















































软件

产品


致力于数字孪生体技术的研究与发展通过解决方案和工程化应用造福人类
一、引言
数字孪生体是现有或将有的物理实体对象的数字模型,通过实测、仿真和数据分析来实时感知、诊断、预测物理实体对象的状态,通过优化和指令来调控物理实体对象的行为,通过相关数字模型间的相互学习来进化自身,同时改进利益相关方在物理实体对象生命周期内的决策。
通过数字孪生体模型,可以实现全面监控系统的关键参数,分析系统在非常规条件下的各种性能,如恶劣工作环境、存在加工误差、冲击载荷工况等。利用数字孪生体模型进行虚拟化测试,缩短了测试和分析的时间,降低了测试与分析的成本,并可以根据虚拟化测试结果优化试验参数。因此建立机械产品关键零部件(如连杆)的数字孪生体模型,就具有十分重要的意义。
图1为实现连杆数字孪生体模型的技术路线,主要分为载荷识别、模型降阶和数字孪生体模型建立和部署四部分。
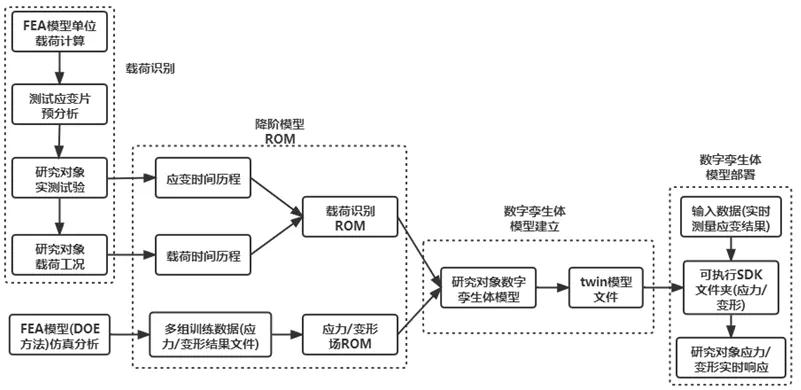
图1 连杆数字孪生体模型技术路线图
二、连杆载荷识别
1、载荷识别原理
在结构线性响应情况下,载荷与变形、变形与应变均是线性关系,故可得载荷与应变是线性关系,如图2所示。True-Load软件基于该性质对线性响应的结构进行载荷识别,如果整体结构中存在局部非线性行为,如螺栓连接和焊缝区域局部塑形变形、结构中存在橡胶件等,该载荷识别方法仍然适用。
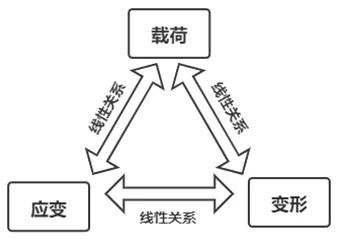
图2 True-Load载荷识别原理
2、载荷识别流程
