















































软件

产品


模数m:自己设定,模数越大,齿轮的齿就越大,承受负载能力越强,但传动精度也当然有所下降。
齿数z:自己设定,它与模数二者配合决定了齿轮的大小。为了便于计算,一般设置为奇数。
压力角a:国标有规定,一般设置为20。
以下则是一些画图要用到的公式
齿宽s:s=mpi/2
齿根圆直径df:df=m(z-2.5)
分度圆直径d:d=mz
基圆Db:Db=dcos(a)
齿轮顶直径da:da=m*(z+2)
为方便理解,请看下图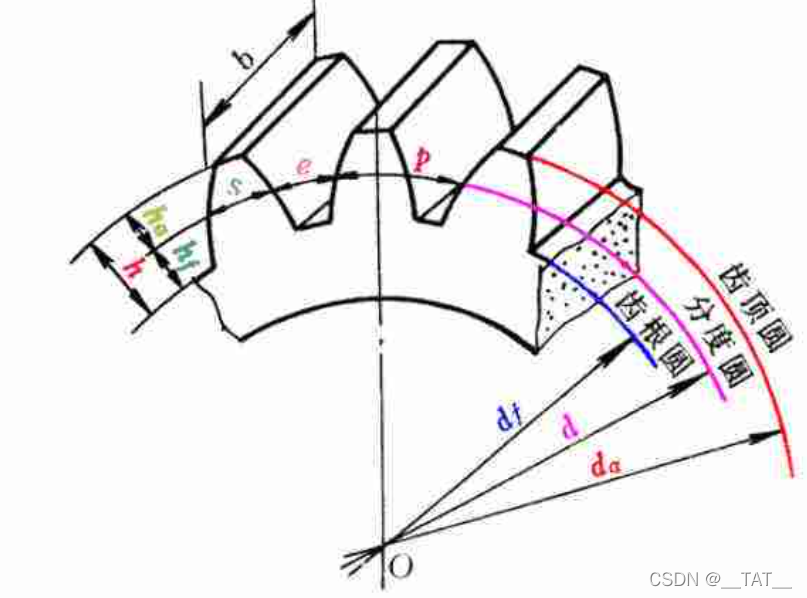
