















































软件

产品


首先,我们假设对手打过来一个高抛球,到我们这边与球拍撞击时,羽毛球与垂直方向夹角30°,球速10m/s,球拍沿水平方向迅速打击,给羽毛球一个瞬时冲量,这里的拍网采用带预紧拉伸的truss单元来模拟。
边界条件设置
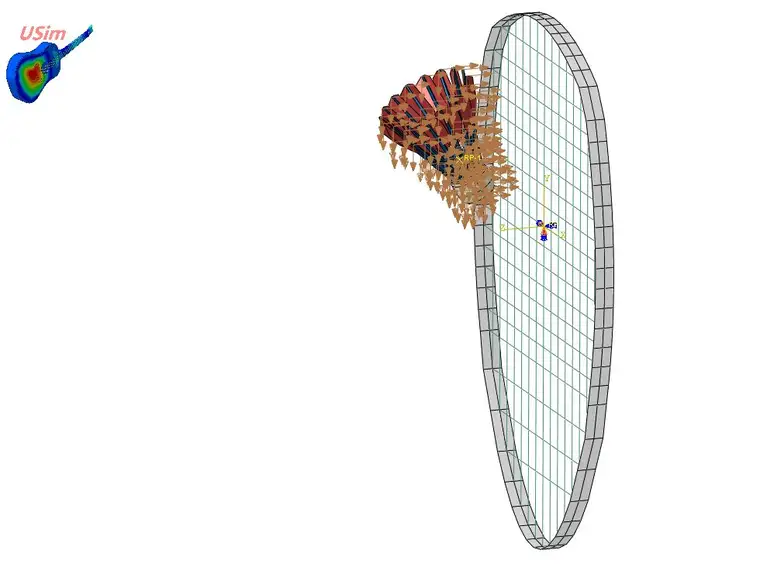
通过Abaqus/Explicit仿真计算得到羽毛球在拍子击打的瞬间,它的动态变形与运动状态如下图所示。

羽毛球受到球拍打击的瞬间
我们还可以获得羽毛球的速度曲线与其离拍之后的运动姿态,可以看到羽毛球在离拍的瞬间获得60m/s的初始速度。

羽毛球上某测点速度曲线
你应该已经注意到了,上面的仿真结果中,羽毛球并没有调头啊?是的,我们忽略了一个极其重要的因素:空气阻力。
由于打击过程考虑了羽毛球的变形,再考虑流固耦合的话,计算耗时巨大,我们就单纯的分析羽毛球姿态变化而言,合理地简化一下这个过程:
a. 假设羽毛球从接触到离开网拍的过程中(1ms左右),空气对羽毛球的离拍速度影响可以忽略不计;
b. 假设离拍后空气和羽毛球的相互作用过程中,空气阻力致使羽毛球的变形是极小的,并且对于姿态分析是无关紧要的。
抛去这些次要因素,再通过流固耦合方法来分析羽毛球的姿态变化就简单多了,在这个分析过程里,羽毛球考虑为刚体,刚体上的拉格朗日网格与空气域的欧拉网格进行相互接触。我们以前面的仿真为基础,取离拍的瞬间,球头竖直向下、初始速度60m/s,方向水平作为流固耦合分析时羽毛球的初始状态。
注意,为了节省计算时间,这里仅对羽毛球可能划过的区域进行空气域建模,欧拉边界离相互作用区域比较近,针对这个问题而言,要对所有面设置无反射边界条件。
羽毛球姿态变化的CEL分析
通过Abaqus/Explicit计算可以得到羽毛球的姿态在空气阻力作用下,调整为指向球头的状态。

羽毛球在空气中的运动
并且,羽毛球的速度在80ms内降到了20m/s,这个过程中它向前运动了2.3m左右,这样看起来就比较正常了,在后面的运动过程中,它还会持续受到空气阻力的作用,继续减速,最终获得稳定的下落速度(理想空间内,不受其他阻碍的状态下)。
羽毛球划过的流场(剖面)

Abaqus算得羽毛球的姿态变化过程
这个调头动作得益于羽毛球的形状与质量分布特点,也即是其压心与质心的位置关系能够很好地满足静稳定飞行要求。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