采用True-Load软件实现工程机械中连杆载荷识别的过程,如图3所示。首先对连杆模型施加单位载荷并求解其应变响应;接着True-Load软件根据单位载荷应变计算结果确认连杆结构上最佳应变片贴片的位置和方向,据此对连杆结构进行应变片贴片;然后进行现场试验并采集应变片的测试结果;最后将试验测得的应变数据读入True-Load软件,通过计算得到连杆在试验过程中相应的动态载荷历程。
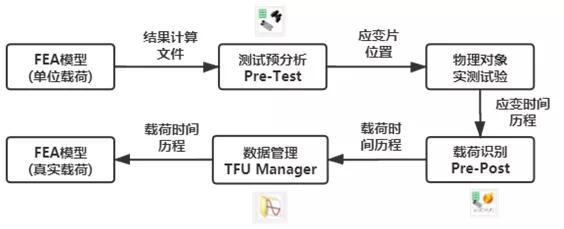
图3 连杆载荷识别流程图
1) 连杆单位载荷工况应变结果求解
在利用ANSYS Mechanical获得连杆单位载荷加载的*.rst结果文件过程中,需要注意两点:其一是连杆限元模型中要在计划贴片区域设置壳单元;其二是该连杆绕Z轴转动,故模型在XY平面内施加单位载荷。模型底端销孔位置施加fixed约束,其余两个销孔,沿着坐标轴X和Y分别施加单位载荷,基本流程如图4所示。
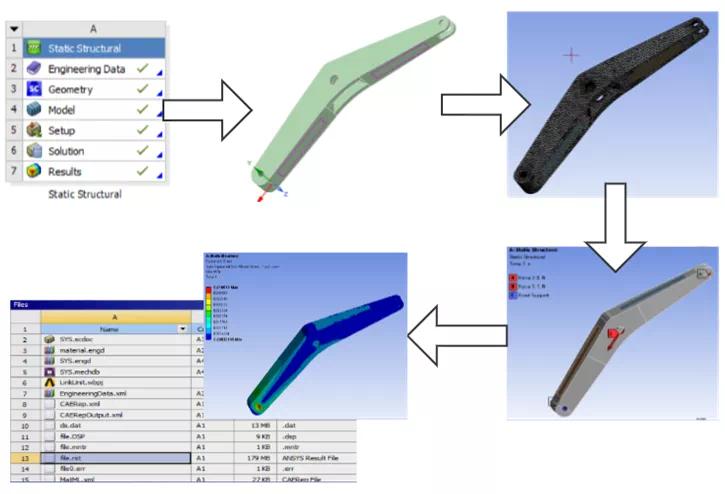
图4 ANSYS Mechanical单位载荷分析过程
2)连杆测试预分析
将包含连杆单位载荷计算的结果文件导入True-Load/Pre-Test中,进行应变片贴片位置预分析,如图5所示。规划出6个应变片最佳位置,用于识别连杆真实载荷。载荷识别过程中,载荷识别条件数C(Condition Number)极为重要,需要保证载荷识别条件数C的数值小于100。
最终确认应变片贴片位置后,把应变片在连杆上的位置坐标导出,并保存在*.csv文件中。实际现场试验中要严格按照csv文件中保存的坐标信息进行应变片贴片。
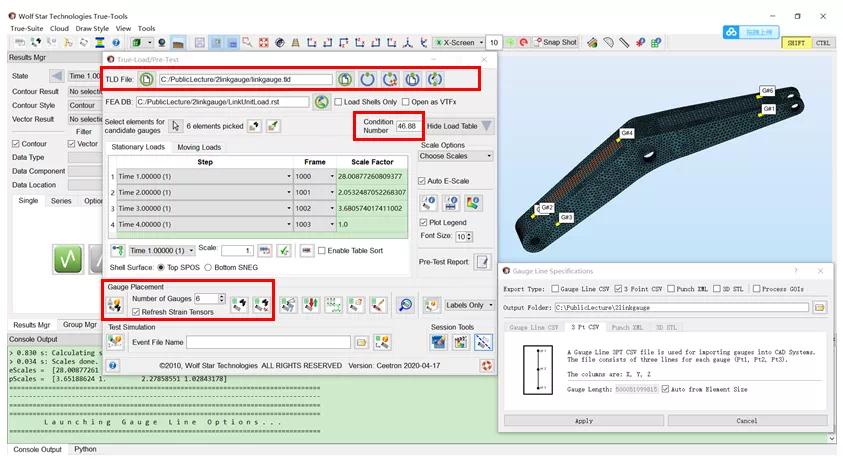