图源于百度,图中还包含了一些我上文没有提到的。但是画图用不到,如h是齿高,p是齿距,ha(齿顶高)=hf(齿顶高),e(齿间距)=s等等。而基圆图中也没有给出,原因是该圆是一个辅助画线的圆,并不具有实际意义。
这个得根据自身项目来灵活选取了,以我设计的机械爪子为例:

目的:大概想要设计成这个样子,我的任务仅仅是为了抓取东西。两个状态,开and关两个功能即可。
要求:可以抓取200g且宽度达80mm。
思路:对精度要求不高,但希望爪子能够张的很大,最大状态可达85mm左右。
设计:13齿,模数为2的齿轮大概可以。可利用Solidworks草图功能辅助感受一下。
Tips:前文提到的分度圆即使两齿轮相切的地方。
草图如下: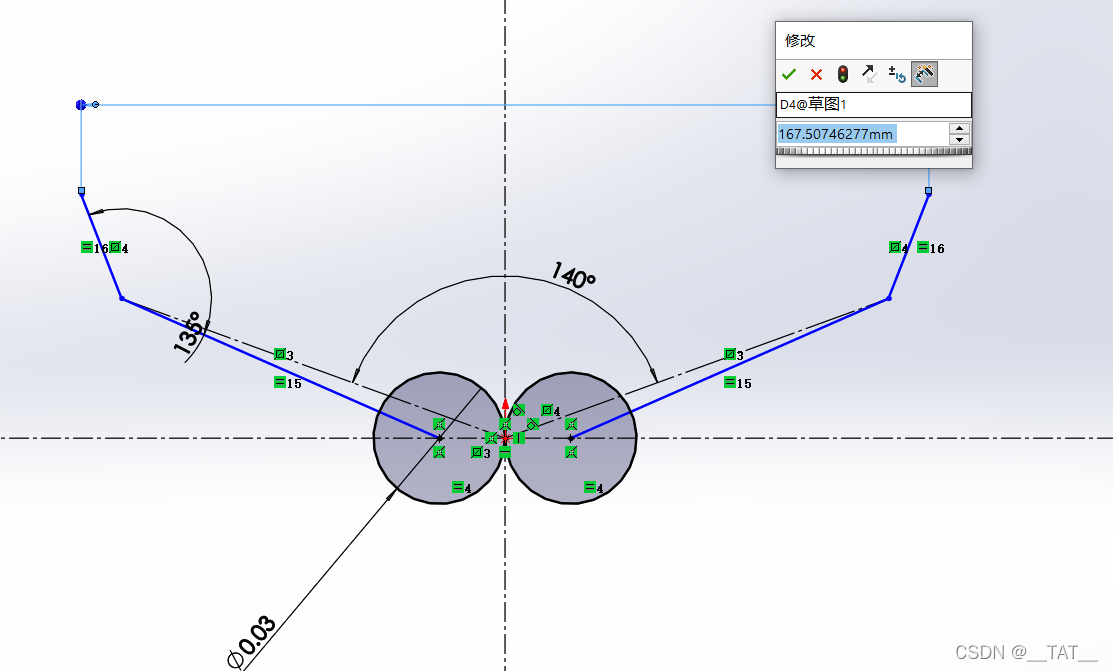
