















































软件

产品


通过性能也称为越野性能,是车辆重要的性能之一,指在一定车载质量下,车辆能以足够高的平均车速通过各种坏路及无路地带和克服各种障碍的能力。其中的坏路或无路地带指松软土壤、沙漠、砾石、雪地等松软地面及坎坷不平地段;各种障碍是指陡坡、侧坡、壕沟等。
根据车辆理论,许多因素都影响着车辆的通过性。概括起来主要有:动力来源方面,即发动机性能的好坏及驱动方式;车辆构造方面,包括驱动桥形式、车架形式;外形方面,如整车的流线型以及整体布局;与轮胎有关方面,如轮胎构型、材料等。行驶在地面上的车辆,轮胎是其与地面之间唯一的接触部件,除空气动力的作用和重力外,所有来自地面的作用力和力矩都由轮胎来传递或承担。
因此,探究地面—轮胎—整车相互作用,建立更接近地面—轮胎—整车系统实际工作状况的模型是研究探寻车辆通过性和牵引特性的有效途径,而这也是地面车辆力学中的重要内容。

图1 越野车辆
本方案基于离散元仿真,结合车辆仿真标准方法—多体动力学方法,形成颗粒力学-多体动力学耦合仿真平台,在保证从细观角度考察地面土壤的动态行为及轮胎与地面土壤接触受力同时,能够充分考察车辆的转向性能、越障性能、牵引性能、行驶平顺性、操纵稳定性等,为设计军用/民用越野车辆、军用装甲车辆、农业机械、矿山机械及深空探测车辆等提供指导,对国防建设和国民经济发展都具有重大意义。
解决方案
1、离散元方法

图2 EDEM结构框架及功能
由众多试验和理论表明,地面条件是影响车辆行驶性能的主要因素之一,因此研究轮壤关系首先需要建立正确的土壤物理模型以及力学本构。土壤的主要物理特性主要包括:土粒大小、颗粒级配、密度、含水量、孔隙率等;土壤的力学特性主要包含两部分:抗剪强度和弹性变形。
EDEM软件为用户提供了专用的土壤模型案例包,该案例包中包含了8种适用于土壤仿真的力学模型,充分考虑了土壤的物理特性和力学特性,这包括3种同时考虑土壤弹塑性变形和含水量的不同参数的EEPA接触、2种考虑塑性变形的Hysteristic Spring模型、2种考虑土壤粘性的JKR模型以及1中不考虑粘性和可压缩性的Hertz Mindlin模型,用户在使用时可按照引导选择正确的力学模型。

图3 考虑土壤粘性和可压缩性的EEPA接触模型仿真
2、多体动力学方法
虚拟样机技术是当前设计制造领域的一门新技术,它利用软件建立机械系统的三维实体模型和力学模型,在各种虚拟环境中真实地模拟系统的运动,分析和评估系统的性能。
多体系统动力学是虚拟样机技术的核心理论,包括多刚体系统动力学和多柔体系统动力学,是研究多体系统运动规律的学科。多体系统一般由若干个柔性和刚性物体相互连接所组成,其结构和连接方式多种多样,因而动力学方程式一般都是高阶非线性方程,特别是多柔体系统的动力学方程是强耦合、强非线性方程,只能通过计算机用数值方法进行求解。
车辆是一个复杂的多体系统,外界载荷的作用更加复杂多变,“人-车-路”三位一体的相互作用使车辆动力学模型的建立、分析、求解始终是一个难题。
多体动力学的迅速发展为车辆动力学的研究提供了一个方便快捷的手段。由此,车辆动力学研究的力学模型逐渐由线性模型发展到非线性系统模型;模型的自由度由二自由度发展到数十个自由度,甚至到数百个上千个自由度。模拟计算也由稳态响应特性的计算发展到瞬态响应特性和转弯制动特性的计算。
目前多体动力学仿真已日渐成为国内外的各主要车辆和研究机构的通用方法和标准。目前在车辆领域广泛应用的多体动力学仿真软件有多种,包括MSC.ADAMS、Recurdyn、西门子公司的Virtual Lab Motion等。

