















































软件

产品


刚学习Hypermesh 的时候听说过Ls-dyna这个软件,当时只知道是做碰撞的。Ls-dyna我用的也比较少,只会一些简单的显式动力学分析,而且个人感觉网上相关的资料比较少,经常查看的就是关键字手册。
Ls-dyna软件主要是做显式动力学的,它也有自己的前处理软件Ls-prepost,但是操作相对繁琐,如果模型中零件少还能接受。更多人应用Hypermesh做前处理,而且听说很多企业做仿真时所有的前处理工作都是用Hypermesh或者Ansa,包括画网格、定义材料属性、分析步、边界条件、接触对等,然后导出相应的有限元文件,最后直接扔到相应的求解器计算,像Abaqus、Ls-dyna等软件只起到求解的作用。
显式动力学(Explicit)计算:

MATL1号材料,只考虑线弹性,密度为7.85E-9 t/mm3,弹性模量为2.1E5 MPa,泊松比为0.3。

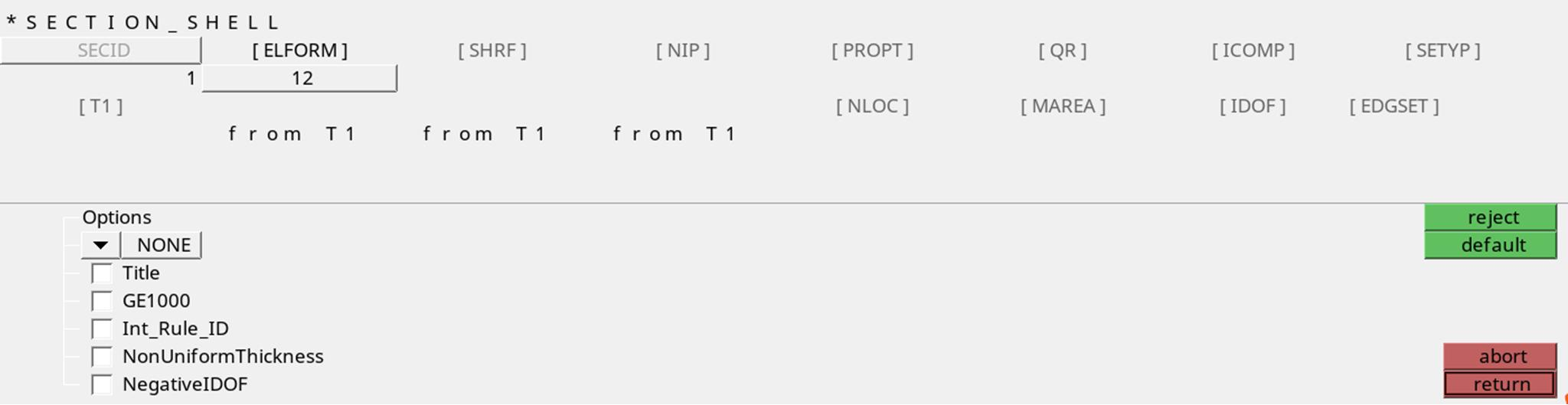
Property属性为SECTION_SHELL,ELFORM为12号关键字(平面应力问题)。
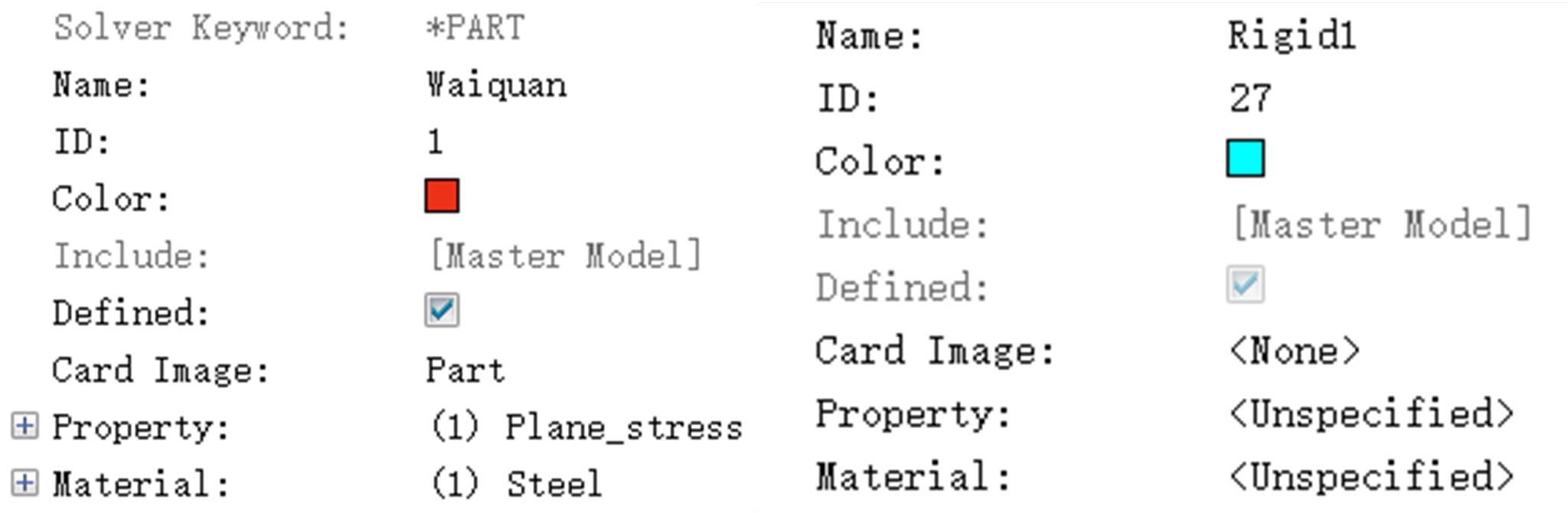
如果Component所在的“层”需要定义相关属性(弹性模量、泊松比等),则将其关键字Card Image改为Part,并将定义的Materials(材料)与Properties(属性)赋予相应的Compenent,如果Component所在的层为Rbe2(刚性单元)或者Rbe3 (柔性单元),这类单元不需要定义相关属性,将Card Image改为None,不需要定义材料与属性。
将轴承的内圈内侧与保持架的内侧定义Rigid刚性约束,方便定义轴承内圈与保持架的相关边界条件或载荷。主节点为轴承的中心,从节点分别为轴承的内圈内侧节点与保持架的内侧节点。

定义接触时一般不使用Model这个界面,而是使用Solver界面定义,单击右键即可选择想要定义的东西。
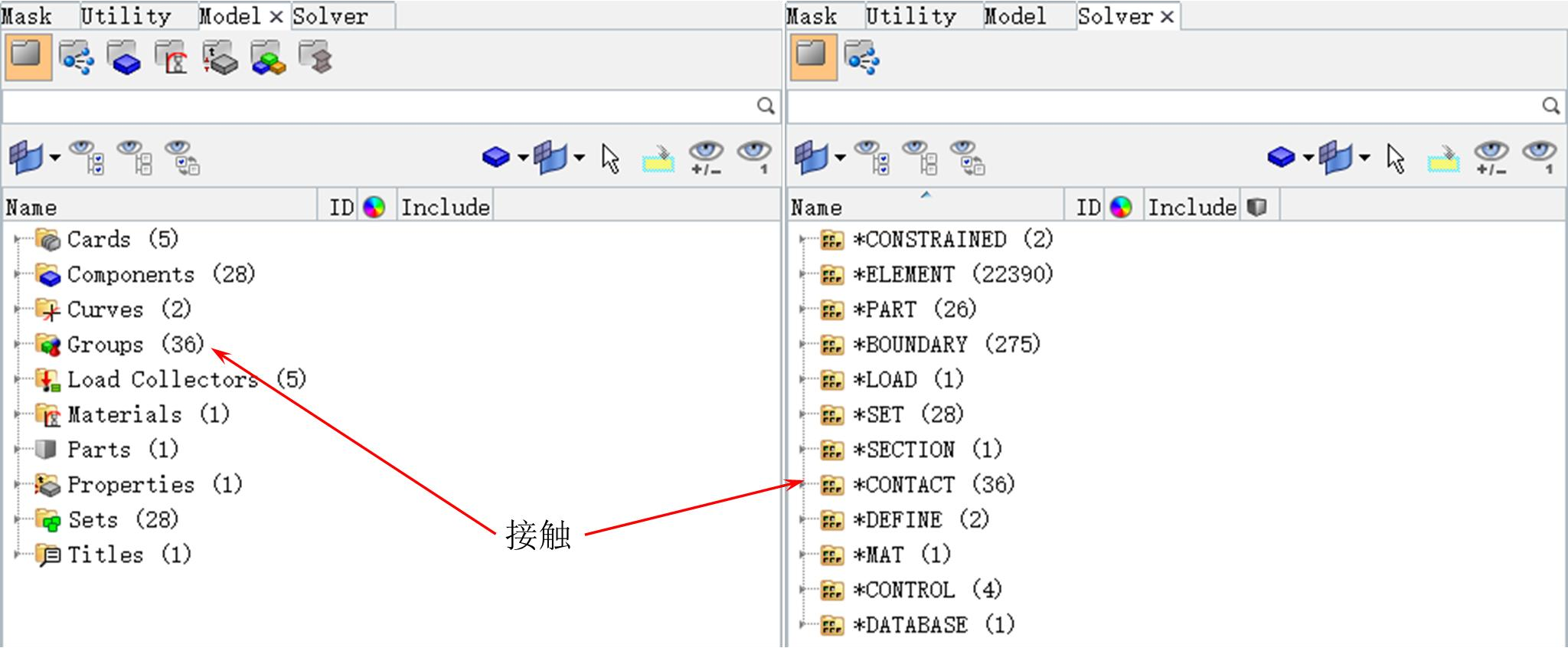
二维接触(Card Image:2dContact)只有两种,通过Automatic Options选择,Surface to Surfzce为面与面接触,而Tied为绑定。