















































软件

产品


打开odb并选择工具>作业诊断。作业诊断会提供所有警告和错误,以及剩余和联系信息。最有用的功能之一是在视口中选中高光复选框。
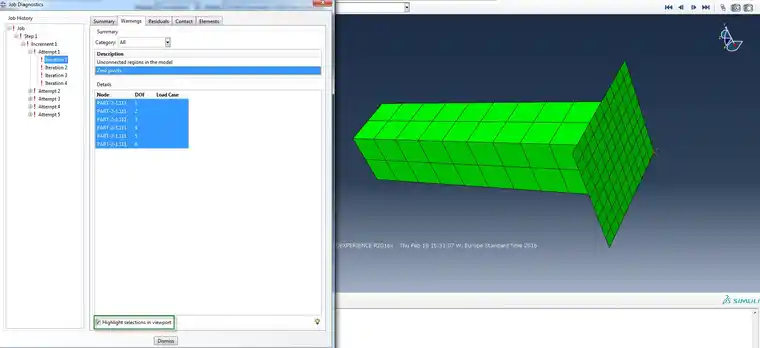
在“警告”选项卡中,用户可以看到数字奇异点和零枢轴的位置(如果适用),这可以使您了解导致这些警告的原因。
在残差选项卡中,可以可视化残差最大的节点。在此节点上寻找收敛困难的迭代,通常会显示出引起问题的模型区域。这个地区有什么意外的事情吗?
在“接触”选项卡中,可以查看最大接触力误差和最大穿透误差的位置。如果联系引起了问题,则可能会显示在哪里。
查看发出警告的时间以及它是否可能指向问题。例如,如果求解器尝试以较大的增量进行首次尝试并给出与负特征值有关的警告,然后缩减时间增量并在下一个增量中获得收敛而没有任何困难或警告,则警告很可能是只是尝试过大时间步长的结果。如果警告消息重复出现,并且重复出现削减现象,则可能表明存在稳定性问题(请参见第6点)。
一些警告是非常具体的,其他警告可能是由不同的根本原因引起的,需要更多的经验来解决问题。
不收敛的原因之一是边界条件不足。边界条件不合理会导致局部极端变形。模型也可以是受限的。在约束不足的情况下,并非所有的刚体运动都被抑制,从而导致一个或多个自由度为零的刚度,并且通常为零轴警告。过度约束也容易引起零轴警告。尽管Abaqus会检查过度约束并尝试解决它们,但并非总是可能的,例如,如果过度约束由于接触而在一段时间后开始发生。建议检查所有与过度约束有关的警告消息。不要以为Abaqus会正确解决过度约束,而是自己正确定义约束。
接触也是促成融合困难的主要因素。想一想,这并不奇怪,因为接触的开始使力-位移关系不连续,这增加了用牛顿法寻找解决方案的难度。这就是为什么在接触改变时Abaqus使用单独的严重不连续迭代的原因。
接触不收敛的一种可能来源是接触的初始状态。如果问题取决于触点的稳定性,并且最初不存在触点,则仿真可能会出现启动困难。尤其是在使用载荷控制的情况下:基本上,载荷会施加到没有刚度的物体上,并且会发生刚体运动。(最初)使用位移控制来确保发生接触通常可以解决收敛问题。Abaqus还提供接触稳定功能,以帮助在接触之前自动控制刚体在静态问题中的运动。
这可以通过使用自动稳定在触点控件中定义。必须指定在交互定义中使用接触控件。通过自动稳定功能,当表面彼此靠近但不接触时会施加阻尼,因此存在被加载部件位移的阻力,并且刚体运动不再可能。因为这是为了允许表面接触,所以在应用阻尼的过程中,默认将阻尼降低到0。建议检查粘性耗散是否太大,例如将ALLSD与ALLIE进行比较。也可以应用第6点中提到的解决不稳定性的技术。