图4 ADAMS中车辆仿真
3、DEM-MBD耦合
EDEM软件均可以实现与MSC.ADAMS、Recurdyn、Virtual Lab Motion等的耦合仿真。通用耦合流程如下图所示:
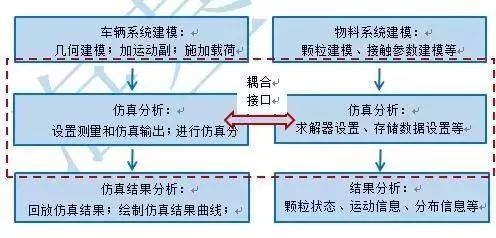
图5 DEM-MBD耦合流程示意图
以EDEM-ADAMS耦合为例,依托于海基自主研发的耦合接口EALink,EDEM可实现和ADAMS的单双向耦合。
单向耦合:每一个时间步内,ADAMS将指定部件三个方向的平动值和转动值(具体指X,Y,Z方向的线位移与线速度、X,Y,Z方向的角位移与角速度)传递给EDEM中对应的几何体,EDEM中几何体依据得到的位移与速度数据运动。
双向耦合:每一个时间步内,ADAMS将指定部件三个方向的平动值和转动值传递给EDEM中对应的几何体,几何体的位置变动导致颗粒受力的位置大小方向不同;接着,EDEM计算出此时颗粒对几何体的作用力与作用力矩,并将作用力与力矩数据传递回ADAMS中,那么在下一个时间步起始,ADAMS将根据新的载荷信息和自身驱动联合计算出部件新的位移、速度信息,循环交互传递数据,完成双向耦合计算,双向耦合计算流程如图所示。
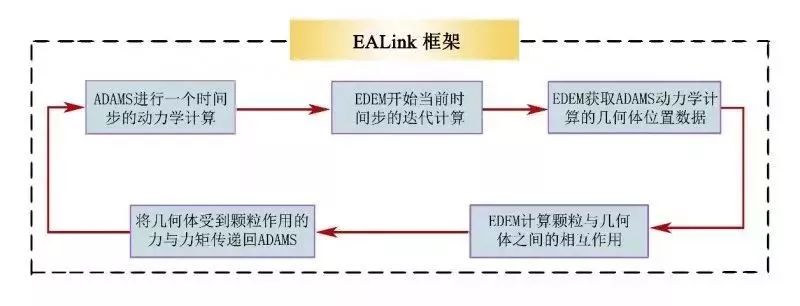
图6EDEM-ADAMS耦合原理示意图

