跳会导致真的遇到障碍时自己正在半空中,无法继续跳跃。
除了这两个参数之外,后面就几乎不需要任何参数了。
#game parametersGAMMA = 0.99 # decay rate of past observations original 0.99OBSERVATION = 50000. # timesteps to observe before trainingEXPLORE = 100000 # frames over which to anneal epsilonFINAL_EPSILON = 0.0001 # final value of epsilonINITIAL_EPSILON = 0.1 # starting value of epsilonREPLAY_MEMORY = 50000 # number of previous transitions to rememberBATCH = 32 # size of minibatchFRAME_PER_ACTION = 1
你需要准备的是Python 3.6、Selenium、OpenCV、PIL、Chromium driver for Selenium、Keras。略微解释一下这几个工具:
构建这个AI模型,需要用Python编程。而游戏是用JavaScript写成的。所以,得借助一些工具才能更好地沟通。
Selenium是一种流行的浏览器自动化工具,用于向浏览器发送操作指令,以及获取各种游戏参数。
接口的事情搞定了,还得想办法获得游戏截屏。用Selenium也行,但是速度很慢,截屏和处理一次大约得1秒钟。用PIL和OpenCV能够更好地完成截屏和图像预处理,可以达到5fps的帧率。你可能觉得还是慢,但已经足够对付这个游戏了。
游戏模块
下面这个模块,实现了Python和浏览器(使用Selenium)的沟通。
'''* Game class: Selenium interfacing between the python and browser* __init__(): Launch the broswer window using the attributes in chrome_options* get_crashed() : return true if the agent as crashed on an obstacles. Gets javascript variable from game decribing the state* get_playing(): true if game in progress, false is crashed or paused* restart() : sends a signal to browser-javascript to restart the game* press_up(): sends a single to press up get to the browser* get_score(): gets current game score from javascript variables.* pause(): pause the game* resume(): resume a paused game if not crashed* end(): close the browser and end the game'''class Game: def __init__(self,custom_config=True): chrome_options = Options() chrome_options.add_argument("disable-infobars") self._driver = webdriver.Chrome(executable_path = chrome_driver_path,chrome_options=chrome_options) self._driver.set_window_position(x=-10,y=0) self._driver.set_window_size(200, 300) self._driver.get(os.path.abspath(game_url)) #modifying game before training if custom_config: self._driver.execute_script("Runner.config.ACCELERATION=0") def get_crashed(self): return self._driver.execute_script("return Runner.instance_.crashed") def get_playing(self): return self._driver.execute_script("return Runner.instance_.playing") def restart(self): self._driver.execute_script("Runner.instance_.restart()") time.sleep(0.25)# no actions are possible # for 0.25 sec after game starts, # skip learning at this time and make the model wait def press_up(self): self._driver.find_element_by_tag_name("body").send_keys(Keys.ARROW_UP) def get_score(self): score_array = self._driver.execute_script("return Runner.instance_.distanceMeter.digits") score = ''.join(score_array) # the javascript object is of type array with score in the formate[1,0,0] which is 100. return int(score) def pause(self): return self._driver.execute_script("return Runner.instance_.stop()") def resume(self): return self._driver.execute_script("return Runner.instance_.play()") def end(self): self._driver.close()
恐龙智能体模块
这个模块在游戏模块的帮助下,用于控制小恐龙的动作。
class DinoAgent: def __init__(self,game): #takes game as input for taking actions self._game = game; self.jump(); #to start the game, we need to jump once time.sleep(.5) # no action can be performed for the first time when game starts def is_running(self): return self._game.get_playing() def is_crashed(self): return self._game.get_crashed() def jump(self): self._game.press_up() def duck(self): self._game.press_down()