图5应变片测试预分析
3)连杆载荷识别
现场试验做完后,保存应变测试结果。把包含连杆应变片位置信息的*.tld文件,及应变实际测试数据,导入True-Load/Post-Test中,进行载荷识别。生成HTML分析报告,包括图6所示四个载荷步结果,图7所示载荷识别误差(均方根差),图8所示实测应变与识别载荷加载到连杆上的应变之间的误差等内容。同时程序会自动生成*.tfu文件,然后导出包含真实载荷结果的*.csv文件。
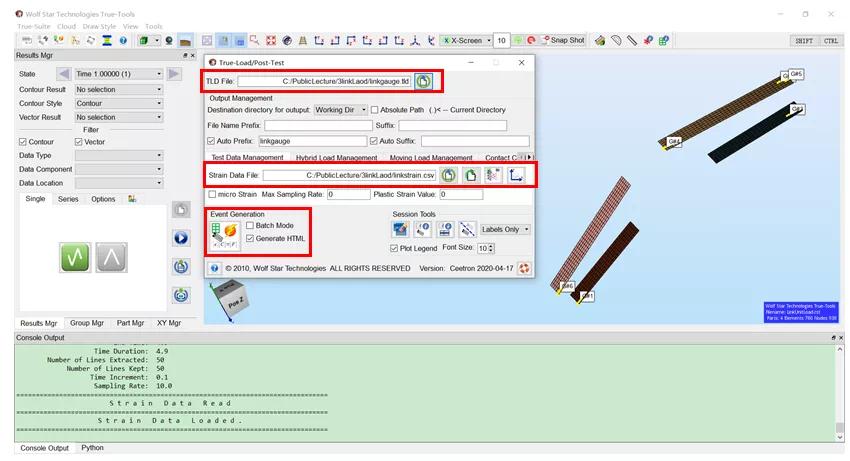
图6连杆载荷识别
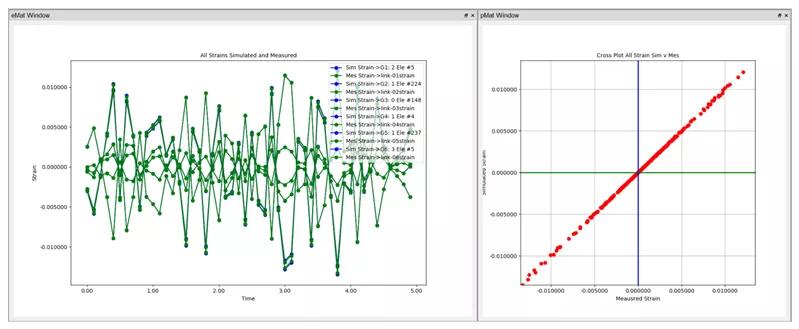
图7 真实应变与仿真应变的相关度
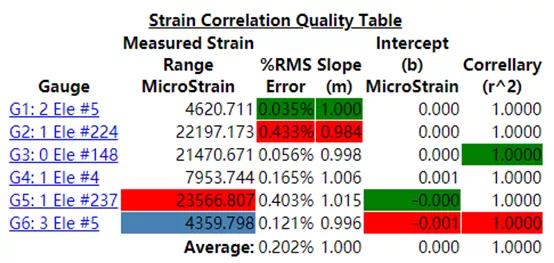
图8 真实应变与仿真应变的误差表
三、连杆模型降阶
1、连杆载荷识别ROM生成
将连杆实测试验中获得的应变测试数据和利用True-Load识别出的真实载荷历程,导入ANSYS Twin Builder 的 Response Surface ROM模块中,基于Response Surface Method(RSM)理论,生成载荷识别ROM,如图9所示。
Response Surface Method即响应面设计,其基本思想为选定多项式函数作为实际响应函数的近似形式,然后再通过一系列实验样本点来确定近似函数中的多项式系数。通过合理地选取实验样本点和迭代策略,来保证近似响应函数能够收敛于真实的响应函数。
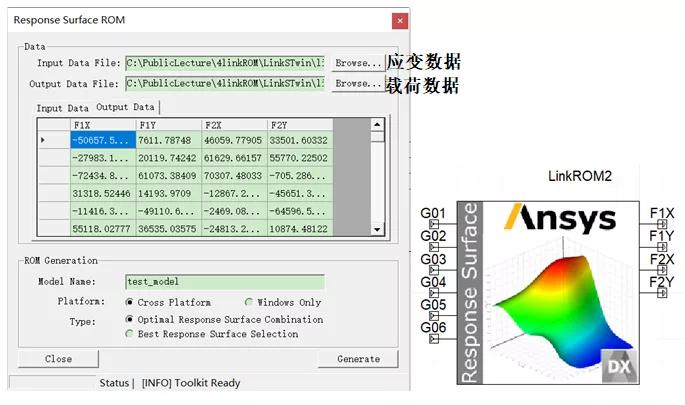
图9 连杆载荷识别ROM
