软件

产品


写这个话题,主要是接新造势力电子电气架构分析的第二篇,这块蔚来的工程师出来讲得也比较少。所以只能从售后手册和拆车分析里面获取。
由于蔚来并不是以工程技术为主打口碑,我们看到的千兆以太网络+高性能电控单元构成整车电子电气架构,是逐步看到在2020年的智能网关、智能座舱以及智能驾驶系统,从硬件到软件到应用层开始铺设,2022年量产自动驾驶域控制器ADC采用英伟达ORIN芯片,中央显示控制器单元采用高通8155芯片。
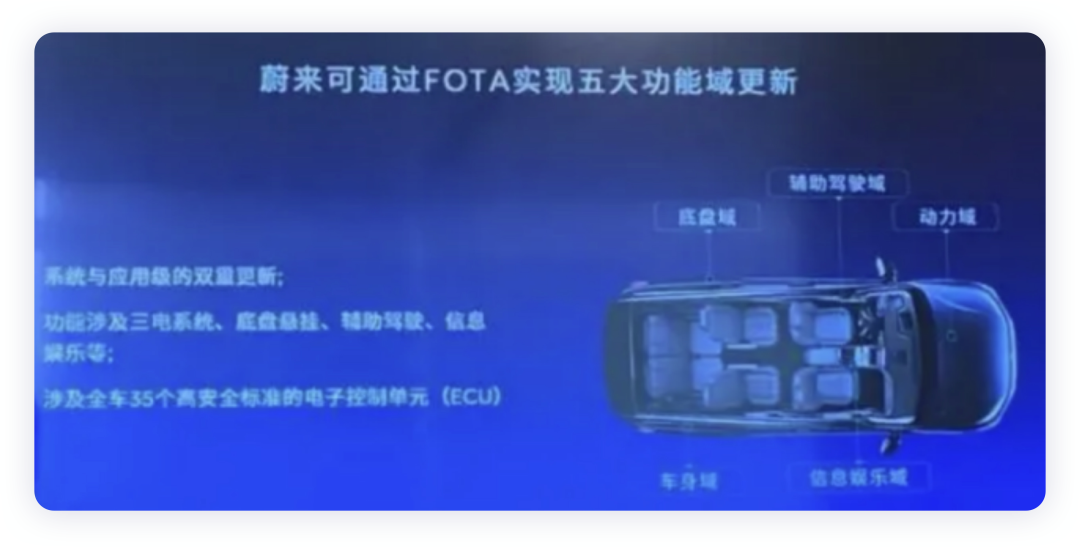
▲图1.蔚来的分域设计,FOTA的时间点是很早的
Part 1
蔚来的演进过程
分段来看:
蔚来第一代电子电气架构(ES8):采用分布式为主,创新点在于智能中央网关(CGW),数字座舱控制器和自动驾驶部分,以太网这块只用在有限的部分。
蔚来改进版本的1.5代(后续升级的ES6、EC6和更新的ES8):导入了自动辅助驾驶控制器和泊车架构,增强了座舱部分,加大了相应的自研软件的力度,主要集中在智能网联、智能座舱、自动辅助驾驶,三电和车身这块有点时间是相对较慢的(电驱电控以及部分车身控制)。
蔚来新的NP2(ET7和ET5):由于智能驾驶和座舱的软件提升,在这块领域里面应用软件与硬件的独立化,网关的迭代和车身在一起的。
下一代:这部分有聊过,东西比较多,目前还在构型阶段。
▲图2.蔚来量产的这一代系统
所以我的理解,蔚来的迭代是一步步演进的,分块把自动驾驶从Mobileye替换成NVIDIA的Orin,把座舱替换成更高级的处理器。然后在CGW上做一些调整,导入了优化设计。
▲图3.蔚来的自动驾驶控制器ADAM
●演进短期
从ES8、ES6和EC6,在硬件不变的情况下,通过软件增强图像信息处理算力, 然后推送新版本满足客户。
●演进中期
从ES系列切换到ET系列下,是围绕全面增强三智模块算力, 增强感知的图像感知能力, 提升NIO Pilot体验,在通信上主要的目的是优化视频信息在智能座舱/智能驾驶两个域间的互通和共享,并且提高以太网带宽和应用场景。
●演进的长期
在开发层面,实现跨域融合优化,提升算力、存储,尽可能导入Zone区域式I/O控制分布架构,通过电气新的设计实现冗余控制,在软件上配合SOA架构, 实现软件和硬件分离, 运算与IO分离。
其实我的理解,蔚来在这个领域并不激进,一步步在走。
Part 2
传统势力的追击
昨天英伟达公布了公司最新的汽车自动驾驶技术平台“Drive Hyperion 9”,还官宣了Lucid Motors和比亚迪等电动车制造商将采用Hyperion的平台架构,新的Drive Hyperion 9平台将于2026年投入使用。目前英伟达在汽车圈客户大致可以分为三类:
●造车新势力
这些企业比较迅速包括蔚来(ET5、ET7)、小鹏(P5、P7、G9)、理想(X01)、威马(M7)、FF、Lucid Group等。
●传统车企
包括上汽智己、飞凡汽车,比亚迪、奔驰、捷豹路虎、沃尔沃、现代、奥迪、路特斯等。
●自动驾驶公司
包括通用Cruise、亚马逊 Zoox、滴滴、沃尔沃商用车、Kodiak、图森未来、智加科技、AutoX、小马智行、文远知行、元戎启行等。
也就是说,我们能看到分布演进的模式,新势力和传统企业没有差异,都在进行只是更快一些。
▲图4.比亚迪的加入,进一步加速了智能汽车的竞争
它的架构总共包括汽车一连串的传感器:车辆外部的14个摄像头、9个雷达、3个激光雷达传感器和20个超声波传感器,以及车辆内部的3个摄像头和一个雷达。
▲图5.英伟达的Hyperion 9
小结:我觉得电池价格上涨,一方面分化了竞争的情况,另一方面也延缓了领先者的起速的节奏——毕竟要让所有人接受更贵的车比较难。在架构不断变更的时代,传统企业也在学习和改进,在没有特别强的工程能力差异下,没有代差的话很容易进入红海竞争。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020