图7 EDEM-ADAMS耦合
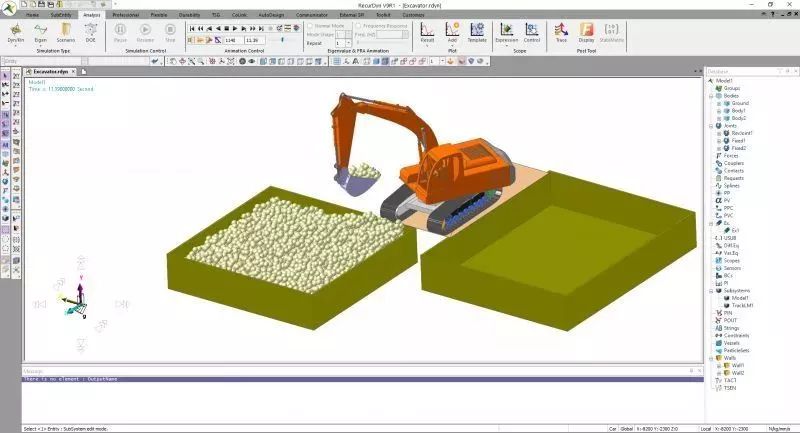
图8 EDEM-Recurdyn耦合
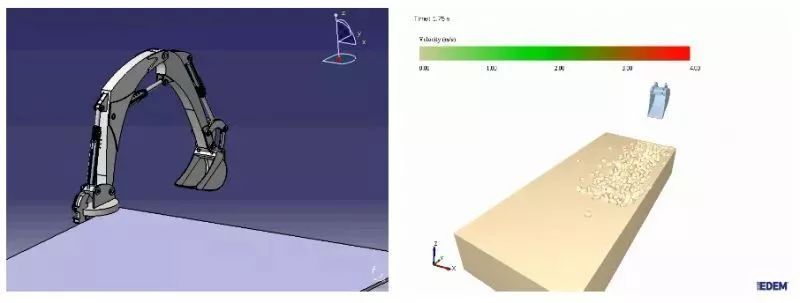
图9 EDEM-Virtual Lab Motion耦合
应用案例
1、坦克转向性能研究
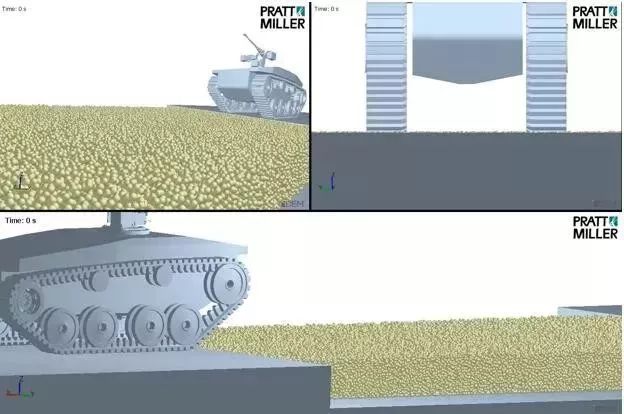
图10 坦克及地面模型
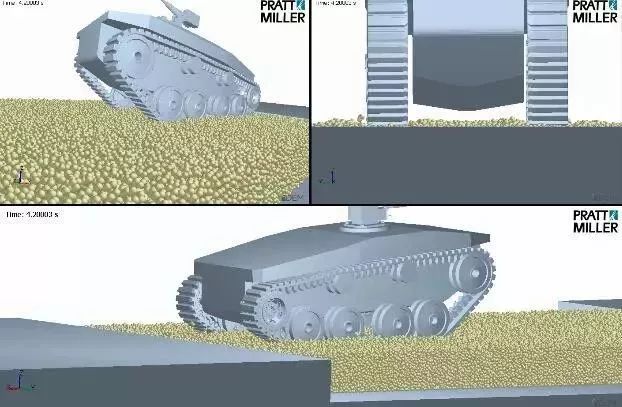
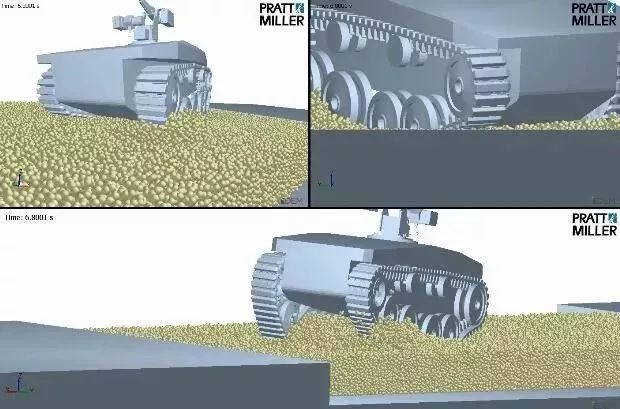

图11 不同时刻坦克运动
2、悍马越野车性能研究

图12 越野车及路面模型
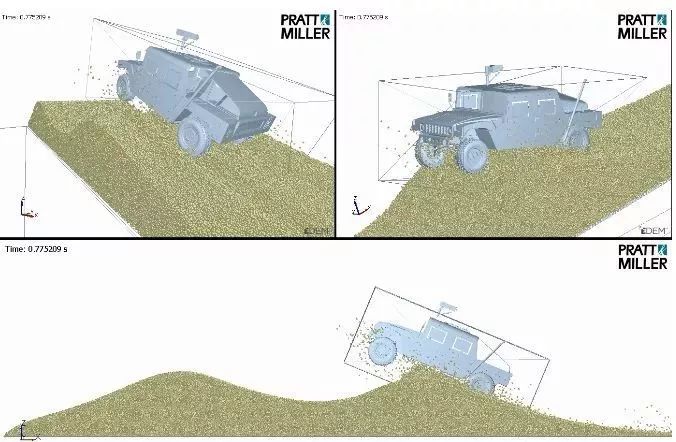
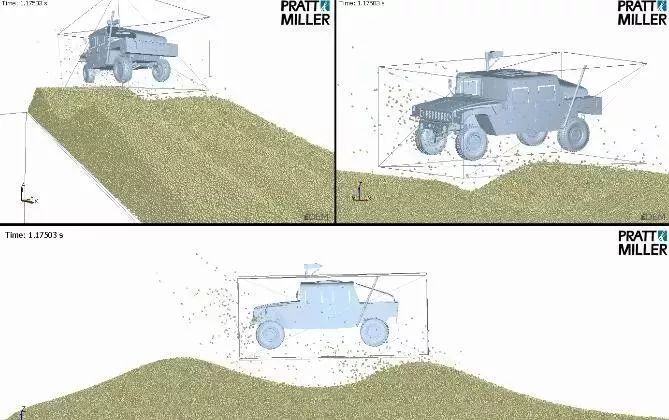
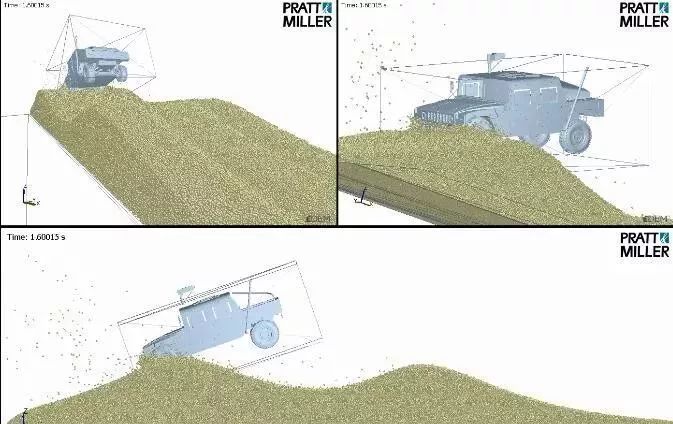
图13 越野车不同时刻运动情况
3、轿车侧翻过程中安全性能仿真


