















































软件

产品


序言
ISO(国际标准化组织)是全球各个国家标准组织的联合会(ISO member bodies)。国际标准的准备工作通常由ISO技术委员会执行。每一个成员都有志于成为它的分支,这样就有权利派驻代表进国际标准组织。国际组织,政府,非政府组织都会和ISO保持联络,也会参与标准的准备工作。ISO与国际电工委员会(IEC)在所有重要的电气标准方面有着密切的合作。
国际标准依照ISO/IEC规范在第二部分(Part 2)草拟。
技术委员会的主要工作是准备国际标准。草拟的国际标准由每一个成员依次投票决定是否录用。录用标准为至少得到75%的票数。
令人兴奋的是,此文档的一些基本原理可以被用做专利的主体部分,ISO不会追究任何与之相关的标识和这些专利的责任。
ISO11898-5是由ISO/TC22,道路汽车,下属委员会 SC3,电子电气设备。
ISO 11898 由以下部分组成,在标题道路汽车 ——控制器局域网络(CAN)下:
-----1部分:数据链路层和物理信号理论
-----2部分:高速介质访问单元
-----3部分:低速,容错和媒体专用接口
-----4部分:触发时间通信
-----5部分:低功耗模式下的高速访问介质单元
简介
ISO11898于1993年第一次出版,它涵盖了CAN的数据链路层和高速物理层。
复习和调整ISO11898系列:
----1部分:描述数据链路层包括逻辑链接控制(LLC)子层和介质访问控制(MAC)控制子层以及物理信号传输(PLS)子层。
----2部分:定义高速介质访问单元(MAU)
----3部分:定义低速,容错和介质访问单元(MAU)
----4部分:定义时间触发通信。
----5部分:定义高速介质访问单元(MAU)的功耗模式
ISO 11898-1和ISO 11898-2已经取消并被ISO 11898:1993替代。
道路汽车-----控制器局域网络(CAN)
第5部分:
低功耗模式下的高速介质访问单元
1.适用范围
ISO 11898的这部分规定CAN的物理层传输速率达到1Mbit/S以供道路汽车适用。这部分按照ISO/IEC 8802-2描述了介质访问接口单元的功能和媒体专用接口的特征。
ISO 11898的这部分体现了ISO 11898-2的扩展,即满足低功耗的曾经的新功能。
物理层按照ISO 11898与ISO 11898-2实现了兼容,但是重新定义了ISO 11898的一部分。物理层按照ISO 11898和ISO 11898-2共同在一个网络里执行。
2.引用标准
以下引用的文档对此篇文档而言是不可或缺的。对于标注日期的参考目录,仅适用于引用过的版本。若引用的文件不标日期,则以最新版的引用文件(包括修正版)作为参考文件。
ISO 7637-3,道路汽车-----来自传导和偶合的电气干扰---第三部分:电容电感形成的电气瞬态耦合除了供电线(supply lines)普通线路(lines)也可以形成。
ISO 11898-2:2003,道路汽车—控制器局域网络(CAN)-----第2部分:高速介质访问单元。
3.术语和定义
对于本文档,应用ISO11898-2里的术语和定义,如下:
1.%2 VCC
<CAN节点>总线传输器的物理层电源电压同时也是可选择(非标配)的分裂终端(split )的电压Vsplit。
注释:VCC的典型电压为5。
2.%2 分裂终端电压Vsplit
<CAN节点>分裂终端的输出电压,支持对地的模块信号输出。
3.3传输时间 Tprop
<CAN节点>信号传输时间的测量方法为:从MAU的输出信号(TXD)的边沿开始到输入信号(RXD)的同一边沿。
3.4唤醒过滤时间Twake
