















































软件

产品



项目背景
监管机构正在不断要求汽车制造商提高性能标准,其中一个典型的例子就是联邦机动车辆安全标准105和121,两个标准对制动系统的要求愈发的严格,要求重型卡车和挂车在常规制动以及紧急制动条件下都应具有很好的安全制动性能。这些法规中的典型要求是减小紧急条件下的制动距离。实现这样的目标可以通过设计更大、更重、更昂贵的制动系统来达到目的。但美驰的首席工程师Ragnar Ledesma并没有采用这种方法,而是通过更改ABS的控制算法来实现所有中重型卡车的制动目标。
ABS系统是基于mu-slip曲线(摩擦系数与轮胎纵向滑移曲线)来设计的,而mu-slip曲线定义了轮胎纵向滑移与制动力矩的关系。
mu-slip曲线上,滑移率为10%到15%的区间,一般为最大制动扭矩位置。制动过程中,不断的增加制动的压力,某一刻轮胎的滑移率超过这个最佳的点,从而使制动扭矩减小。ABS系统的目的是防止制动压力大幅度增加,超过最大制动力矩发生的点。除了控制制动力矩,ABS系统还能使轮胎继续滚动,这有助于司机保持转向能力。
通过比较每一个车轮与整车的速度,ABS系统可以预估轮胎纵向滑移。轮胎的速度用传感器很容易测量,车辆的速度不能直接测量,所以需要通过一套算法来估算整车的速度。
该算法的输入主要包括每个车轮的轮速、转向车轮转角、横摆角以及汽车是否在刹车还是加速模式。当前ABS系统的状态是由离散的控制系统来定义的,对应的离散状态分别为增压,减压和保压三种。这限制了达到最大化制动扭矩的能力,整车在整个制动过程中,均会使轮胎滑移率保持在最优滑移率位置上下波动。
项目挑战
Ragnar Ledesma考虑使用更复杂的滑移模式控制方法-变结构控制。通过这种控制来持续的控制施加到每个车轮的制动压力,从而在整个制动过程中,维持车轮的滑移率最大化接近目标值。
他研究出了一套分散管理的控制策略,即各个车轮相互独立的控制,整车与车轮子系统之间,在控制部分没有耦合关系。这样,每个系统(即轮胎)仅有一个基于轮胎滑移率计算出的控制输入变量(制动力矩)。
计算等效控制力矩需要估计制动力的大小,而获取制动力的方法是使用自适应非线性观测器来实现的。
这是建立一组微分方程来模拟一个特定的过程,通过给定系统的输入和输出的时间历程,得到系统状态变量的估算值。为了评估和验证这种方法的有效性,Ledesma面临的挑战是在制动过程中准确的模拟控制系统和整车。
解决方案
Ledesma最终决定使用Adams软件的原因,主要是美驰的动力学仿真(包括操稳性能、平顺性能、动态载荷等)均采用广泛应用、求解精度高的Adams多体动力学软件。
Adams Controls模块能够将卡车动力学模型与ABS控制系统模型进行融合。美驰没有应用永久的Adams Controls的license,而是使用了基于点数的license系统-MSC One。MSC One可以让美驰灵活的去使用Adams的各个模块,甚至MSC的相关产品,这样在不单独采购相关模块时就可以使用MSC的所有相关产品。
它支持使用频率不是很高但很关键的模块,例如AdamsControls模块用于控制系统的验证,虽然应用频率相对较低,但却是十分关键的功能。相比传统的维护单个license的方法,Meritor则是通过点数池MSC One来实现访问控制模块,该替代方案更加经济有效。
为了评估新的控制概念,Ledesma模拟了一辆总重量为76,500 lbf的满载牵引半挂车,仿真的工况是在60mph的速度下进行紧急停车。在模拟中直接测量了每个轮端的车轮角速度和主轴前后加速度。对主轴加速度信号进行数值积分,求出主轴前后速度。仿真假设制动系统可以提供所需的制动力矩。
所需制动扭矩的峰值为:在55mph时,前桥扭矩是12,000 Nm;平衡驱动桥的扭矩是20,000 Nm,拖车平衡桥的扭矩是14,600 Nm。目前,盘式和鼓式制动器可以满足这些扭矩要求。
结果与收益
仿真显示了提议的控制系统,在不到4s的时间内就可以使整车停止,制动距离为54米。通过一套更好的控制规则,在不进行制动硬件变化的情况下就完成了制动性能的提升。相比于传统ABS控制系统的波动减速度,新控制规则带来的是几乎恒定的减速度。仿真结果也说明了,新的控制规则下,在整个制动过程中,车轮的角速度和轮胎滑移率一直维持在最优值状态,所以新的ABS控制系统能够将制动力维持在最大制动力状态。
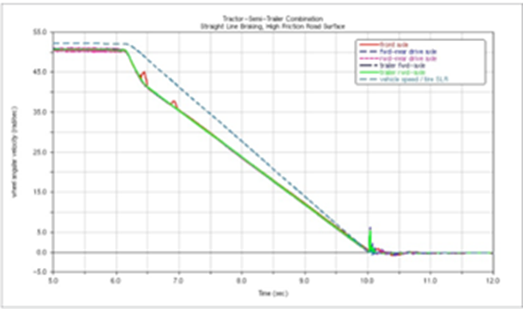
图:从60mph紧急制动时的车轮角速度
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