定义接触的主面与从面时,只能通过Set集合定义,而Set集合是Part的集合(通常接触对的主从面都是Node的集合,但是提交Ls-dyna计算会报错),关键字为SET_PART_LIST。而选择对应的接触对时,Hypermesh不支持Part集合的关键字(可以定义Part的集合,但是选择接触对的主从面时,软件不识别),因此先定义主从面的Node集合,并建立接触关系,最后将Node集合改为Part集合。
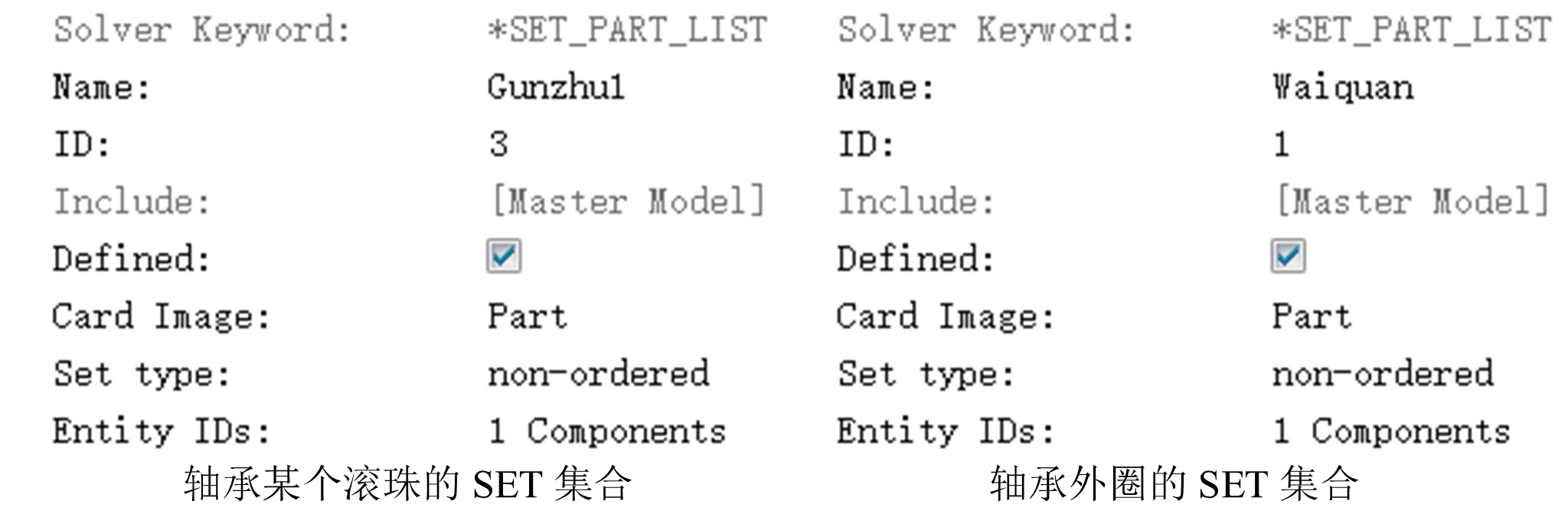
轴承外圈与1号滚珠的接触,,接触对ID号为1,主面为轴承外圈(PSIDM,M代表Master,ID号为1),从面为1号滚珠(PSIDS,S代