<CAN节点>CAN节点被强制唤醒后在总线上CAN_H,CAN_L发出的一个显性信号的持续时间。
3.5 唤醒模式(wake-up pattern)
<CAN节点>由满足唤醒过滤时间Twake触发的一个或多个连续显性总线电平,每一个总线电平被单独接收。
注释:在ISO 11898中的图形 电压(Voltage)+→-表示电流从正极流向负极。
4.符号和缩写术语
对于此文档,符号和缩写术语按照ISO 11898-2执行。
5.低电压模式的介质访问单元(MAU)的功能描述
5.1概述
对已两线制差分总线以下描述可用,总线电平值,电阻,电容和网络终端,如例7里的描述。
5.2物理层说明
如图1所示总线被终端网络A终端网络B所终结。这些终端的作用是抑制反射。
除了这种抑制反射最优的终端结构外,在传输速率和拓扑结构受限的情况下,集中式信号终结也是可行的构造。

图1 推荐的电气互联方式
如图示1和图示2是高速介质访问单元的两种不同的终结模式。
----------通过CAN_H和CAN_L信号之间的电阻终结。
---------通过两个同阻值的信号电阻串联的分列式终结,这种方式的电阻中心线通过电容连接到地,同时直接连接到专用Split端口。
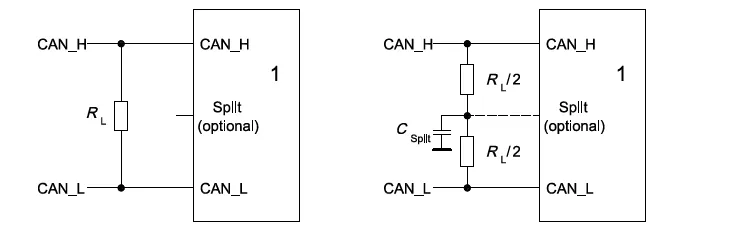
图2 终端变式,单电阻终结和分裂式终结
为了支持低功耗功能,两种不同的操作方式定义如下:
------正常模式:正常模式的操作在ISO 11898-2定义。
------低功耗模式:在 ISO11898 的此部分定义。
5.2.2 正常模式期间的总线电平
总线只能同时处于两种逻辑状态中的一种,隐形或者显性(如图3)。
当总线上所有CAN节点关闭时,总线处于隐性状态。在此状态下,总线上的平均由终端和每个CAN节点的高内阻的接收电路产生。在隐性状态,Vcan_l和Vcan_h为平均电压,此电压大小由CAN终端决定。此时,Vdiff应当小于最大阈值。当总线闲置(idle)或者传输隐性位时,总线呈隐性状态。图3阐明了允许的最大总线隐性差分电压。通常,此差分电压为0伏。
一般认为使用可选分裂式终端电压Vsplit能使总线的隐性状态稳定。此物理层的输出电压按照ISO 11898的此部分(第五部分)执行,应该直接连接到两个串联的终端电阻的中间。每当物理层接收器偏置电压不为2.5V,可选电压 Vsplit将浮动。
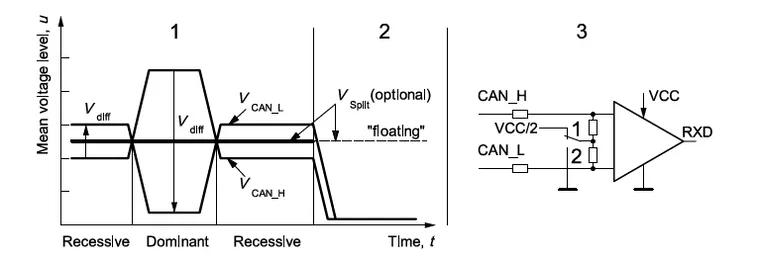
注释:1:正常模式 2:低功耗模式 3:简化收发器偏差执行(simplified transceiver bias implementation)
图3 物理位陈述和简化偏差执行
如果至少一个节点的总线驱动开启,该节点将发送一个显性位到总线。这会在总线终端产生电流,从而在两根总线上形成电压差。差分电压大于最小的显性阈值则代表显性态。显性状态会覆盖隐性状态,并传输显性位。
显性状态和隐性状态由线上的差分电压转化决定。这个显隐性状态相当于接收比较器上的显性和隐性电压。
仲裁期间,多个CAN节点可以同时发送显性位。在这种情况下,Vdiff会超过单个操作的Vdiif。单个操作意味着总线仅被一个节点驱动。
5.2.3 低功耗模式的总线电平
低功耗模式期间,总线驱动器被完全关闭。在低功耗模式期间,通过物理层主动驱动一个差分电压到总线上几乎不可能。相对应的,在正常模式下,总线线路会被拉到地信号模块,通过接收器内部高阻抗的电阻Rin。因此,低功耗操作期间没有激活的VCC电压的要求。
可选分裂终端电压(VSpilt)此种情况(低功耗模式)是关闭的,并且呈高阻态(浮空)以防止总线被拉到某一确定的状态。
从物理层的角度来看,仅有两个定义了的操作条件(正常模式,低功耗模式)是可能的。每当产生总线信号,正常模式就会有个VCC/2的偏压。每当系统关闭,低功耗模式的偏压为GND。如图3.