重新整定参数:可以看出,当爪子张开时,尽然能抓取尽170mm的物体,这远超出我们想要的范围,照成资源浪费。于是这次我们把参数设定为9齿,模数1.5。
草图如下:
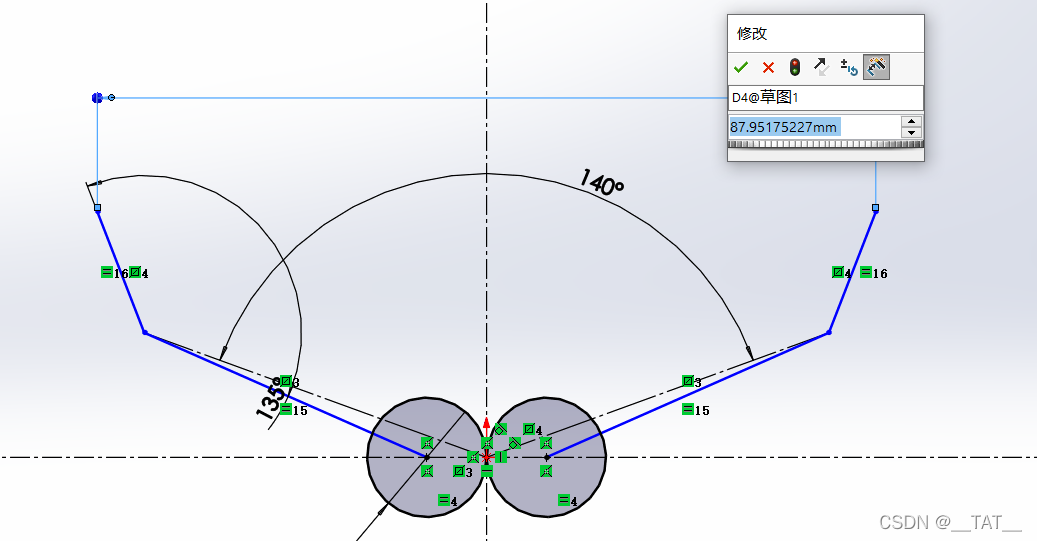
可以看到,爪子最大能张开到87mm左右,大致符合我们的要求。
最后,参数整定说明:爪子到底多长多大,我们使完全没有详细的设置的。只是从草图看起来,比例大概合适就确定下来了。在13齿,2模的情况下,我也能通过缩小爪子进而达到最大张度在90mm左右,但那比例看起来太奇怪了,故而被索弃。
有了上文基础,我们再测出爪子长度,则可以定义一下全局变量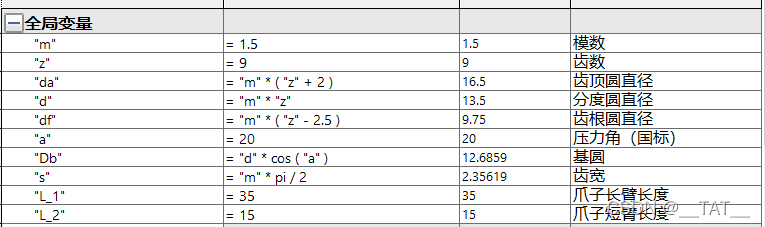