图14 车辆侧翻实验不同时刻照片
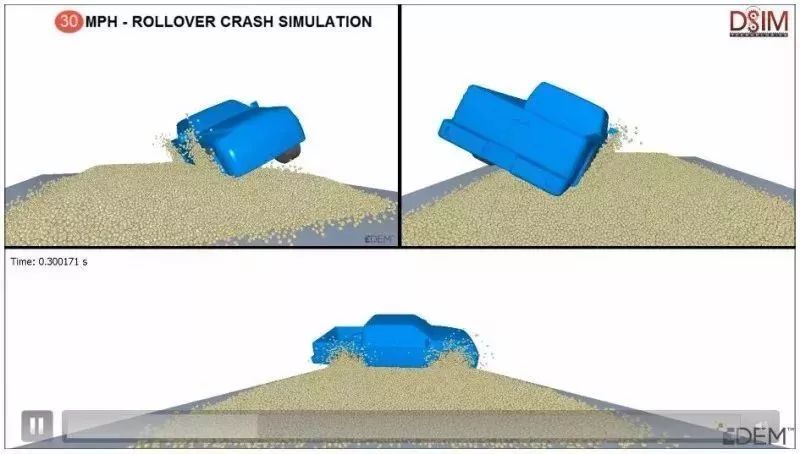
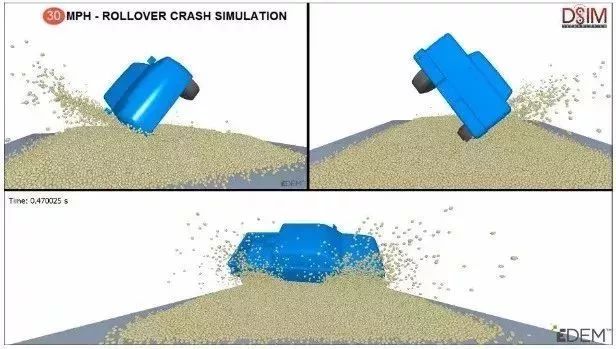
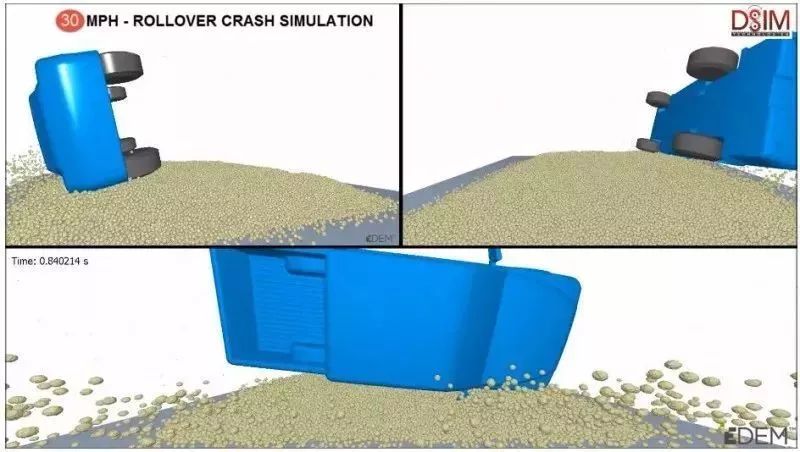
图15 车辆侧翻仿真-不同时刻侧翻

图16 不同侧向速度下汽车侧翻的角速度
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