5.2.4 唤醒脱离低功耗
低功耗期间,物理层可以(可选)监视总线线路CAN_H和CAN_L上的唤醒事件。实现此项功能需要利用差分总线上的比较器来监视总线。如果总线出现一个或多个满足最小Twake的连续的显性电平被接收器单独接受,总线将会被唤醒。
5.2.5无动力节点系统
为了允许不受干扰的CAN通信的系统,即两三个节点有意无动力(比如点火控制的模块),与此同时其他节点继续正常参与通信。要求这些无动力节点对总线电平的影响尽可能的小。这就需要此时无动力的收发器在正在通信总线里拥有尽可能低的漏电流。无动力收发器漏电流越低,相应部分的网络性能越好。
表4表明了应用(永久使用或者临时不使用的)的最大漏流电流参数容限(永久使用的节点)和应该最大限度的减少漏电流参数(临时不使用的)。
注释:与仍有电压的低功耗模式形成对照的是,无动力意味着在物理层面电源已经被切割。
6.Vsplit一致性测试
6.1概述
大部分正常模式的一致性测试都在ISO 11898-2中有规定,除了一些可选电压的功能和低功耗模式的动作。
例7 这个图表和公式展示的规定的电气参数必须被确认。
6.2Vsplit输出功能
6.2.1 概述
Vsplit是一个可选的稳定总线隐形状态的输出电压。当此功能实施时,其输出情况应该按照一下条款测量。
8.%2.%3 正常模式Vsplit
正常模式期间,输出电压Vsplit传送一个VCC/2电压。
根据表6,需要调整电阻R,使输出+500uA电流到地(如图4 原理图A)和-500uA电流到VCC(图4 原理图B),同时要求输出电压Vsplit在限值范围内。
在空载条件下(图4 原理图C),输出电压应该按照表6要求,使用一个阻值大于1MΩ的负载电阻。

图4 正常模式下Vsplit的测量
9.%2.%3 低功耗模式Vsplit
低功耗模式下,可选输出Vsplit应该浮空(如图5)。漏电流由表6定义。
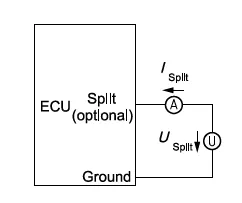
图5 低功耗模式下 Isplit漏电流的测量
6.3低功耗模式下的输出电压
低功耗模式期间,CAN_H和CAN_L应该通过总线接收器网络输入电阻Rin被拉向GND(图6)。CAN_H和CAN_L的电平应当与表8里的一致。

图6 低功耗模式下 Vcan_l和Vcan_Hd的测量
6.4低功耗模式下的内阻
低功耗模式期间,CAN_H和CAN_L应该通过内部输入电阻被拉向GND(图7),按照表9。
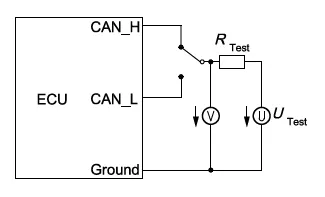
图7 低功耗模式下Rin的测量
测试电路的应用电压Utese可以基于分压方式计算利用Rtest计算出Rin,如下:
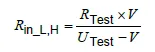 U是电压源,V是电压表
U是电压源,V是电压表
6.5正常模式的传输延时
假如链接到了物理层的管脚RXD(接收数据,串行)和TXD(发送数据,串行),信号传输时间需要按照图8所示进行测量。表11规定了传输时间和Rl,Cl,ftxd,和Crxd。

图8 正常模式下Tprop的测量 (Tprop传输时间)
6.6低功耗模式的唤醒过滤时间
为了抑制远程总线唤醒中非预期的唤醒事件,需要实施一个确定的显性过滤时间。如图9。