2、连杆应力/变形场Static ROM生成
在ANSYS Mechanical的 Static Structural模块中,首先设置ACT插件StaticROM Pre,利用DOE试验建立多组试验载荷数据作为训练样本,求解并存储载荷数据、应力和变形结果、节点坐标等信息,如图10和图11所示。将上述数据导入ANSYS Twin Builder中的Static ROM Builder模块,依据奇异值分解Singular Value Decomposition(SVD)方法压缩连杆3D模型训练数据,针对选定的训练数据,程序会自动给出满足精度的矩阵压缩阶数,并结合Response Surface Method (RSM)方法生成连杆应力/变形场Static ROM,如图12所示。
其中DOE试验样本的生成采用拉丁超立方抽样方法(Lath Hypercube Sampling Design),该方法是一种从多元参数分布中近似随机抽样的方法,属于分层抽样技术。

图10多组连杆应力/变形训练数据生成1

图11 多组连杆应力/变形训练数据生成2
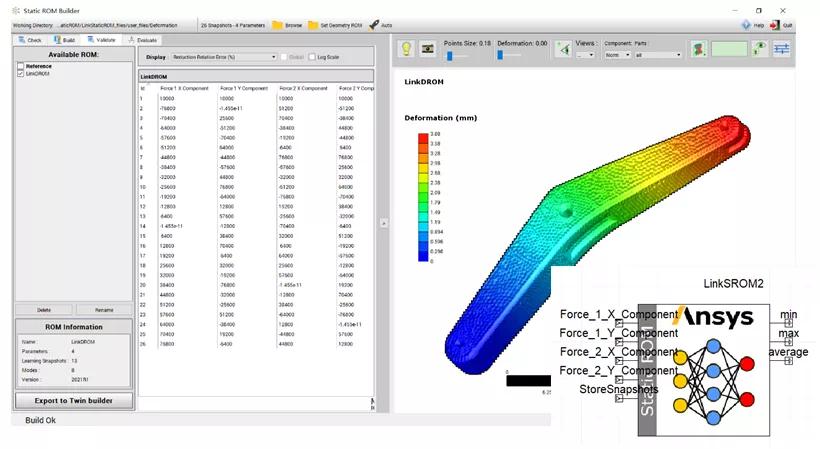
图12 建立连杆Static ROM
四、连杆数字孪生体模型建立
在ANSYS Twin Builder中,将载荷识别ROM输出端和应力/变形场Static ROM输入端进行连接,并设置载荷识别ROM输入端接口和应力/变形场Static ROM输出端接口。输入连杆应变片的测试应变数据后,通过该模型计算,可快速得到连杆整个模型的应力/变形结果。
然后在ANSYS Twin Builder环境中,对该模型进行编译生成twin模型,并输出twin模型文件,以上过程如图13所示。