游戏状态模块
神经网络直接使用这个模块,来执行操作并获取新的状态。
'''get_state(): accepts an array of actions, performs the action on the agentreturns : new state, reward and if the game ended.'''class Game_sate: def __init__(self,agent,game): self._agent = agent self._game = game def get_state(self,actions): score = self._game.get_score() reward = 0.1*score/10 # dynamic reward calculation is_over = False #game over if actions[1] == 1: #else do nothing self._agent.jump() reward = 0.1*score/11 image = grab_screen() if self._agent.is_crashed(): self._game.restart() reward = -11/score is_over = True return image, reward, is_over #return the Experience tuple
预处理
游戏修改
原始的游戏相对复杂,比如游戏速度会逐渐加快,障碍物会改变,还会出现云朵、星星、地面纹理等。同时学习这么多东西会消耗大量时间,甚至在训练过程中引入不必要的噪音。
为此作者修改了游戏的源代码、简化界面,去除了一些视觉元素(云、历史最佳成绩等),还有让恐龙的奔跑速度保持不变。
原图
修改后
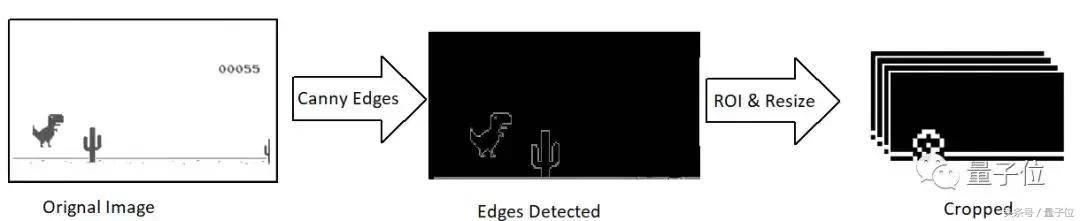
图像处理
原始截图的分辨率为1200×300,包含三个通道。作者计划使用4个连续的屏幕截图作为模型的单一输入,也就是1200×300×3×4。
问题是,这个小哥只有一个i7的CPU可用,所以他的电脑没办法在处理这个尺寸输入的同时玩游戏。所以,还得继续用OpenCV的库调正截图大小、裁剪等。最终输入图像大小为40×20像素,单通道,并用Canny突出显示边缘。
def grab_screen(_driver = None): #bbox = region of interest on the entire screen screen = np.array(ImageGrab.grab(bbox=(40,180,440,400))) image = process_img(screen)#processing image as required return imagedef process_img(image): #game is already in grey scale canvas, canny to get only edges and reduce unwanted objects(clouds) # resale image dimensions image = cv2.resize(image, (0,0), fx = 0.15, fy = 0.10) #crop out the dino agent from the frame image = image[2:38,10:50] #img[y:y+h, x:x+w] image = cv2.Canny(image, threshold1 = 100, threshold2 = 200) #apply the canny edge detection return image
然后,堆叠4张图创建单个输入,也就是:40×20×4。请注意,这里小恐龙也裁减掉了,因为整个学习过程,只需要知道障碍物和与边缘的距离即可。
模型架构
现在输入有了,用模型输出来玩游戏的方法也有了,只差模型架构。
小哥选择把3个卷积层压平,连接到一个512神经元的全连接层(dense layer)上。池化层直接被砍掉了,这个东西在图像分类问题上很有用,但是玩Dino的时候神经网络只需要知道障碍物的位置,池化层就起不了什么作用了。
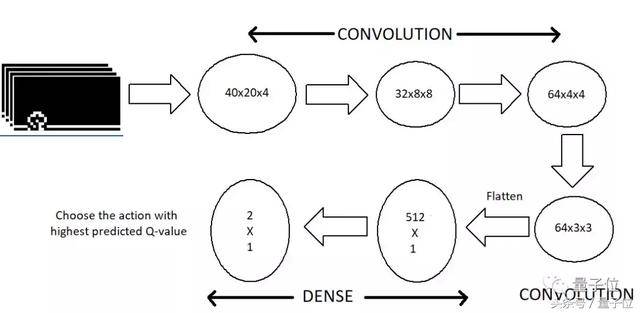
多层网络架构
这个模型的输出,形状和可能的操作数量一样。模型会预测各种操作的Q值,也叫discounted future reward,然后我们选数值最高的那个。
下面这段代码,就能召唤一个用TensorFlow后端的Keras来搭建的模型:
#model hyper parametersLEARNING_RATE = 1e-4img_rows , img_cols = 40,20img_channels = 4 #We stack 4 framesACTIONS = 2def buildmodel(): print("Now we build the model") model = Sequential() model.add(Conv2D(32, (8, 8), strides=(4, 4), padding='same',input_shape=(img_cols,img_rows,img_channels))) #20*40*4 model.add(Activation('relu')) model.add(Conv2D(64, (4, 4), strides=(2, 2), padding='same')) model.add(Activation('relu')) model.add(Conv2D(64, (3, 3), strides=(1, 1), padding='same')) model.add(Activation('relu')) model.add(Flatten()) model.add(Dense(512)) model.add(Activation('relu')) model.add(Dense(ACTIONS)) adam = Adam(lr=LEARNING_RATE) model.compile(loss='mse',optimizer=adam) print("We finish building the model") return model
开始训练
接下来,就是见证奇迹的时刻。
也就是用一段代码来训练模型,这段代码的任务是:
更详细的,可以看这段自带注释的代码:
