















































软件

产品


在ABAQUS中,当需要获取节点上的应力时,可以在后处理中建立路径或者用查询功能等获取.
但是当需要大量的节点上应力数据时,很多人会用Python编程进行大批量的提取应力.但是提取出来的应力为单元积分点上的应力.无法获取节点上的应力.同时在ABAQUS中的子程序中,也是对积分点上的数据进行操作.
本文基于个人兴趣同时想要更加了解有限元背后原理和公式的想法.近日进行了一些初步的探索.希望大家批评指正. 本文基本不涉及原理公式,只在转换积分点和节点的应力时列出公式。尽可能简介易懂。
一: 单元类型及节点数目与位移,应变,应力阶次的关系
本节内容基于有限元教材及一些网上资料.
1)有限元求解的思路是:
一: 建立单元节点力与节点位移关系式.
二: 将弹性体上的外载荷等效移置到节点上.
三: 在节点上建立力的平衡方程,求得节点位移.
四: 通过弹性力学基本方程,可求得单元的应力和应变.
2) 四节点矩形单元
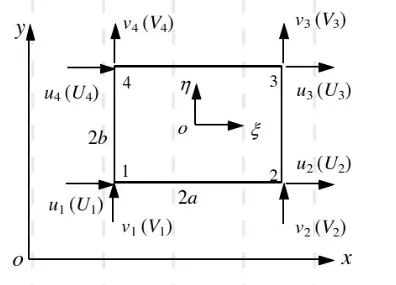
以四节点矩形单元为例,在此只表达有限元教材中的结论,具体公式可参考有限元教材。
3)ABAQUS中的CPE4单元
CPE4: A 4-node bilinear plane strain quadrilateral.
该单元有四个节点,同时有四个积分点。
对于每个应力分量(注意:在此只看一个应力分量),单元内任一点(x,y)的应力表达式为:
stress=a*x*y+b*x+c*y+d (1)
该表达式有四个未知量:a,b,c,d。
若知道四个积分点的应力分量。将每个积分点带入上式,则会形成包含四个方程的线性方程组。(注意:变量是a,b,c,d,而不是x,y.所以方程组是线性的)
第一个积分点的应力和坐标:S1,(X1,Y1);
第二个积分点的应力和坐标:S2,(X2,Y2);
第三个积分点的应力和坐标:S3,(X3,Y3);
第四个积分点的应力和坐标:S4,(X4,Y4);
现在的问题是:应力分量S1,S2,S3,S4是已知的,我们需要知道真实的积分点的坐标信息吗?
答案:不需要,只需要知道积分点在整个单元相对位置即可。即等参元中的坐标。(教材中有)
等参元的长和宽都为2.
而有限元中的积分是高斯积分,积分点的位置是固定的。由查表可知:
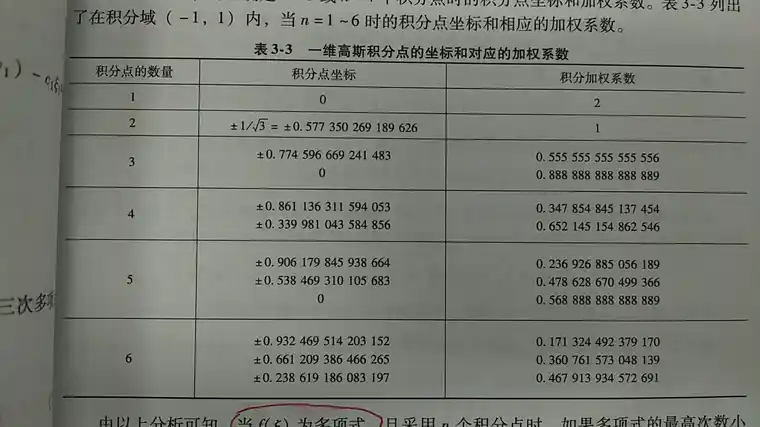
上表是一维的高斯积分点的坐标,后面的加权系数不用管(我们不求积分)。由一维可以猜出二维(两个一维)。二维有4个积分点,所以我们对应一维选第二行的数据。

最终四个积分点在等参元中的坐标如下(顺序目前是乱的,后面需要进一步判断):
第一个积分点的应力和坐标:S1,(0.577,0.577);
第二个积分点的应力和坐标:S2,(0.577,-0.577);
第三个积分点的应力和坐标:S3,(-0.577,0.577);
第四个积分点的应力和坐标:S4,(-0.577,-0.577);
同时四个节点在等参元中的坐标如下(顺序目前是乱的,后面需要进一步判断):
第一个节点的应力和坐标:(1,1);
第二个节点的应力和坐标:(1,-1);
第三个节点的应力和坐标:(-1,1);
第四个节点的应力和坐标:(-1,-1);(因为等参元为边长为2的正方形)
4)求节点上的应力
将四个已知的积分点数据代入应力表达式(1)中:
S1=a*0.577*0.577+b*0.577+c*0.577+d
S2=-a*0.577*0.577+b*0.577-c*0.577+d
S3=-a*0.577*0.577-b*0.577+c*0.577+d
S4=a*0.577*0.577-b*0.577-c*0.577+d
换成矩阵形式:
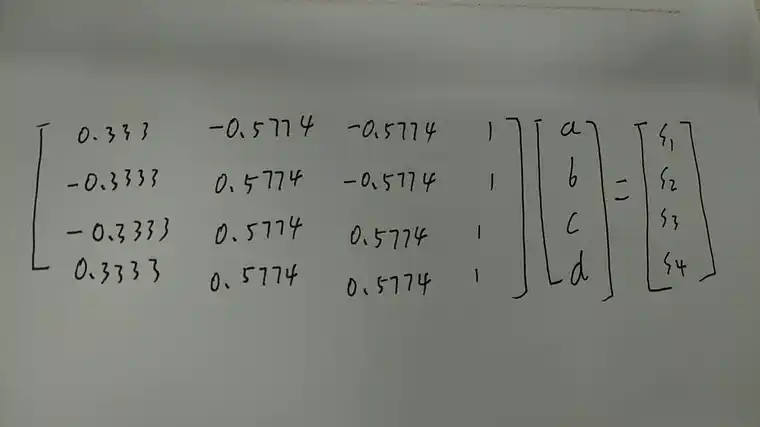
求该线性方程组即可得出系数:a,b,c,d和应力的表达式。
然后将节点坐标代入表达式即可求出相应节点的应力。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















