















































软件

产品


1.举例说明耦合副的使用方法
首先,耦合副主要作用对象是约束副(主要作用对象为移动副、旋转副、圆柱副),通过设定一定的比例关系,来控制不同约束副间的相对运动。
A.旋转副之间的耦合
比如对两个的旋转副来说,添加耦合副相对于在旋转副之间建立相应的传动关系,如下图,在两个旋转副之间建立一定比例的耦合副,其中一个作为驱动,另一个按比例耦合:
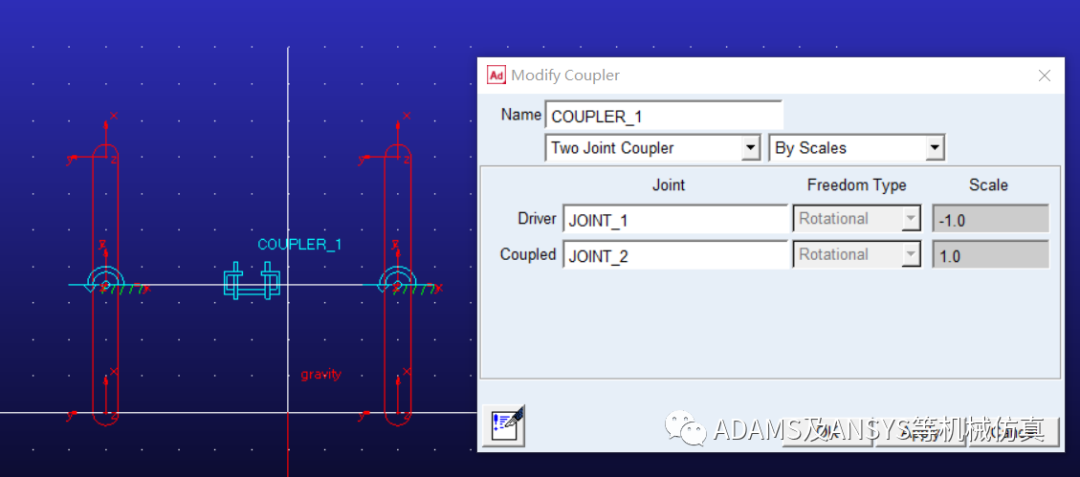
耦合副的比例关系如下式所示:

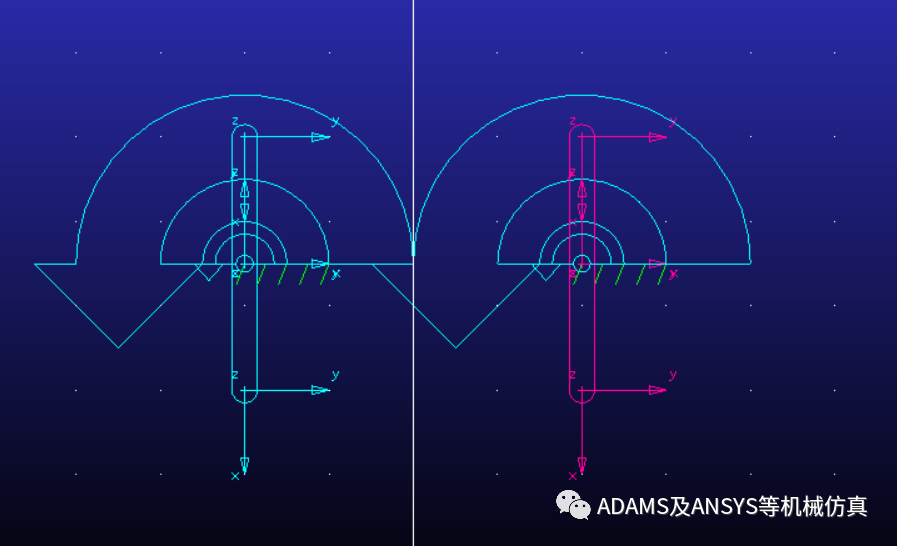
当Scale=-1和1时,两个旋转副转动的角度一样:
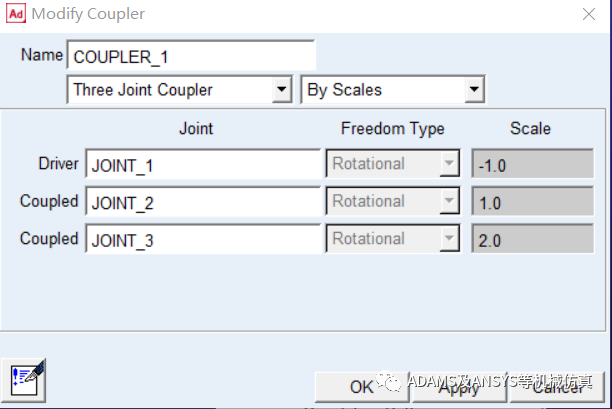
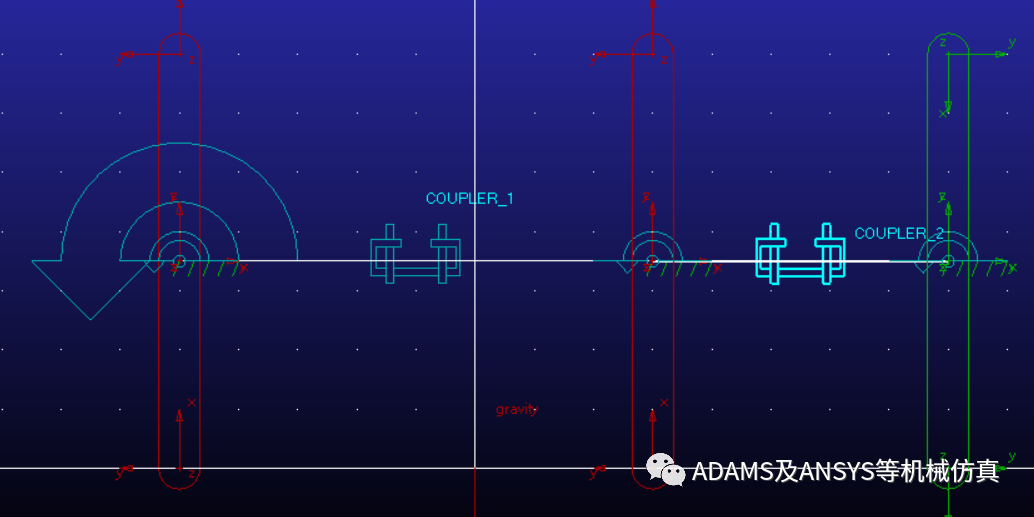