'''Parameters:* model => Keras Model to be trained* game_state => Game State module with access to game environment and dino* observe => flag to indicate wherther the model is to be trained(weight updates), else just play'''def trainNetwork(model,game_state): # store the previous observations in replay memory D = deque() #load from file system # get the first state by doing nothing do_nothing = np.zeros(ACTIONS) do_nothing[0] =1 #0 => do nothing, #1=> jump x_t, r_0, terminal = game_state.get_state(do_nothing) # get next step after performing the action s_t = np.stack((x_t, x_t, x_t, x_t), axis=2).reshape(1,20,40,4) # stack 4 images to create placeholder input reshaped 1*20*40*4 OBSERVE = OBSERVATION epsilon = INITIAL_EPSILON t = 0 while (True): #endless running loss = 0 Q_sa = 0 action_index = 0 r_t = 0 #reward at t a_t = np.zeros([ACTIONS]) # action at t #choose an action epsilon greedy if random.random() <= epsilon: #randomly explore an action print("----------Random Action----------") action_index = random.randrange(ACTIONS) a_t[action_index] = 1 else: # predict the output q = model.predict(s_t) #input a stack of 4 images, get the prediction max_Q = np.argmax(q) # chosing index with maximum q value action_index = max_Q a_t[action_index] = 1 # o=> do nothing, 1=> jump #We reduced the epsilon (exploration parameter) gradually if epsilon > FINAL_EPSILON and t > OBSERVE: epsilon -= (INITIAL_EPSILON - FINAL_EPSILON) / EXPLORE #run the selected action and observed next state and reward x_t1, r_t, terminal = game_state.get_state(a_t) last_time = time.time() x_t1 = x_t1.reshape(1, x_t1.shape[0], x_t1.shape[1], 1) #1x20x40x1 s_t1 = np.append(x_t1, s_t[:, :, :, :3], axis=3) # append the new image to input stack and remove the first one # store the transition in D D.append((s_t, action_index, r_t, s_t1, terminal)) D.popleft() if len(D) > REPLAY_MEMORY #only train if done observing; sample a minibatch to train on trainBatch(random.sample(D, BATCH)) if t > OBSERVE s_t = s_t1 t = t + 1 print("TIMESTEP", t, "/ EPSILON", epsilon, "/ ACTION", action_index, "/ REWARD", r_t,"/ Q_MAX " , np.max(Q_sa), "/ Loss ", loss)
将这个模型用到从Replay Memory里随机选择的一批上:
def trainBatch(minibatch):for i in range(0, len(minibatch)): loss = 0 inputs = np.zeros((BATCH, s_t.shape[1], s_t.shape[2], s_t.shape[3])) #32, 20, 40, 4 targets = np.zeros((inputs.shape[0], ACTIONS)) #32, 2 state_t = minibatch[i][0] # 4D stack of images action_t = minibatch[i][1] #This is action index reward_t = minibatch[i][2] #reward at state_t due to action_t state_t1 = minibatch[i][3] #next state terminal = minibatch[i][4] #wheather the agent died or survided due the action inputs[i:i + 1] = state_t targets[i] = model.predict(state_t) # predicted q values Q_sa = model.predict(state_t1) #predict q values for next step if terminal: targets[i, action_t] = reward_t # if terminated, only equals reward else: targets[i, action_t] = reward_t + GAMMA * np.max(Q_sa) loss += model.train_on_batch(inputs, targets)
主体方法
调用下面的方法,就能启动上面的训练流程:
#argument: observe, only plays if true, else trainsdef playGame(observe=False): game = Game() dino = DinoAgent(game) game_state = Game_sate(dino,game) model = buildmodel() trainNetwork(model,game_state)
结果
这个模型,小哥用一周的时间训练了200万帧,其中前100万帧用来调整游戏参数修补bug,后100万帧真正用来训练。
现在,这个模型的最好成绩是265分。从下面的得分和损失变化图里,能看出模型的loss在后100万帧逐渐稳定,比较低,但是会随时间波动。
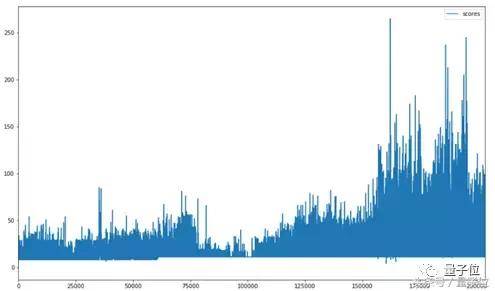
游戏得分
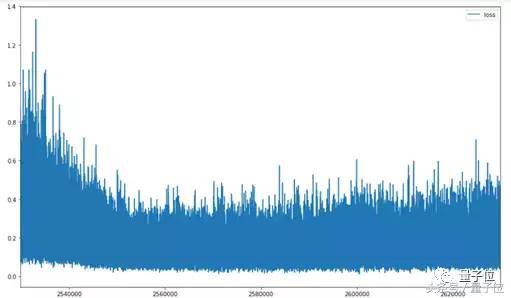
后100帧的损失(loss)
目前的局限
虽然这个模型后来表现还算可以了,但比人类还是差了一大截。
当然,别忘了这个小哥比较穷,他只有一个i7的CPU。
他认为,模型学得还不够快,得分还不够高,要怪这样几个因素:一是因为用CPU来学习,它总是掉帧;二是供这个AI来玩耍的图像实在是太小了,只有40×20,在当前的模型架构下就可能导致了特征的损失,还拖慢了学习速度。
如果改用GPU,说不定……
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















