















































软件

产品


一、复模态分析基本理论
实特征值分析用于计算结构的实模态,而复特征值分析则用于计算结构的复模态。复模态包含实部和虚部,实部代表该阶模态的阻尼,虚部代表结构的圆频率。如果实部为负,则说明该阶模态是稳定的;如果实部为正,则说明该阶模态是不稳定的。复特征值分析通常用于确定当存在特定的物理行为作用使矩阵呈现不对称性的情况下结构的稳定性。同时,复特征值分析还可用于计算带阻尼结构的模态。复特征值分析的控制方程如下:

其中,K为结构刚度矩阵,G为全局结构阻尼矩阵,M为质量矩阵,Kf为通过直接矩阵输入得到的额外刚度矩阵,GE为单元结构阻尼矩阵,af为额外刚度矩阵的系数,B为粘性阻尼矩阵。
求解复特征值问题得到复特征值p=α+βi和复模态振型ф。如果复模态含有正的实部,则认为该模态是不稳定的。不稳定模态通常成对出现(共轭复数)。
圆频率f可以通过下式计算得到:
阻尼系数可以通过下式计算得到:
该项对应于复特征值的实部。如果模态含有负的阻尼系数且实部为正时,则该阶模态是不稳定的模态。
如果问题的规模较大,直接求解上式计算复特征值计算量较大。所以,通常使用模态法进行复特征值问题的求解。首先,通过模态分析得到实模态。然后,在通过实模态投影生成的子空间上形成复特征值问题。最后,使用 Hessenberg缩减方法提取复模态。
在Hyperworks中进行复特征值分析需要在Optistruct求解器中同时定义EIGRL和EIGC卡片。它们分别规定了实模态和复模态的提取阶数。EIGRL卡片必须被SUBCASE段的METHOD引用。EIGC卡片必须被SUBCASE段的CMETHOD引用。
复特征值分析通常包含一个表示物理不稳定源的非对称矩阵。外部矩阵需要通过DMIG卡片提供并被SUBCASE段的K2PP引用。用户可以通过 PARAM和FRIC定义一个外部矩阵的系数,系数的默认值是1.0。
二、案例实战
1、模型说明: 如通过建立有限元模型,某制动系统模型如图1所示,简易模型包括制动盘、摩擦片及固定支架等。
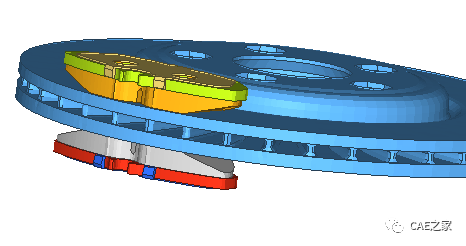
图1 简易制动系统模型
2、载荷说明: 如该制动系统包括三个子工况,分别是(1)制动过程制动力作用于制动盘工况,(2)制动盘旋转工况,(3)复特征值计算工况。
(1)工况一及二定义:制动压力为2.0MPa,以及2Km/h的制动速度。各零件之间需要建立接触,摩擦系统如设为0.3,采用面面接触,该工况为非线性准静态工况。

图
2
接触设置

图3 工况1边界设置
(2)工况三定义:复特征值计算,具体方法见公 众 号文章《
流固耦合模态分析探讨》,包括Eigrl和EIGC设置。

图4 正则模态设置

图5 复特征值模态设置
(3)全局参数设置。制动系统属于接触非线性问题,需要设置接触相关参数,如NLPARM,CONTF,EXPERTNL等。
3、求解计算:
通过读取out文件,可以得到所需要的信息,如复模态频率的虚部和代表模态阻尼的实部。如果实部是负的,则系统是稳定的。如果实部是正的,则系统是不稳定的。
复模态实部大于0,则表明模态阻尼比为负数,在振动过程中
振幅会随时间的增加越来越大,因此该阶模态下系统不稳定。复模态的特征值如下所示:

图6 复模态特征值结果
三、小结
(1)制动系统制动噪声是高频噪声问题,在实际工程中此类问题遇到很多,制动尖叫问题属于复特征值问题,可通过试验或仿真得到相关频率或阻尼特性,进而进行优化调整;
(2)根据工程实践,在不考虑材料阻尼的情况下,国内一般将负阻尼比小于-0.01设为引发噪声模态的阈值,而较严格的企业通常选用-0.006作为阈值;
(3)制动系统制动尖叫属于高度非线性问题,涉及到材料非线性,边界非线性以及 摩擦噪声自激励等相关内容,需要进行大量的仿真和试验积累。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