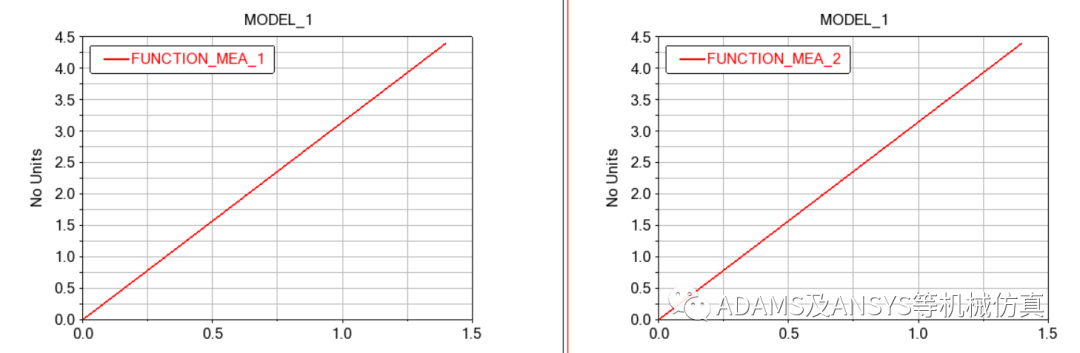
当出现三个旋转副通过一个耦合副连在一起时,如下图:首先,由于驱动副在joint_1上,所以joint_1的旋转角度是一定的,当Scale分别为-1(驱动)、1(从动)、2(从动)时,实际上Joint_2和Joint_3以1:2的比例旋转一定角度,并且两者旋转的角度和等于Joint_1旋转的角度。
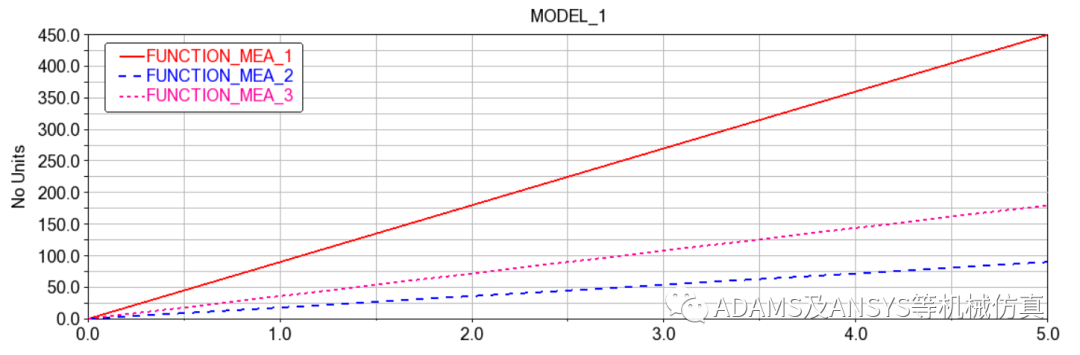
后处理结果中,Joint1的旋转角度为450°,Joint_2的角度为90°,Joint_3的角度为180°,符合上文分析规律。
一个耦合副,控制三个旋转副时,除作为驱动的旋转副外,剩余两个存在一定的比例关系,且受驱动旋转副的约束,为了避免这种约束,可以建立两个耦合副,这样就可以实现三个旋转副以任意比例旋转了,
如下图:
B.旋转副与移动副之间的耦合
旋转副与移动副之间的耦合类似于涡轮蜗杆的作用,由旋转变为平动,同时传动关系也是满足上文中的公式,但是这种传动关系中,旋转角度为弧度单位。
