















































软件

产品


想到转向工程师该会的理论计算,力矩波动,阿克曼率是基础常识,然而现在随着设计的精细化要求以及新技术的引进等原因,力矩波动和阿克曼率的设置已经变得不那么重要,前几天看公众号“汽车技研”有篇文章是《转向系统力矩波动到底有多重要?》,这篇文章里介绍了几种计算的方法,确实这个东西方法越来越多,是否准确成为大家关系的问题。今天我写一种我自己用过的一种分析方法,有用没用的,就当个乐趣吧。之所以建这个模型,是感觉各种计算的值还是不太靠谱,还是实际模拟的更靠谱。
转向系统之所以会存在力矩波动,究其原因还是因为十字轴万向节对力矩和转速的不等速传递。当然我之前在揽胜运动版和宝马7系见到了准等速万向节和等速万向节,这就不用考虑力矩波动了。当转向系统使用了不等速万向节,力矩波动是布置一定要考虑的一项因素,力矩波动的影响因素主要有:
1.转向管柱与中间轴的夹角β1,中间轴与转向器输入轴的夹角β2;
2.相位角ψ;
3.某些设计开发要求力矩波动的力矩波峰在方向盘中间位置,如下图所示(这里是一个错误的示范,写这篇稿子时手头试验资料不多,没找到有车在KC报告中显示将传动比的波峰或者波谷放在初始位置):

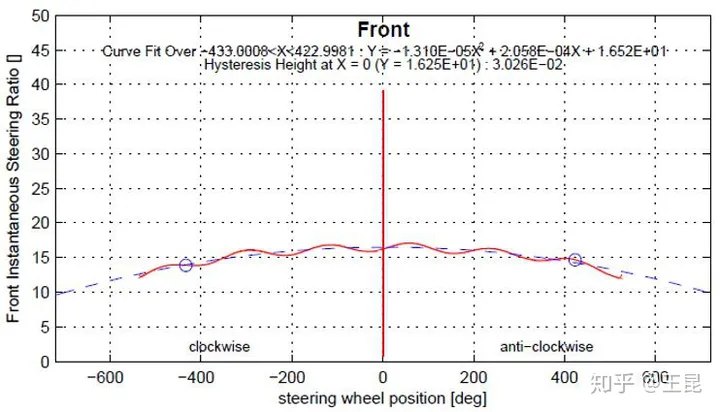
这里影响的主要因素就是第一个万向节叉在设计位置相对方向盘的位置。如图粉色与蓝色线的夹角,后面我们简称初始角(请忽略我用了一个比较LOW的转向管柱)。

下面我们来讲讲方法:
首先,我们先打开一个ADAMS自带的转向系统模板:

修改硬点:

转向管柱与中间轴的夹角β1,中间轴与转向器输入轴的夹角β2可以通过硬点设置来搞定,运动模型主要是解决如何设置相位角和初始角。
这个方法是以前同事整理的。
后面就是对模型做个修改了:
以前我们用过一种方法,就是在转向管柱中间轴的十字轴上取两个端点,如图所示:

不引起误解,细节图看一下:

然后在模型中新建这两个点:
建立前万向节节叉十字轴承参考点:

建立后万向节节叉十字轴承参考点:

修改转向相位角
中间轴相位角分别由前后两个万向节控制,我们通过参考硬点,分别设置两个万向节的角度,在这里先设置后万向节。
在转向系统模板界面,右键单击后万向节,点击属性设置,此方法是同事归纳的,此处不再多说。

方法2
这个方法是后期修改的,我觉得更适合前期开发过程中设置转向万向节相位。
首先是建立两个参数,分别是相位角(Phase angle)和初始角(Intial angle)。

然后后面的步骤:
0.新建万向节十字轴

后面的上点

1。按照步骤

2.按照步骤

3.注意,这里引用到了初始角这个参数,建立第一个万向节节叉的初始位置U1。

4.分别建立U1_0和U1_1,这是第一个万向节叉上十字轴的两个端点


5. 并根据这两个端点建立第一段轴:

6.建立第一个万向节从动叉的位置,并重复上面4.5.的步骤:

7.利用相位角参数建立第二个万向节的主动叉位置,并重复上面4.5.的步骤:

8.建立第二个万向节从动叉的位置,并重复上面4.5.的步骤

9.将模型里的万向节约束去掉,如图:

10.新建十字轴与节叉的旋转约束,一共四个:


建立REQUEST测量
我们需要建立方向盘输入角速度REQUEST和转向器输入轴角速度REQUEST


做完这步后,转向系统模型就设置好了,最后保存模型。
建立模型仿真
定义时间从-50s开始,输入角速度为5deg/sec做100s的模拟。

按F8进入模拟界面,输出力矩波动曲线。

这个模型的优势在于通过直接优化初始角和相位角优化力矩波动,比用坐标要好用些。过程虽然有些复杂,但是改完可以一直用,而且对后期其他分析借用到转向系统都会准确一些。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















