软件

产品


一、蔚来汽车的智能驾驶能力
这个事故中有两大问题需要关注:一是车辆碰撞这么厉害,需要对车辆进行安全确认,尤其是针对电池检测,确保不会引发后续的起火燃烧;二是需要确认蔚来汽车的辅助驾驶系统是不是存在问题。
关于第一个问题,以前也讨论过比较多。如果遇到碰撞,需要尽快下车确认电池是否有损伤,避免汽车起火的可能。这里就不再展开。
我们来重点关注和了解一下蔚来的辅助驾驶能力NOP。NOP的全称是Navigate on Pilot,中文是领航辅助。
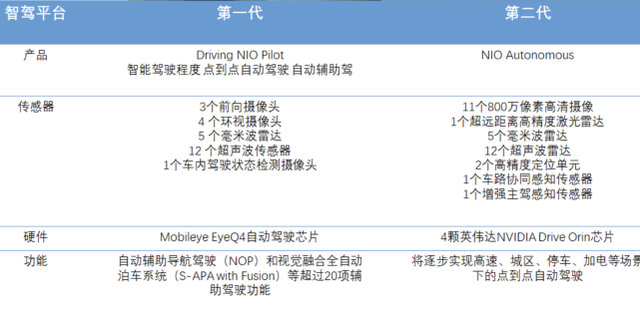
如下图所示,其实主要分为两代:第一代NT1.0是部署在ES8、ES6和EC6上面,从2017年开始迭代至今。在还没正式上市的ET7上,智驾技术平台升级换代到NT2.0,蔚来是通过自己的研发,逐步建立了包含感知算法、地图定位、控制策略和底层系统在内的全栈自动驾驶技术能力。
图1 蔚来的两代辅助驾驶系统平台
2017年12月,在蔚来日“NIO Day”首次发布了驾驶辅助系统NIO Pilot,在随后的很长一段时间内,蔚来是采取硬件预装,然后逐步升级的方式来进行,在感知层面助驾驶的硬件构成,包括3个前向摄像头、4 个环视摄像头、5 个毫米波雷达、12 个超声波传感器和1个车内驾驶状态检测摄像头。
图2 蔚来第一代的辅助驾驶系统软件迭代
在2018年,辅助驾驶主要是以预警的方式体现;2018年底加入了自动紧急刹车;2019年4月份加入自适应巡航功能。比较重大的更新节点是在2019年6月,NIO Pilot系统完成首次重大升级,新增了7项功能,包括高速自动辅助驾驶、拥堵自动辅助驾驶、转向灯控制变道、道路交通标识识别、车道保持功能、前侧来车预警、自动泊车辅助系统;随后一个月加入了全自动泊车系统。
2020年2月,NIO Pilot系统新增自动紧急制动(行人及自行车)、超车辅助以及车道内避让功能;2020年10月,NIO Pilot系统加入了高精地图的使用,新增了自动辅助导航驾驶功能(NOA);在后方横穿车辆预警功能的基础上,增加了主动制动功能;将驾驶员疲劳监测功能进行了升级,新增了摄像头对对驾驶员面部、眼部以及头部姿态特征的识别信息,通过多种信息进行综合判定。今年1月,NIO Pilot系统新增视觉融合全自动泊车、车辆近距离召唤;对NOA功能进行优化:增强了该功能在主动变道与汇入/驶离主路场景下的稳定性。到这个阶段蔚来的第一代软件系统基本在功能层面布局完成。
二、蔚来智能驾驶该背锅吗?