表Slave,ID号为3),最大静摩擦系数(FS)为0.1,动摩擦系数(FD)为0.05,轴承外圈与滚珠的接触共12对,不一一列举。

1号滚珠与轴承外圈的Set集合
1号滚珠与轴承外圈的接触属性

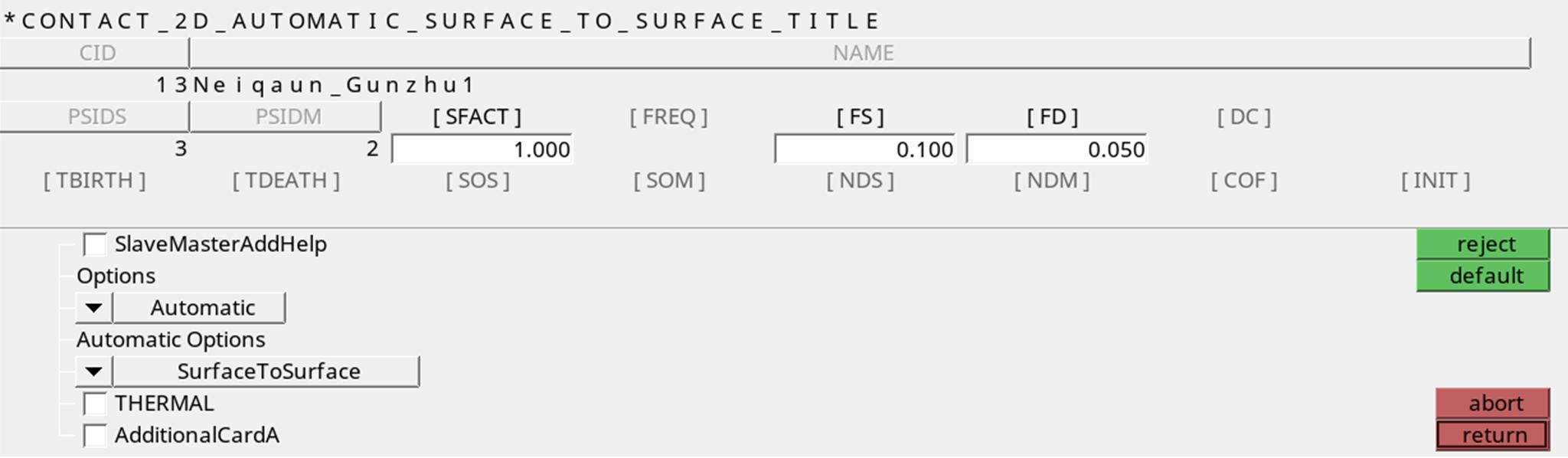
轴承内圈与1号滚珠的接触,接触对ID号为13,主面为轴承外圈(PSIDM,M代表Master,ID号为2),从面为1号滚珠(PSIDS,S代表Slave,ID号为3),最大静摩擦系数(FS)为0.1,动摩擦系数(FD)为0.05,轴承内圈与滚珠的接触共12对,不一一列举。

1号滚珠与轴承内圈的Set集合。
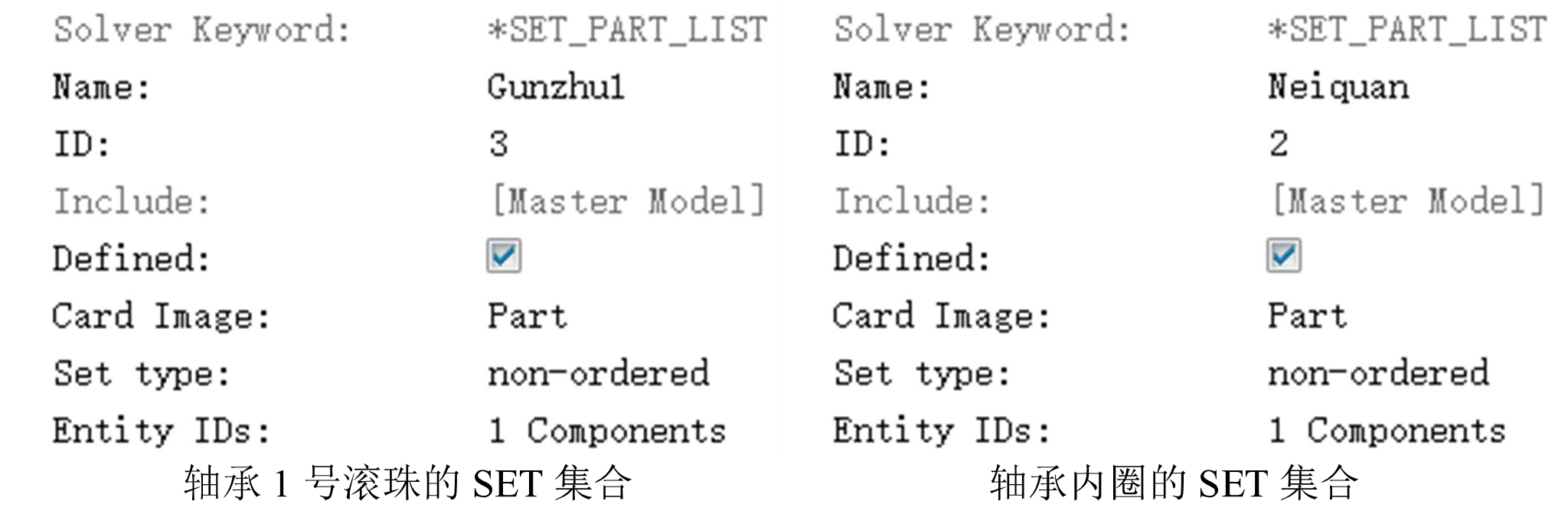
