















































软件

产品


在CATIA软件DMU KIN模块优雅的做一个运动仿真案例?
如下简单介绍下本案例,运动副添加以及模拟仿真过程
首先分享一下结构树,结构树中有四个子件,其中swingarm指的是中间旋转臂,slider指的是两个做往复式直线运动的零件,FixPART是一个虚拟的
固定基座(由上面的动画,我们可以看到slider滑块上有圆柱凸台插入到大基座的长条孔导轨中,形成滑移运动副,并不太明显,但是这个是关键点)。
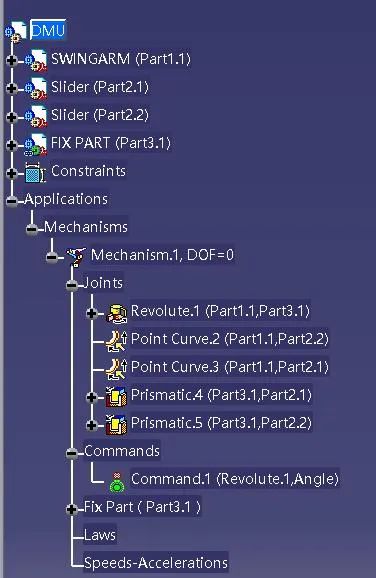
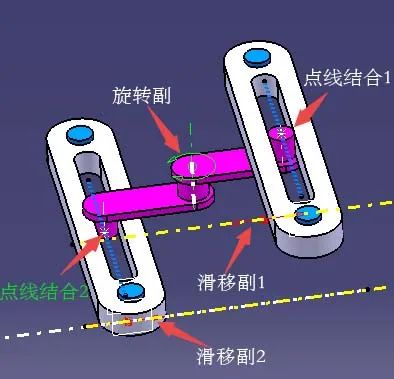
下面的三维图中,结构树上总共添加了5个运动副,swingarm与基座上白色轴线相合的旋转副;swingarm两侧圆柱上的圆心点与slider上长条孔中心线之间的点线结合1,点线结合2;slider上的蓝色凸台与基座滑槽(两条黄色点划线)之间的滑移副1,滑移副2。(在实际操作中,大家经常忽略的就是这个虚拟的Fix基座的构建,另外容易将两个滑移副做成点线结合类型的高副,如果这样的话,机构自由度太多,无法进行运动模拟仿真。)
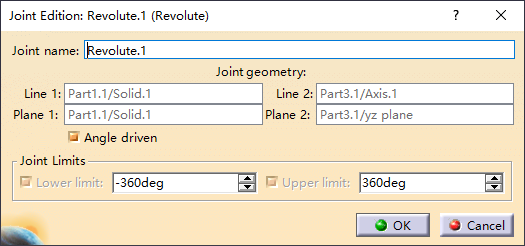
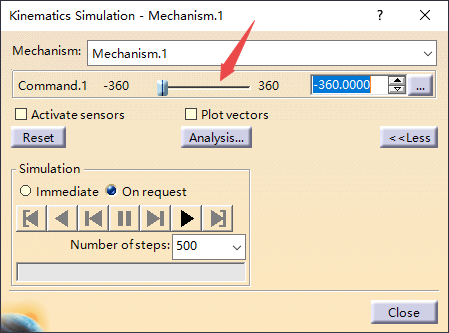
运动副添加完毕,将虚拟的基座FIX PART做为固定件,在旋转副上加一个角度驱动后(如下截图),设定角度驱动范围为-360°到360°(swingarm回转两圈),系统提示可以进行运动仿真。
点击使用命令进行仿真(simulation with commands)后,打开如下对话窗体,拖动滑块到合适位置,点击运行,机构即开始运动模拟。
其实在设计工作中,仿真的动画(animation)并不是重点,重点是我们对杆件机构进行的运动分析,比如运动期间的最小间隙minimal clearance,运动期间的碰撞干涉collision,杆件的速度velocity和加速度 acceleratio与时间time的关系曲线,最后重点来了,学习DMU运动仿真哪家强,CATIA小蚂蚁,不比不知道,一比吓一跳。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