从下图可以看出,转动的弧度和移动的距离一样(Scale是-1和1):
2.用状态变量模拟不同传动比的运动
除了用耦合副模拟约束副之间的传动关系,还可以用状态变量来模拟运动关系。首先建立旋转件,并加上驱动(默认值即可)。
然后建立关于左边第一个件旋转角度的状态变量函数:
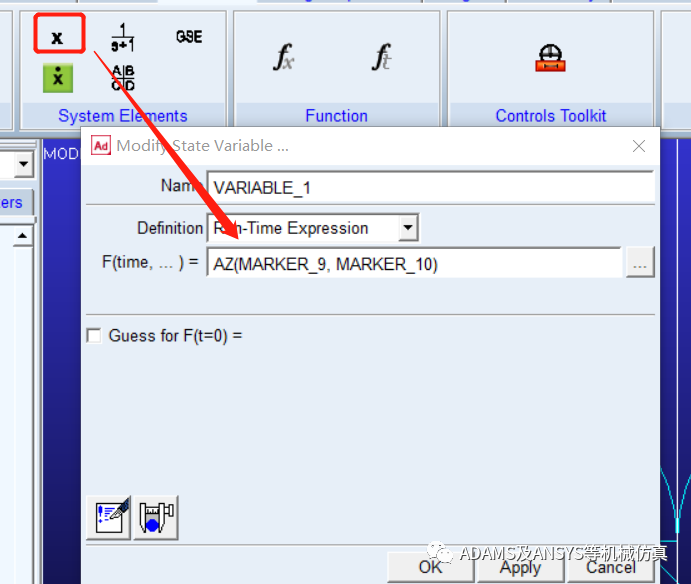
然后修改右边驱动副,将驱动函数设置为0.5*VARVAL(VARIABLE_1),其中VARVAL表示读取状态变量的值,不同的传动比可以在函数前面加相应的系数:
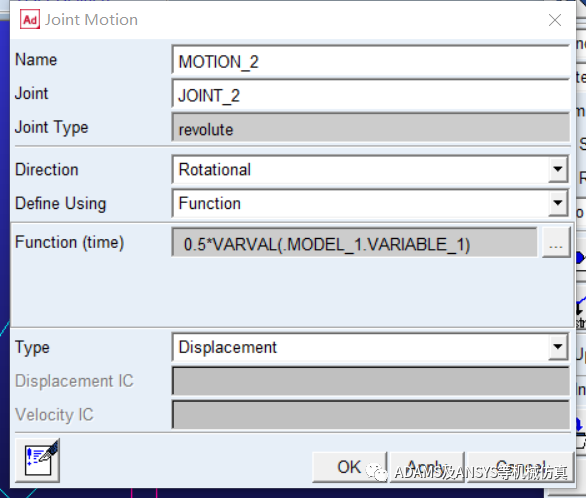
完成后,如下图所示,通过该方法设置驱动,左边的旋转速度是右边的2倍
在实际应用中,可以用这两种方法模拟传动系统的运动关系,如齿轮系统、转向系统等。
END
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