按照表11,当显性脉冲宽度小于Twake(min)时,处于测试状态的设备标志为一个唤醒条件。而当当显性脉冲宽度大于Twake(max)时,处于测试状态的设备将此标志为一个唤醒条件。当显性脉冲的长度介于Twake(min)和Twake(max)时可能引起唤醒,这取决于过滤传播。
根据系统的目标速率,实行的个体时间阈值可以调整。但是必须在由表11定义的最小值和最大值范围内。
测试应当按照表13的规定范围内的完整共模电压进行。
表11里定义里,Rl,Ucm,Tpulse和I的值。

图9 低功耗模式下唤醒过滤时间测量
6.7正常模式下总线对称驱动
出于电磁兼容(EMC)的原因,CAN_H和CAN_L的驱动级必须对称,特别在隐性位变为显性位和显性位变成隐性位期间,需要一个示波器以确认所谓的共模总线电压在限值范围内,包括在隐性位时间,显性位时间,和位传输时间均按照表5要求。(图10)
表5 定义了 Rl,Ftxd和Csplit,并且Vsym=Vcan_h+Vcan_l
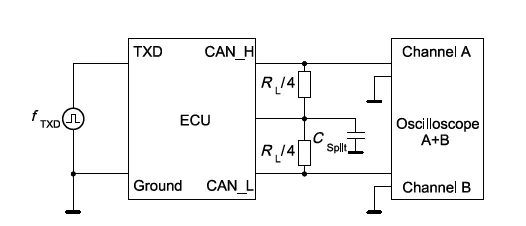
图10 总线驱动对称Vsymd的测量
6.8 输入漏电流,无动力设备
一个无动力设备不应该干扰其余网络的通信。表4定义了满足要求的最大的漏电流,Ican_h和Ican_l以及Ubus和Usupply。(如图11)
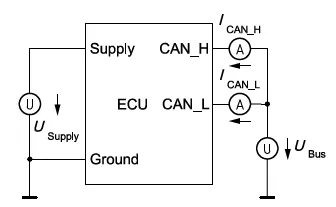
图11 无动力设备的输入漏电流的测试
7.高速介质访问单元(HS-MAU)的电气规格
7.1物理介质附件子层规范
7.1.1概述
所有独立的物理层实施规范都在表1~表10中给出了。这些表里的参数规范应当贯穿整个操作温度,按照说明实施,每一个个体的CAN节点都如此。
7.1.2总线电平
7.1.2.1共模电压
当所有的CAN节点都被连接到被正确终结的总线上,应用表1 到表6里规定的参数。
7.1.2.2 耦合干扰
CAN_H和CAN_L可以忍受的耦合干扰容限在ISD 7637-3中被定义。测试脉冲为3a和3b。
7.1.3 可选的分裂输出电平
可选的分裂输出电平在表6中进行了阐述。
表1—正常模式下显性状态的总线电压参数
| 参数 | 符号 | 单位 | 值 | 条件 | ||
| 最小 | 正常 | 最大 | ||||
| 总线共模电压 | Vcan_h | V | --- | 2.5 | 12 | 测量时每个CAN节点的 |
| Vcan_l | V | -12 | 2.5 | ---- | ||
| 总线差分电压 | Vdiff(a) | mV | -12 | 0 | 12 | 测量时每个CAN节点连接到总线上 |
| (a)隐性状态期间差分电压由所有CAN节点的输出状态决定,因此Vdiff电压大约等于0(如表8)。最小值由要求决定,这个要求是单个的总线驱动器代表显性的最小电压值为 Vdiff=1.2V。 | ||||||
表2---正常模式下显性状态的总线电压参数
| 参数 | 符号 | 单元 | 值 | 条件 | ||
| 最小 | 正常 | 最大 | ||||
| 总线共模电压(a) | Vcan_h | V | ---- | 3.5 | 12 | 测量时每个CAN节点的单独接地 |
| Vcan_l | V | -1.2 | 1.5 | ----- | ||
| 总线差分电压(b) | Vdiff | V | 1.2 | 2 | 3 | 测量时每个CAN节点连接到总线上 |
