















































软件

产品


前言:
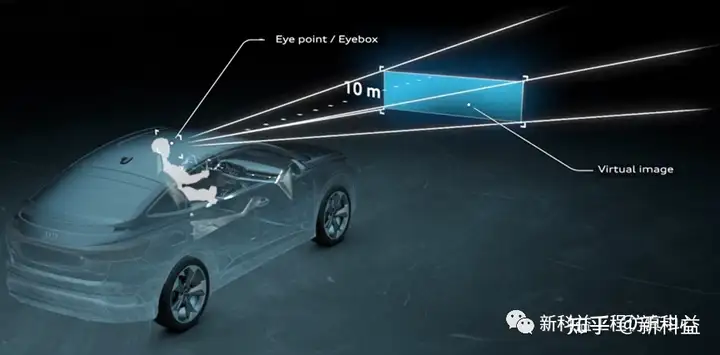
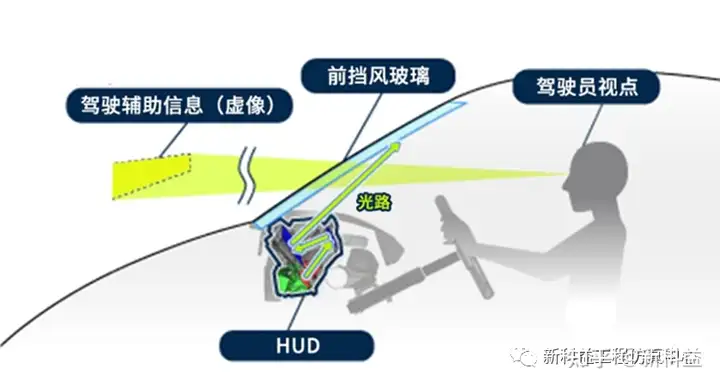
HUD全称Head up Display,即抬头显示系统,也称汽车平视显示系统,它运用光学反射原理,结合新型显示技术,将车辆仪表信息、导航信息以及ADAS信息等,投射到前挡风玻璃上,以减少驾驶员眼球视点位移,有效避免驾驶员行车过程中频繁低头看仪表或车载导航所导致的盲驾风险,提高行车安全。
目的:
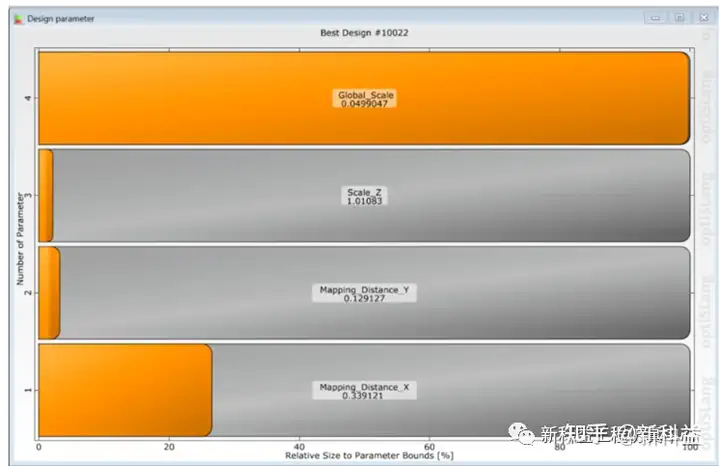
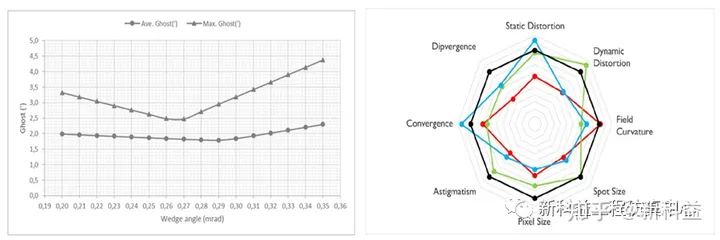
在以下案例中,我们将使用Ansys Speos结合optiSLang实现HUD光路设计的优化,通过speos光学仿真分技术分享 | Ansys Speos结合optiSLang优化HUD光路设计析,可以初步提供抬头显示器虚拟图像的质量以及光学系统性能的指标,然后我们可以利用optislang驱动HUD系统内反射镜的位置以及角度作为设计参数来优化虚拟图像的缺陷,例如畸变、扭转、放大、旋转、鬼像、光斑尺寸、散光等,进而达到最佳光学质量的虚拟图像。
操作流程概述:
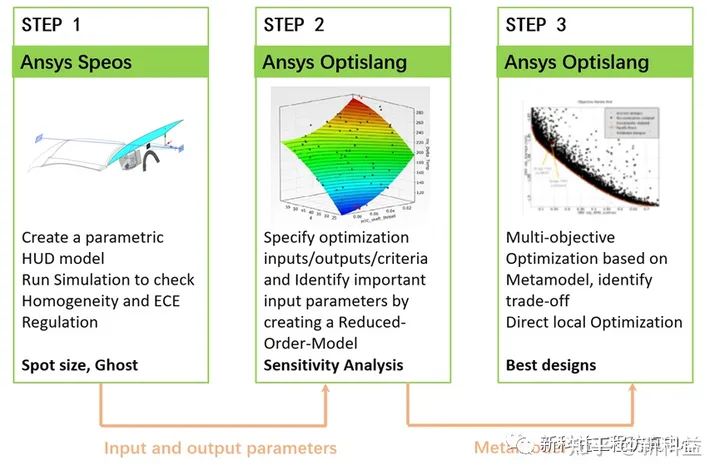
优化工作流程
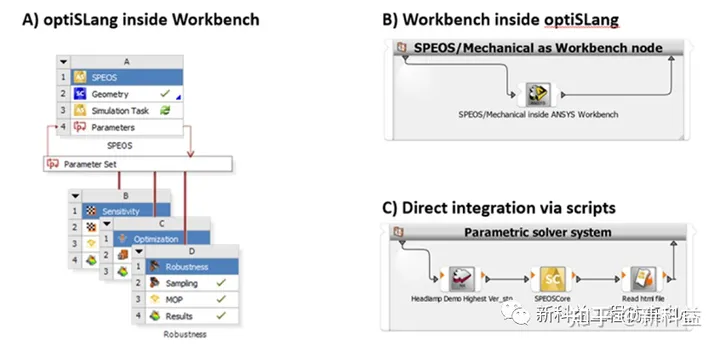
1、Speos和opitSLang的数据传输,目前数据传输有以下三种方式:
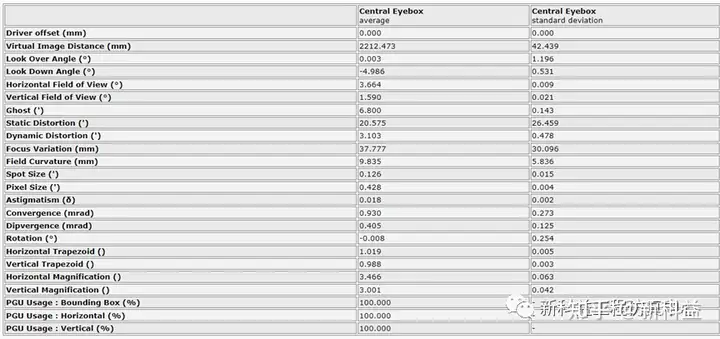
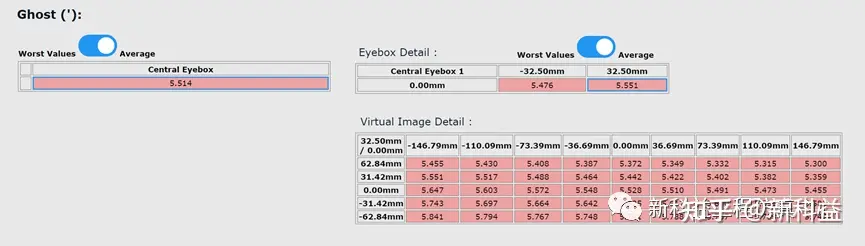
2、在speos中的Light simulation中,点击建立HUD成像分析,完成初步的HUD光学系统的仿真,并在HUD分析模块中,我们可以找到分析报告中找到各项具体参数,以此来进行分析:视野大小、畸变、鬼影等虚拟图像的质量是否达到最佳。