一、绘制齿根圆、分度圆、齿顶圆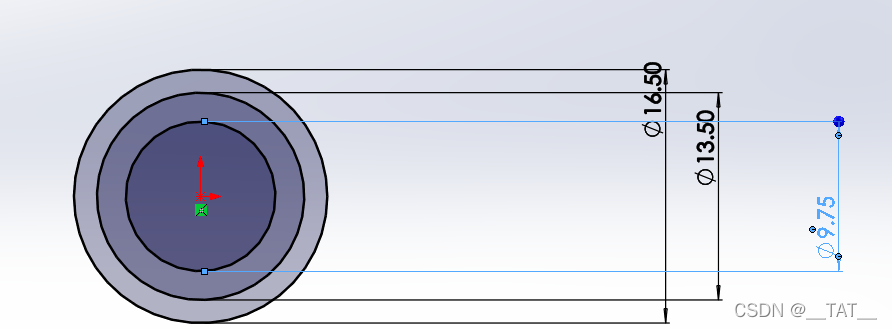
二、绘制渐开线坐标方程
(Db/2)*(t*sin(t)+cos(t)) //Db表示基圆齿轮,要在全局变量中抄下来,不可以直接用Db
(Db/2)*(sin(t)-t*cos(t))

效果如下: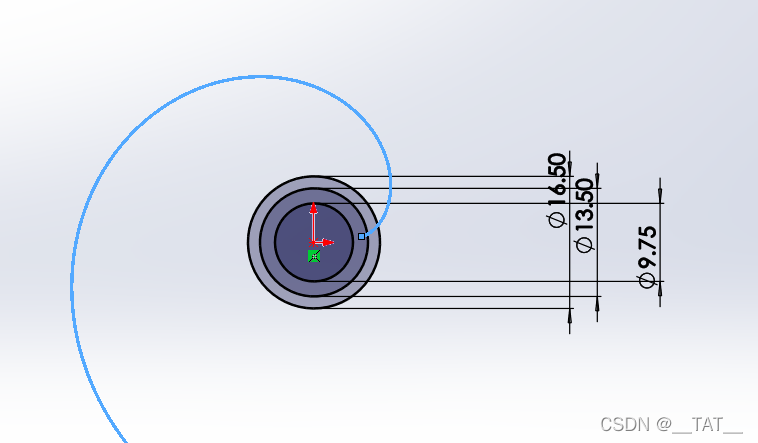
三、画辅助线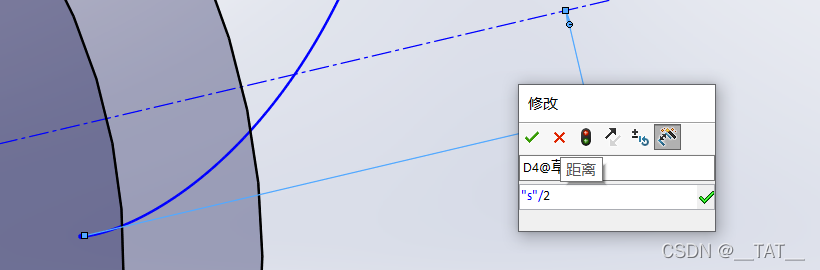
四、画切线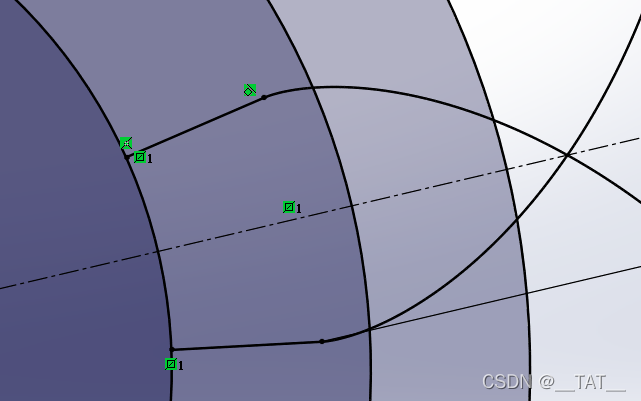
五、切掉多余的部分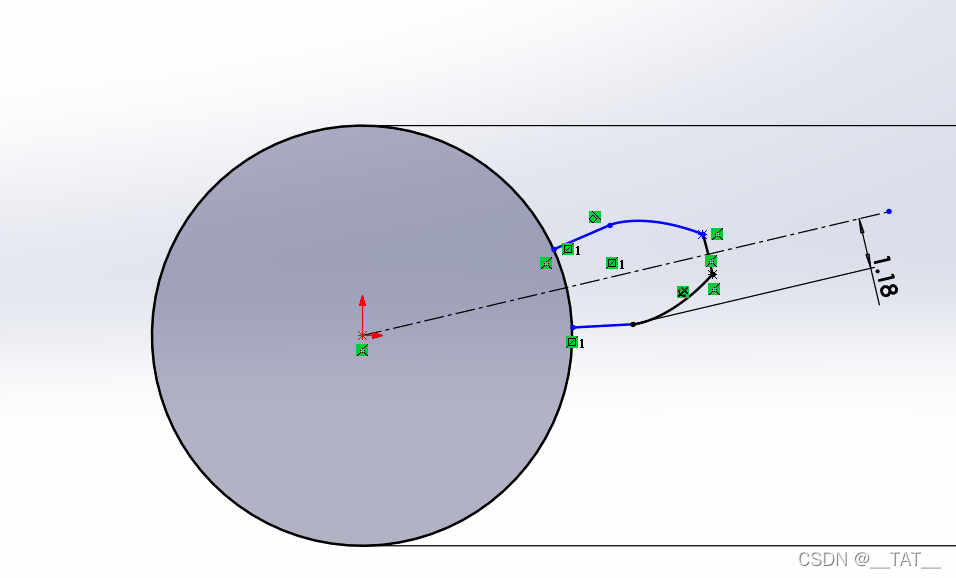