图13连杆数字孪生体模型搭建及封装
五、连杆数字孪生体模型部署
将输出的连杆twin模型文件和应变数据csv文件导入 ANSYS Deployer中,包含实际采集测试应变的csv文件的输出端与twin文件模型输入端对应连接,建立连杆数字孪生体模型,如下图14所示。经调试求解成功后,利用其Export Python App生成可执行程序SDK文件夹,文件夹中包含的主要内容,如下图15所示。该文件夹通过命令行执行,可完全脱离有限元仿真环境,并获得连杆现实场景中应力和变形结果的实时响应,如图16和图17所示。其中图17为连杆载荷历程对应的最小、最大和平均应力的不同结果曲线。
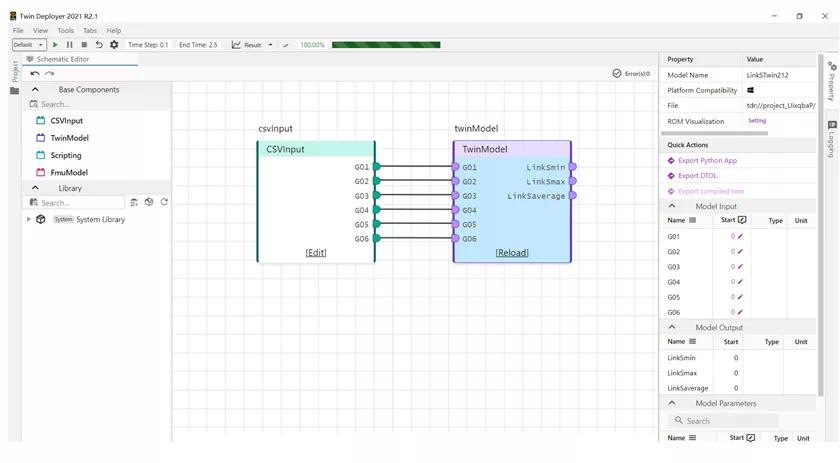
图14 建立连杆数字孪生体模型
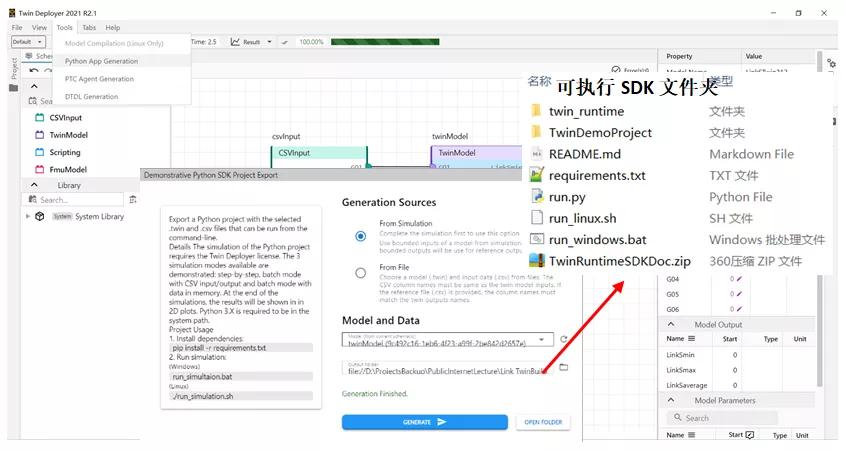
图15 可执行SDK文件夹生成
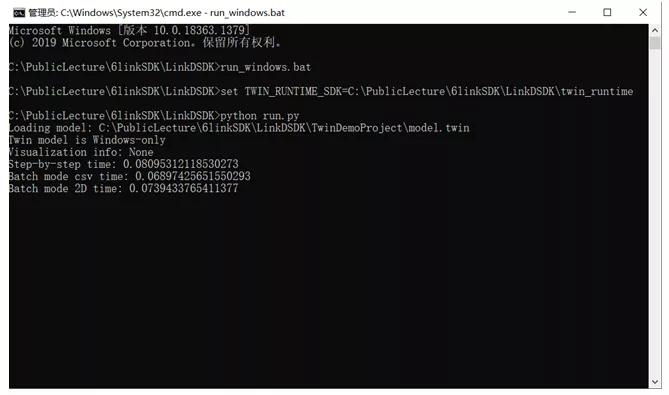
图16 运行中的可执行程序SDK文件夹
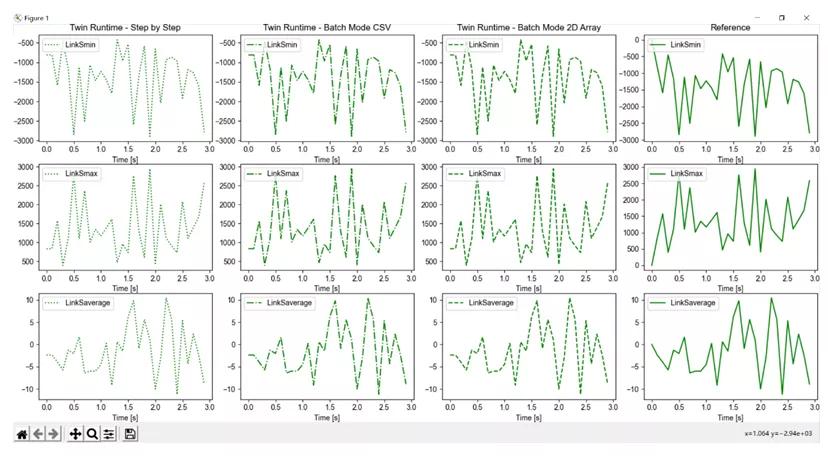
图17 SDK文件夹运行输出的连杆应力结果
六、总结
本文介绍了联合利用ANSYS Mechanical、True-Load、ANSYS Twin Builder和ANSYS Deployer软件进行连杆数字孪生体模型建立的操作过程及注意事项。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