| (a) Vcan_h的最小值等于Vcan_l的最小值加上Vdiff的最小值。Vcan_l的最大值由Vcan_h的最大值减去Vdiff的最小值。 (b) 总线负载随着网络CAN节点增加而增加,因为总的Rdiff的阻值随之减少,Vdiff增加。Vdiff的最小值决定了总线上允许的CAN节点的数量。Vdiff的最大值由仲裁的上位限值确定。 | ||||||
表3---低功耗模式下显性状态的总线电压参数
| 参数 | 符号 | 单位 | 最小 | 正常 | 最大 | 条件 |
| 总线共模电压(a) | Vcan_h | V | --- | 0 | 12 | 测量时每个CAN节点的单独接地 |
| Vcan_l | V | -12 | 0 | ----- | ||
| 总线差分电压 | Vdiff | mv | -120 | 0 | 12 | 测量时每个CAN节点连接到总线上 |
| (a)低功耗模式下差分总线电压由所有的CAN节点的输出决定。Vdiff约等于0(如图8)。最小值由要求决定,这个要求是单个的总线驱动器代表显性的最小电压值为 Vdiff=1.2V。 | ||||||
表4---总线输入电流,无动力器件
| 参数 | 符号 | 单位 | 最小 | 正常 | 最大 | 条件 |
| 输入漏电流 | Ican_h | uA | 0 | ---- | 250(a) | Ubus=5V,Usupplu=0V(b) |
| Ican_l | uA | 0 | ----- | 250(a) | ||
| (a). 同一网络里为保证通行的正常进行,无动力的器件的输入漏电流一定要尽可能的小。(如5.25)) 无动力器件的漏电流必须小于25uA。全面规定漏电流的范围有利于永久使用的CAN节点的通信。 | ||||||
表5---正常模式,对称驱动
| 参数 | 符号 | 单位 | 最小 | 正常 | 最大 | 条件 |
| CAN_H+CAN_L的对称驱动 | Vsym | VCC | 0.9 | 1 | 1.1 | RL=120ohm/tol.<1%,Vsplit=4.7nF/5%,Ftxd=250kHZ,示波器输入阻抗<=20pf/1MΩ |
表6-----可选,分裂输出电压
| 参数 | 符号 | 单位 | 最小 | 正常 | 最大 | 条件 |
| 正常模式,负载条件分裂输出电压 | Vsplit_I | VCC | 0.3 | 0.5 | 0.7 | -500uA<Isplit<500uA |
| 正常模式,空载条件分裂输出电压 | Vsplit_u | VCC | 0.45 | 0.5 | 0.55 | Rmeasure>=1MΩ |
| 低功耗模式,分裂漏电流 | Isplit | uA | ----- | 0 | 5 | -12V<Usplit<12V |
7.2CAN节点
7.2.1概述
在CAN节点未连接到总线的情况下,每个CAN节点的CAN_L和CAN_H节点应当按照表7给出的参数进行测试。
表7----CAN 节点的Vcan_l和Vcan_h和可选的Vsplit的最大等级
| 电池电压(V) | 符号 | 电压Vmin | 电压Vmax |
| 14 | Vcan_h | -27V | 40V |
| Vcan_l | -27V | 40V | |
| Vsplit | -27V | 40V | |
| 28 | Vcan_h | -58V | 58V |
| Vcan_l | -58V | 58V | |
| Vsplit | -58V | 58V | |