六、通过圆周阵列得出最后的齿轮
这里得分两次拉伸,即齿和圆盘分开拉伸。不然无法在圆周阵列找不到要阵列的特征。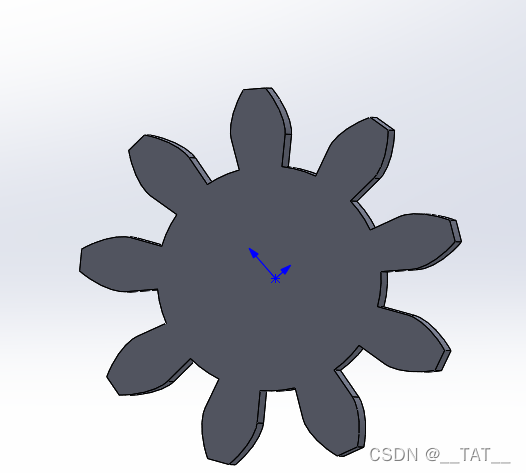
1、先让爪子在某一特定平面上,方便操作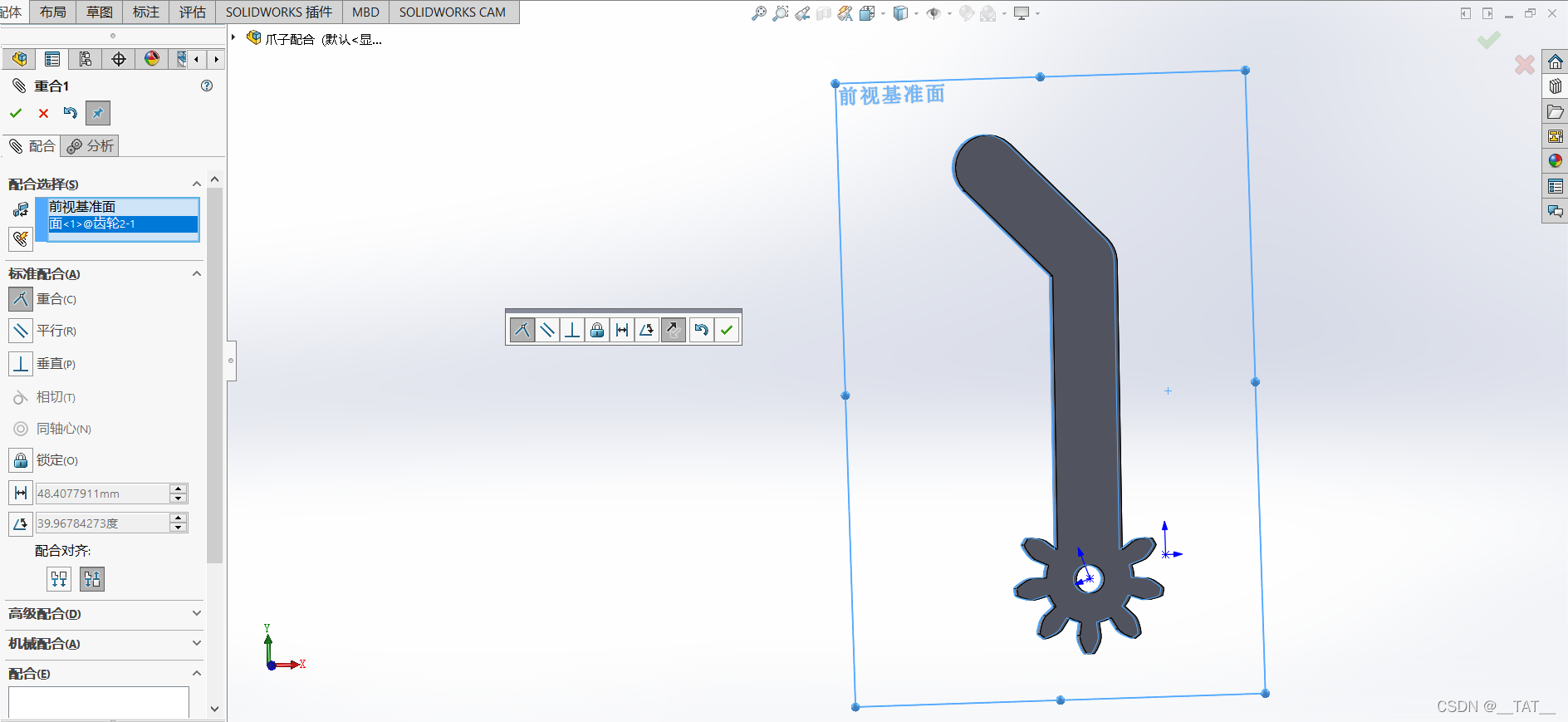
2、让齿轮沿着某一特定轴转动,防止跑偏
这里的基准轴,垂直于前视基准面以及和原点重合
3、左右两个爪子的距离配合
这里需要让两个爪子在同一个平面上,并且两个点在同一水平直线上。以及两个点保持一定的距离,其中可以灵活设置,差不多即可。如图: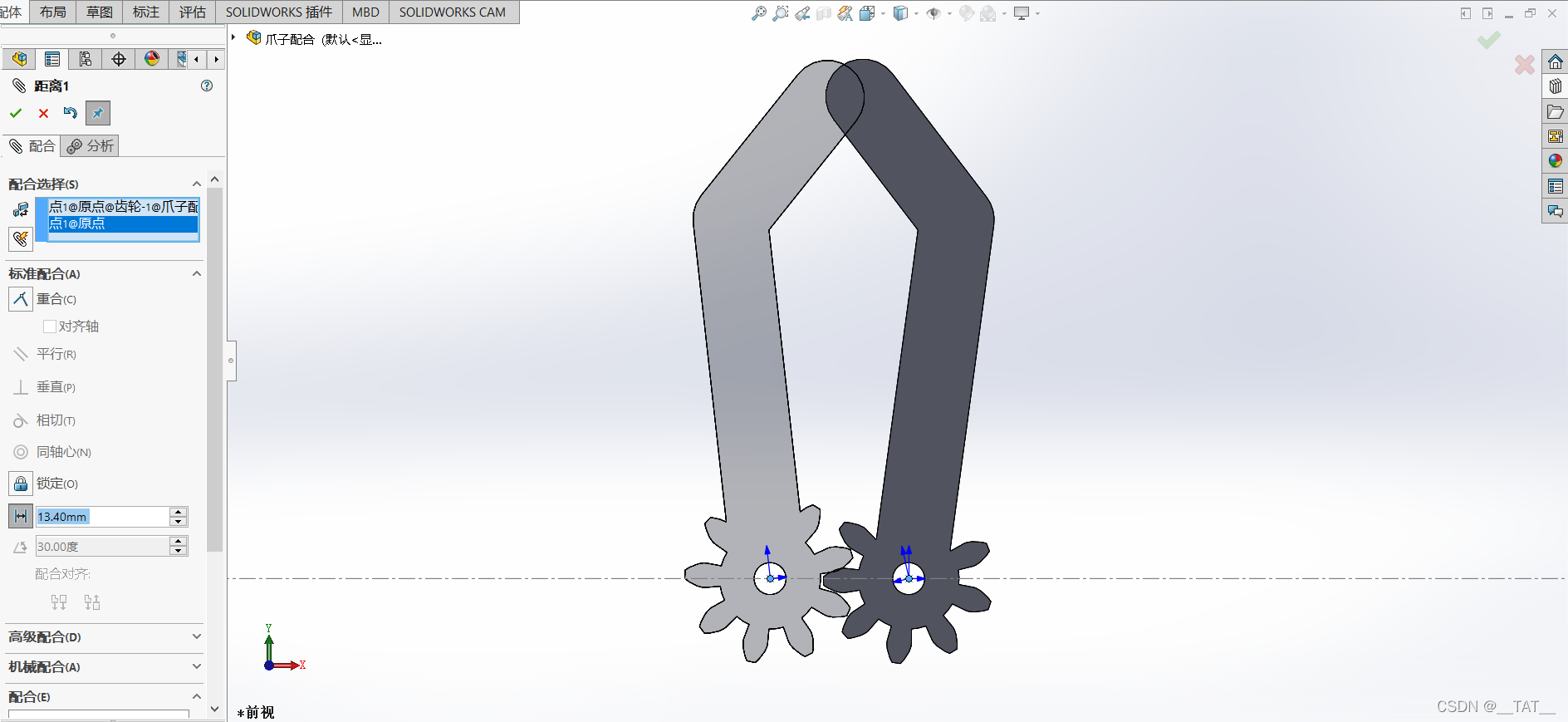