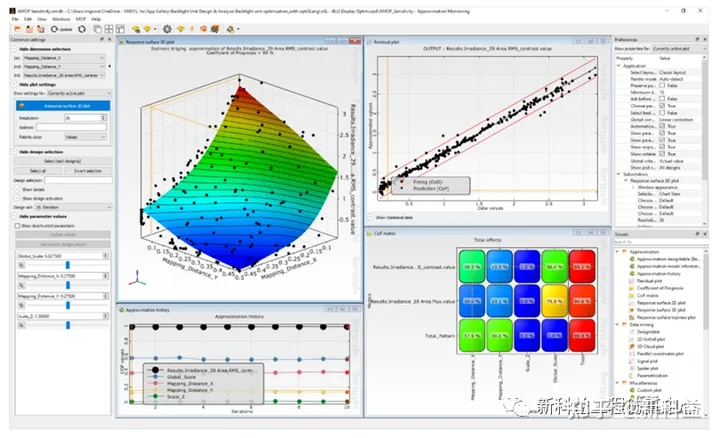
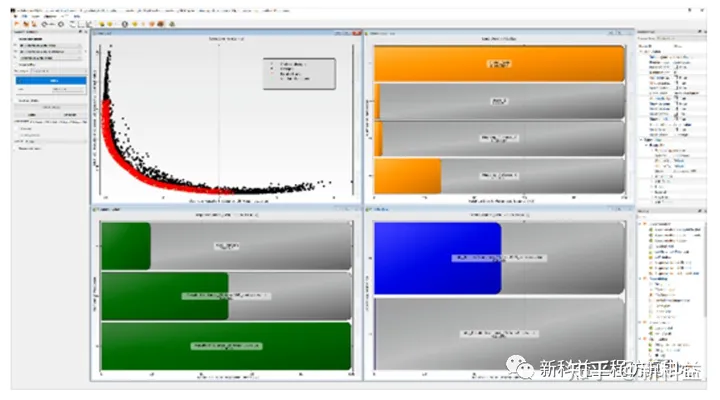
optiSLang根据参数的数量和类型,确定最适合的优化方法。本文使用随机搜索方法,它模仿自然生物进化的过程,如适应、选择和变异。在本例中,样本的最大数量设置为10000,将在MOP上执行优化,然后使用真正的求解器验证最佳设计。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