| 42 | Vcan_h | -58V | 58V |
| Vcan_l | -58V | 58V | |
| Vsplit | -58V | 58V | |
| 注释1. 静止操作下性能不能保证 注释2. 不论多久的时间,总线驱电路不会被损坏 | |||
每个CAN节点的CAN_L和CAN_H节点应当按照表8和表10给出的参数进行测试。测试方法按照例6和ISO 11898-2:2003的例6进行。
表8----CAN节点隐性状态的DC参数
| 参数 | 符号 | 单位 | 最小 | 正常 | 最大 | 条件 |
| 正常模式,总线输出电压 | Vcan_h | V | 2.0 | 2.5 | 3.0 | 空载(a) |
| Vcan_l | V | 2.0 | 2.5 | 3.0 | ||
| 低功耗模式,总线输出电压 | Vcan_h | V | -0.1 | 0 | 0.1 | 空载 |
| Vcan_l | V | -0.1 | 0 | 0.1 | ||
| 总线差分输出电压 | Vdiff | mV | -500 | 0 | 50 | 空载 |
| 正常模式,差分输入电压(b) | Vdiff_N | V | -1.0 | ---- | 0.5 | c,d |
| 低功耗模式,差分输入电压(d) | Vdiff_L | V | -1.0 | ----- | 0.4 | c,d |
| a. a.出于EMC考虑,CAN_H和CAN_L之间需要一个确定的匹配值(如表5),因此,当一个CAN线上表现出最小值时,其他的CAN线不能表现出最大值。 | ||||||
| b.接收端显性位和隐性位的阈值各确保了0.3V和0.5V的噪声抗干扰能力。在实际应用中,当CAN_H和CAN_L并入了更低的负载电阻,更低的显性值也是有意义的。(电源的电容值是根据总线驱动器的内阻驱动与总线负载电阻并联的显性位推论出来的。) | ||||||
| c.接受端隐性位的范围 | ||||||
| d.接受必须确保共模电压分别在表1 和表2的范围内。 | ||||||
表9-----CAN节点的总线输入电阻
| 参数 | 符号 | 单位 | 最小 | 正常 | 最大 | 条件 |
| 差分内阻 | Rdiff | kΩ | 10 | ---- | 100 | 低功耗和正常模式,空载(a) |
| 内部电阻 | Rin | kΩ | 5 | ---- | 50 | 正常,低功耗模式 |
| a 对于有完整终端电阻的CAN节点,RL被看作CAN_H和CAN_L的差分阻抗而不是Rdiff。 b CAN_H和CAN_L的Rin必须拥有几乎一致的值。之间的误差应该小于3%。 | ||||||
表10—CAN节点显性状态的DC参数
| 参数 | 符号 | 单位 | 最小 | 正常 | 最大 | 条件(a) |
| 正常模式,总线输出电压(b) | Vcan_h | V | 2.75 | 3.5 | 4.5 | 负载Rl/2 |
| Vcan_l | V | 0.5 | 1.5 | 2.25 | ||
| 正常模式,差分输出电压 | Vdiff | V | 1.5 | 2.0 | 3.0 | 负载Rl/2 |
| 正常模式,差分输入电压(c) | Vdiff | V | 0.9 | --- | 5 | 负载Rl/2(d) |
| 低功耗模式,差分输入电压 | Vdiff | V | 1.15 | ----- | 5 | 负载Rl/2(d) |