接触不收敛的另一个潜在原因是没有为实际接触的表面定义接触,这可能导致不切实际的结果,非常大的变形和不收敛。自接触例如可以容易地被忽略。当使用Abaqus强大的常规联系方式时,通常不会发生这种情况。
当材料的应力在应变增加时不增加(刚度不是正值)时,会发生收敛问题。当使用包含损坏的实验数据来定义模型而不包含损坏模型时,可能会发生这种情况。检查模型中的(最大)应力和应变,以查看是否预期会发生损坏。
如果使用Abaqus用于超弹性模型的材料拟合选项,则材料的稳定性可能会受到限制。通过右键单击材料并选择“评估”,可以查看由Abaqus计算的稳定性极限。
当使用塑性材料模型并且载荷达到定义的曲线的末端时,Abaqus用一条水平线外推曲线:(塑性)应变可以增加,但是应力却不能(完美的塑性)。在这种情况下,刚度为零。如果这发生在单个元素中,则仿真通常会毫无问题地运行。当模型的大部分经受完美的塑性处理时,可能会成为问题。这通常表明材料的负载太大。
不收敛的最常见原因可能是不稳定。模型开发的原则之一是,模型不应比描述感兴趣的行为所必需的更为复杂。考虑到这一点,通过假设模型在过程缓慢时可以静态运行来降低模型的复杂性似乎是合理的。但是,有趣的是,这种简化会使模型更难求解。通常,负载下材料的行为由牛顿第二定律描述:
如果假定为静态行为,则加速度等于零,因此所有力的总和必须等于零:存在力平衡。当系统从一个平衡状态转移到下一平衡状态并且所有状态之间也处于平衡状态时,静态假设有效。但是,总是这样吗?
以两个零件最初不接触负载控制为例。为什么现实中可能出现这种情况?因为加载零件的初始位移将由其惯性决定。惯性(我们已经简化的效果)实际上可以解决问题。包括某种惯性或阻尼效应通常可以帮助获得收敛解。有几种方法可以做到这一点。
在步骤定义中,可以选择自动稳定,例如默认情况下指定耗散的能量分数。
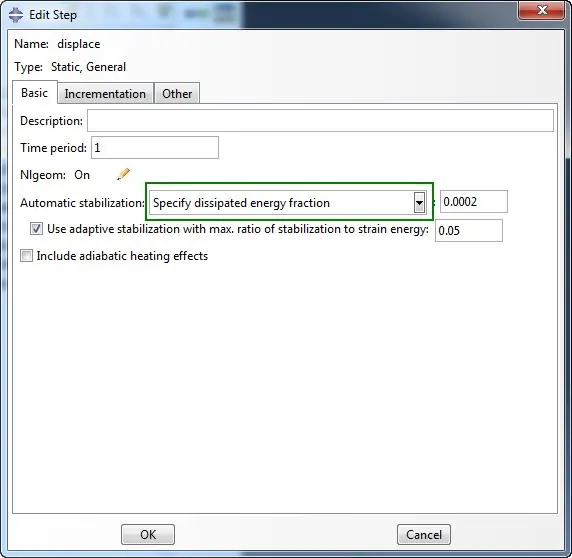
这会向模型中的所有节点施加与节点位移除以时间步长成比例的额外粘性力,这具有稳定作用。检查粘性耗散是否不太大,例如将ALLSD与ALLIE进行比较。
一种替代方法是使用动态隐式step。可以选择准静态应用。
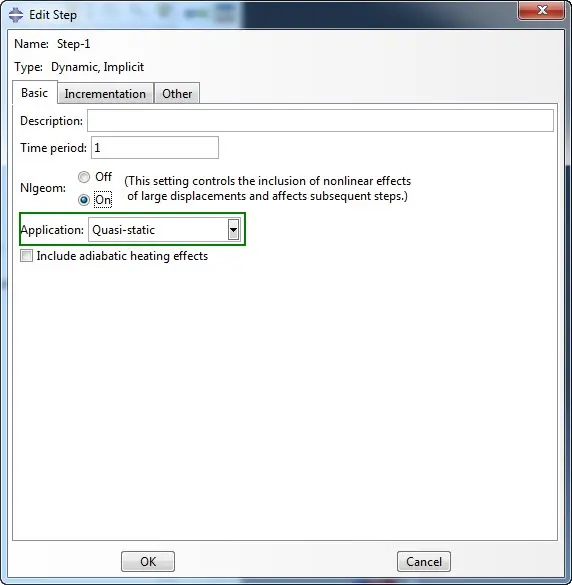
这使用了Euler Backward方案,该方案具有基于实际质量的粘性效果。在这种情况下,解决了与时间有关的问题,因此时间范围应该合理。检查动能相对于内能是否较小。
尝试显式。尽管模拟可能会花费很长时间,但在某些极端非线性的情况下,使用Abaqus / Standard来获得收敛的解决方案只是不现实的。使用Abaqus / Explicit,至少可以确定您不会出现任何收敛问题。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