4、齿轮槽配合
齿轮齿画上一条辅助线,和齿轮两边对称
再另一个爪子上,画一辅助线,和齿轮槽对称。如图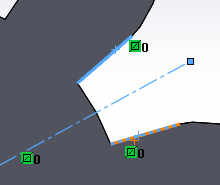
最后让这个连个辅助线重合,重合之后再压缩掉该配合。
5、齿轮配合
如图,点这两个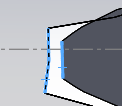
再点机械配合中的齿轮
注意注意,要修改比率,改成一样大。一般是把小的改成和大的一样。
6、完成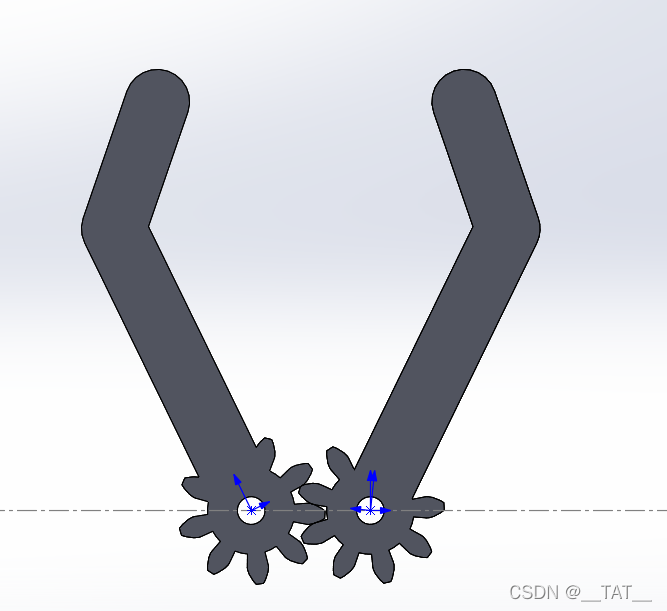
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