| a负载指CAN_H和CAN_L之间的负载。对于没有完整终端电阻(正常使用)的CAN节点,这个电阻是Rl的一半。对于拥有完整终端电阻的CAN节点,这个电阻即是Rl电阻。此种情况下,RL被当做CAN_H和CAN_L的Rdiff电阻。 b. 出于EMC考虑,CAN_H和CAN_L之间需要一个确定的匹配值(如表5).因此,当一个CAN线上表现出最小值时,其他的CAN线不能表现出最大值。 c. 接收端显性位和隐性位的阈值各确保了0.3V和0.5V的噪声抗干扰能力。在实际应用中,当CAN_H和CAN_L并入了更低的负载电阻,更低的显性值也是有意义的。(电源的电容值是根据总线驱动器的内阻驱动与总线负载电阻并联的显性位推论出来的。) d. 接收端的显性位范围。必须确保接收端共模电压的范围分别符合表1和表2. | ||||||
10.%2.%3 电压范围说明
负载情况在表1到表10已经被定义。图12到图15阐明了Vcan_h和Vcan_l的可用电压范围。
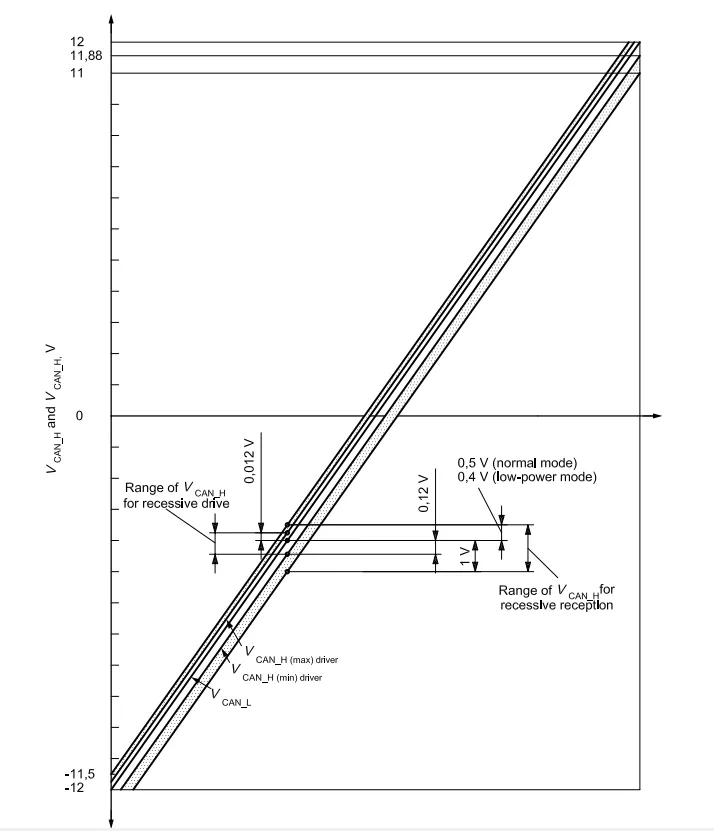
图12—正常模式期间如果Vcan_l在总线共模电压范围内从最小变到最大,Vcan_h的可用电压范围就可以监控总线的隐性状态和断开的CAN节点。
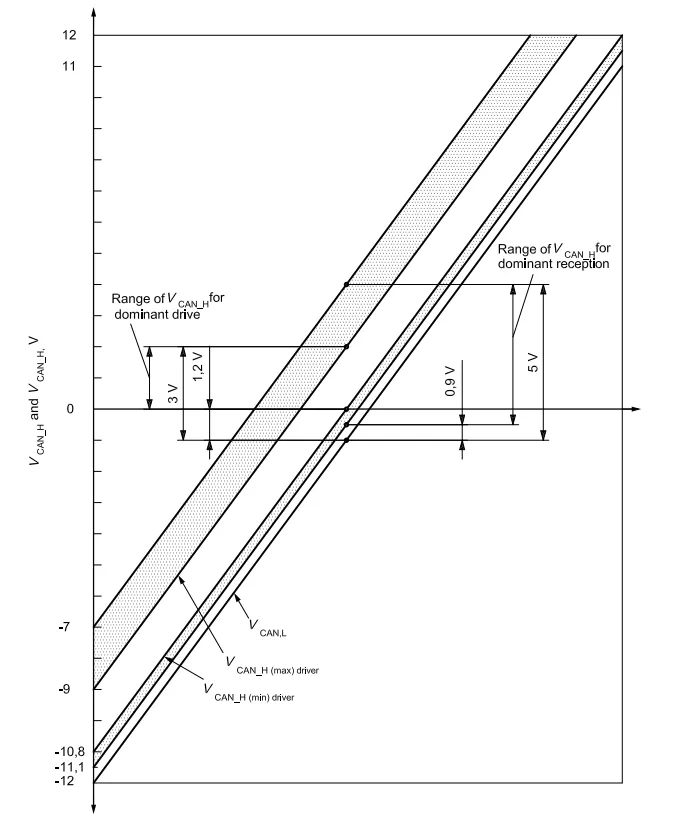
图13—如果正常模式期间总线共模电压Vcan_L的值从最小到最大变化,Vcan_h的电压变化范围就可以监控显性状态和断开的CAN节点。
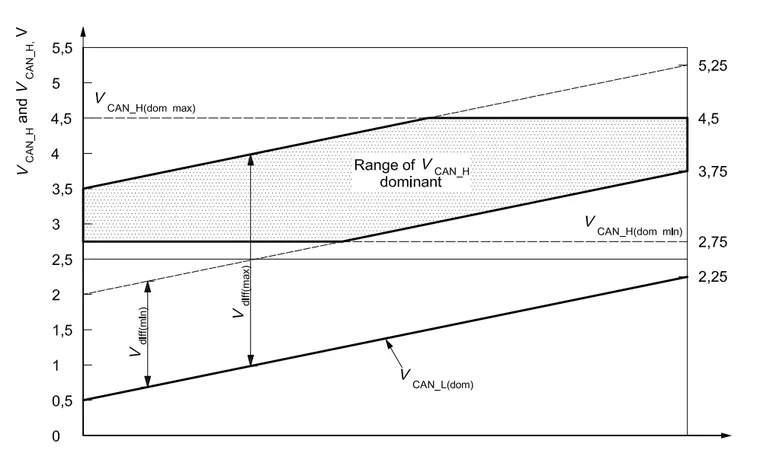
图14—正常模式期间如果Vcan_l电平从最小值到最大值范围变化,从总线的CAN节点上断开的CAN显性状态的Vcan_h的电压变化范围。
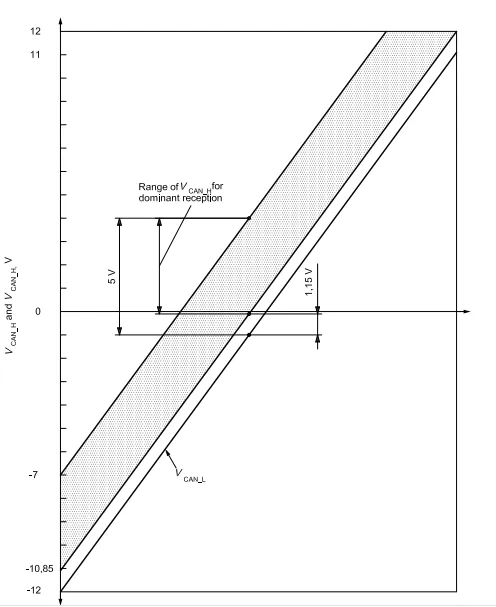
图15--低功耗期间如果Vcan_l在总线共模电压范围内从最小变到最大,Vcan_h的可用电压范围就可以监控总线的隐性状态和断开的CAN节点。
7.2.3 交流电(AC)参数
表11中的参数需在每个CAN节点的CAN_L和CAN_H的管脚上进行测试,测试标准按照按照11989-2:2003测试用例6.6。6.5,6.6在ISO118981中进行描述。
表11-脱离总线的CAN节点的AC参数
| 参数 | 符号 | 单位 | 最小 | 正常 | 最大 | 条件 |
| 位时间 | Tb | u | 1 | -- | -- | a |
| TXD到RXD的隐性到显性/显性到隐性的传输延时(b) | Tprop | ns | -- | -- | 255 | 正常模式,负载Rl=120Ω,Cl=100pF,Crxd=15pF,ftxd=250kHZ |
| 唤醒过滤时间,显性总线 | Twake | u | 0.5 | -- | 5(c) | 低功耗模式,Rl=120Ω,Ucm按照表2(最小和最大总线共模电压),I保证差分显性电压按照表2 的规定的可变的脉冲长度,Tpulse-twake(min```Twake(max)) |
| 内部电容 | Cin | PF | -- | 20 | -- | 1Mbit/S(d) |
| 内部差分电容 | Cdiff | pF | -- | 10 | -- | 1Mbit/S |