应该说,蔚来的辅助驾驶系统是按照L2级别来设置的,先部署硬件,然后再逐步完善软件。从这个概念上来看,关于目前L2级的智能驾驶,有几点需要车主用户重点关注:
1)系统是在人的监视辅助工作下才行,本身的严格范围是有限的,工作条件超过了,会自动失效或退出。
2)系统执行自动化操作时,驾驶员需要始终监测路况,并准备随时接管。
3)最终的驾驶责任在驾驶员。系统本身就是人机共驾的,驾驶员本身需要监督驾驶过程是否安全,如果因为不监督或者没有及时接管而产生的事故,责任在驾驶员。
图3 蔚来的Nio Pilot是L2级别的辅助驾驶系统
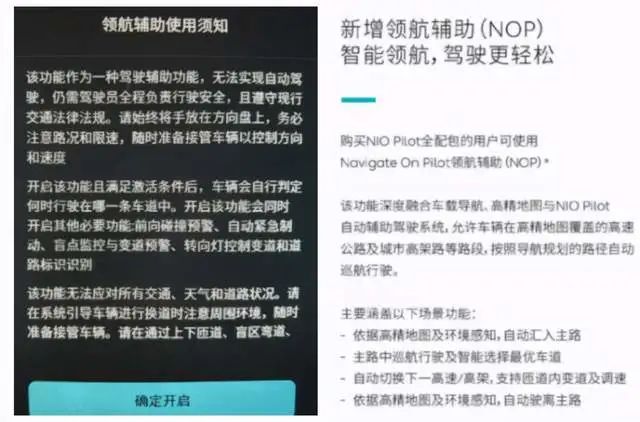
图4 蔚来辅助驾驶的说明
从图4 也能看出,蔚来确实介绍了NOP的领航辅助,强调了驾驶辅助功能,需要由驾驶员来负责。
2021年初蔚来发布了第二代辅助驾驶系统NAD,对这套系统的宣传口径,是存在描述上的变化的,目标是往更高层级的自动驾驶层级来做的。蔚来的这套系统包含NIO Aquila蔚来超感系统和NIO Adam蔚来超算平台,可以说这是正式开始往自动驾驶进行宣传,从目标来看是希望以强的硬件为支撑(11个800万像素高清摄像、1个超远距离高精度激光雷达、5个毫米波雷达、12个超声波雷达、2个高精度定位单元、1个车路协同感知传感器、1个增强主驾感知传感器),通过自己的软件迭代在超算平台上迭代软件,逐步实现覆盖高速、城区、泊车等全场景下的点到点的自动驾驶功能体验。
笔者认为,从宣传的角度来看,蔚来汽车可能需要在传播口径方面需要再把控,比如它的两代系统在宣传口径上面是不是容易让人产生误解,给消费者传递信息过程中,是否严格按照上述的差异区分来传递,这个是需要检查和确认的。
三、辅助驾驶和自动驾驶
在辅助驾驶和自动驾驶的开发和宣传上,由于对商业模式和技术分级的理解不同,我们看到目前在智能驾驶方面的竞争,在传统车企和新兴车企还是有很大的差异。
新造车企业以特斯拉为代表,主要是想要把体验做到第一位,特斯拉所倡导的Autopilot FSD根据图3的分级水平是L2,也就是围绕成本可控的纯视觉方案来做极致的性能体验,从特斯拉看来,自动驾驶是体验有限,通过自动驾驶系统策略和人类驾驶的对比,通过大量的数据“影子模式”不断对比,形成软件的优化。所以这条路线,是以功能多样、体验良好为主要特征的。在分级里面对于软件硬件的诸多约束性原则要求,特斯拉并不在乎。
传统车企是严格遵守SAE的分级设计,从之前L0、L1和L2的基础上,不断去考虑把驾驶员排除在外所需要的带来的感知和安全要求,这方面很大程度是受到法规的约束要求,比如首先推出L3的本田,是在日本政府开放部分商业使用的法规的限制下实现的。
有越来越多的传统车企把L3以上的自动驾驶功能作为未来智能汽车的重要组成部分。从当前的实际情况来看,高速封闭道路是当前辅助驾驶比较成熟的应用场景,造车新势力和传统车企在开发了很多的L2辅助驾驶系统,在硬件和软件上面其实是相似的。在宣传口径上,传统车企更为保守一些。
图5 分级功能下面的软件、硬件电子电气架构和安全概念诉求
四、对于车主的建议
讲了这么多,最后我们给智能驾驶的用户一些建议供参考:
第一、目前消费者对于“辅助驾驶系统”和“自动驾驶系统”对是比较容易混淆的,辅助驾驶系统是帮助我们改善生活,提高驾驶技能,降低驾驶难度,人在这里起到一个监督和控制的作用——这个条件下大家可以安心的使用辅助驾驶,不用因噎废食。
第二、使用辅助驾驶系统,可以有效地降低驾驶负荷,客观上会有一个越用越信任、越用越依赖的正循环。但是千万要保持理智,辅助驾驶系统是有使用限制和边界的,千万不要把辅助驾驶当作自动驾驶,自己放手方向盘完全不管了,这对于自身的安全还是他人的安全都是不负责任的。
我相信这一次事故,对于所有的汽车企业也是监督和警醒。随着工信部对于辅助驾驶功能OTA的管控,一定是把安全监督做在前面,避免悲剧的再次发生。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020