| a. 最小的位时间(bit time)对应最大的比特率1Mbit/S。比特率的下端取决于协议IC或者一个可选的永久显性电平侦测电路。以防总线被永久的钳为显性。 b. 如果直接连接到TXD/RXD接口,则只能被直接查验。在集成CAN节点内部,这些参数只能被间接测量。 c. 需要注意的是,最大的过滤时间会对与之陪陪的唤醒信号产生影响,特别是在高速波特率中,尤甚。比如,在500kBit/s系统中,一个唤醒信号至少要持续三个连续位时间,以确保能安全通过唤醒滤波。更短的滤波时间会增加总线非预期唤醒的风险,一旦受到噪声的干扰。这个规定是在非预期唤醒的鲁棒性和信号的自主性之间相互妥协的。 d. 以地为参考对CAN_H和CAN_L进行测量。 e. 除了限制内部电容值外,总线连接也应当尽可能降低电感值,这一点对高速位速率而言特别重要。最小的Cin和Cdiff值可以为0,最大值的容限由位时钟,网络拓扑参数L,I和D(如表15,脚注)。如果发生的线反射波在每个有效的CAN节点不能压制显性位的差分电压Vdiff低于0.9V,不能使隐性位的差分电压Vdiff高于0.5V,则总线功能完全得到保证。 | ||||||
6.2 专用媒体接口(MDI)说明,连接器参数。
被用作CAN节点到总线的插头的连接器应该满足表12的说明要求。
表12---连接器参数
| 参数 | 符号 | 单位 | 最小 | 正常 | 最大 | |
| 电压 | Vbat=14V | U | V | ---- | ---- | 40 |
| Vbat=28V | U | V | ---- | ----- | 58 | |
| Vbat=42V | U | V | ---- | ----- | 58 | |
| 电流 | I | mA | 0 | 25 | 80 | |
| 峰值电流(a) | Ip | mA | ---- | --- | 500 | |
| 传输频率 | F | MHZ | 25 | --- | --- | |
| 传输阻抗(b) | Rt | mΩ | --- | 70 | ---- | |
| a. 时间条件:101tb b. 总线差分电压被接收节点确定,接收节点由它和传输节点之间的线性阻抗决定。因此,信号线的传输阻抗受每个节点的总线参数限制。 | ||||||
6.3 物理介质详述
7.4.1终端电阻
应用于终端A和终端B的终端电阻Rl应当遵循表13中的限制。
表13---终端电阻
| 符号 | 单位 | 值 | 条件 | ||
| 最小 | 正常 | 最大 | |||
| Rl(a) | Ω | 100 | 120 | 130 | 最低功耗:220mW |
| a. 因为拓扑结构,120Ω上的位速率和转换速率有偏差是有可能的。无论怎样,每一例去检查电阻值是很有必要的。而且,使用单个中心总线终端也是可能的。在此例中,终端浓缩在一个RL/2功耗至少位440mW的电阻中。此中心终端可以使用两个电阻组成的分裂终端实施,每个电阻为Rl/4,至少220mWgonghao 。 基于5V总线的最大差分电压可以估算出功耗,总线独立于电池应用系统。假如总线线路和电池短路是被支持的话,这最小的需用功率依赖于假定的最大总线电路电压。 | |||||
| 注意:。因为接到总线上CAN_H和CAN_L的所有接收器连的内部差分电阻的缘故,当终端电阻值越小,网络中允许节点的数量越少。 | |||||
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