1号滚珠与轴承内圈的接触属性。
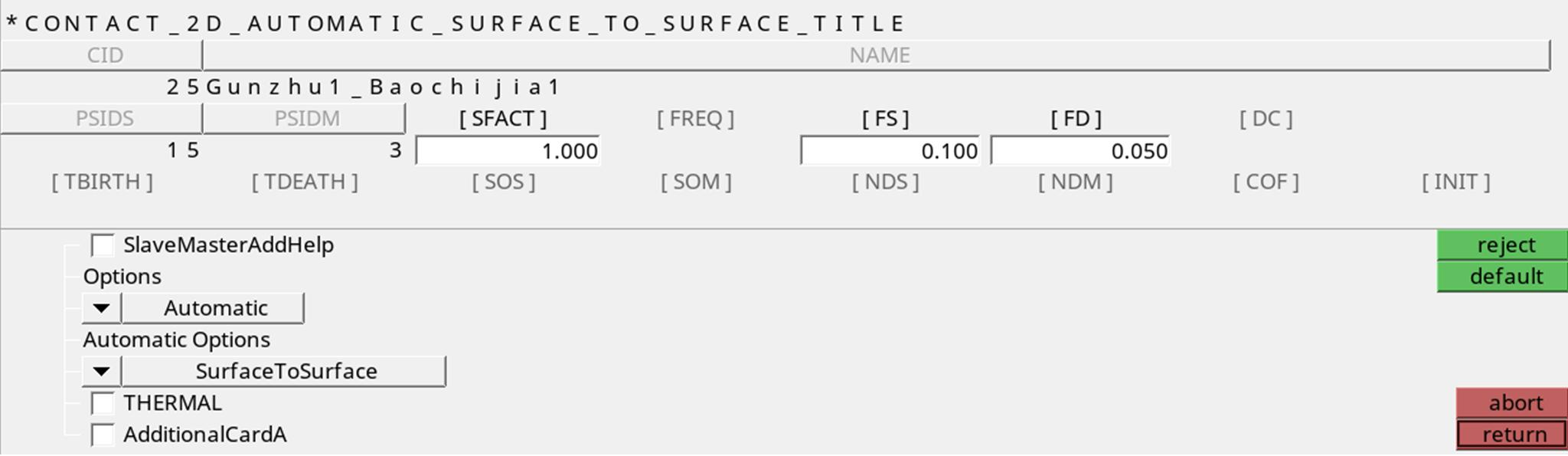
轴承保持架与1号滚珠的接触,接触对ID号为25,主面为1号轴承左右保持架(PSIDM,M代表Master,ID号为15),从面为1号滚珠(PSIDS,S代表Slave,ID号为3),最大静摩擦系数(FS)为0.1,动摩擦系数(FD)为0.05,轴承与滚珠的接触共12对,不一一列举。

1号滚珠与保持架的Set集合。
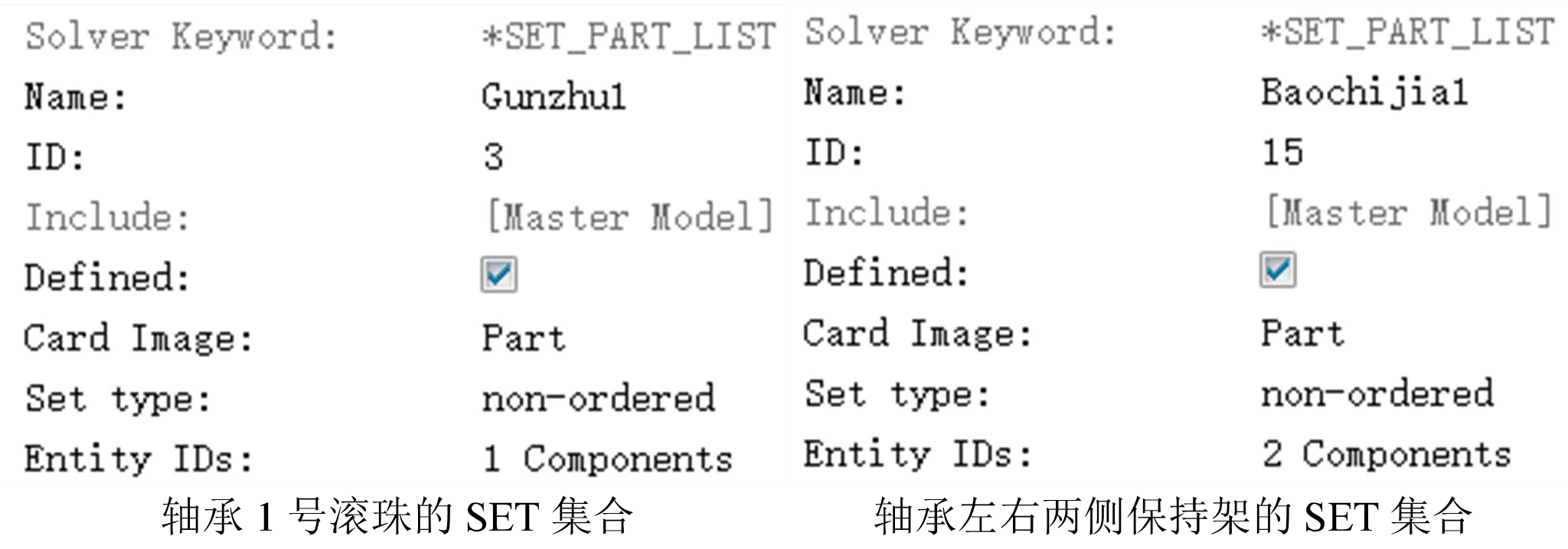
1号滚珠与保持架的接触属性。
定义每个边界条件与载荷之前需要先定义Load Collector,每个边界条件或每个载荷对应一个Load Collector。
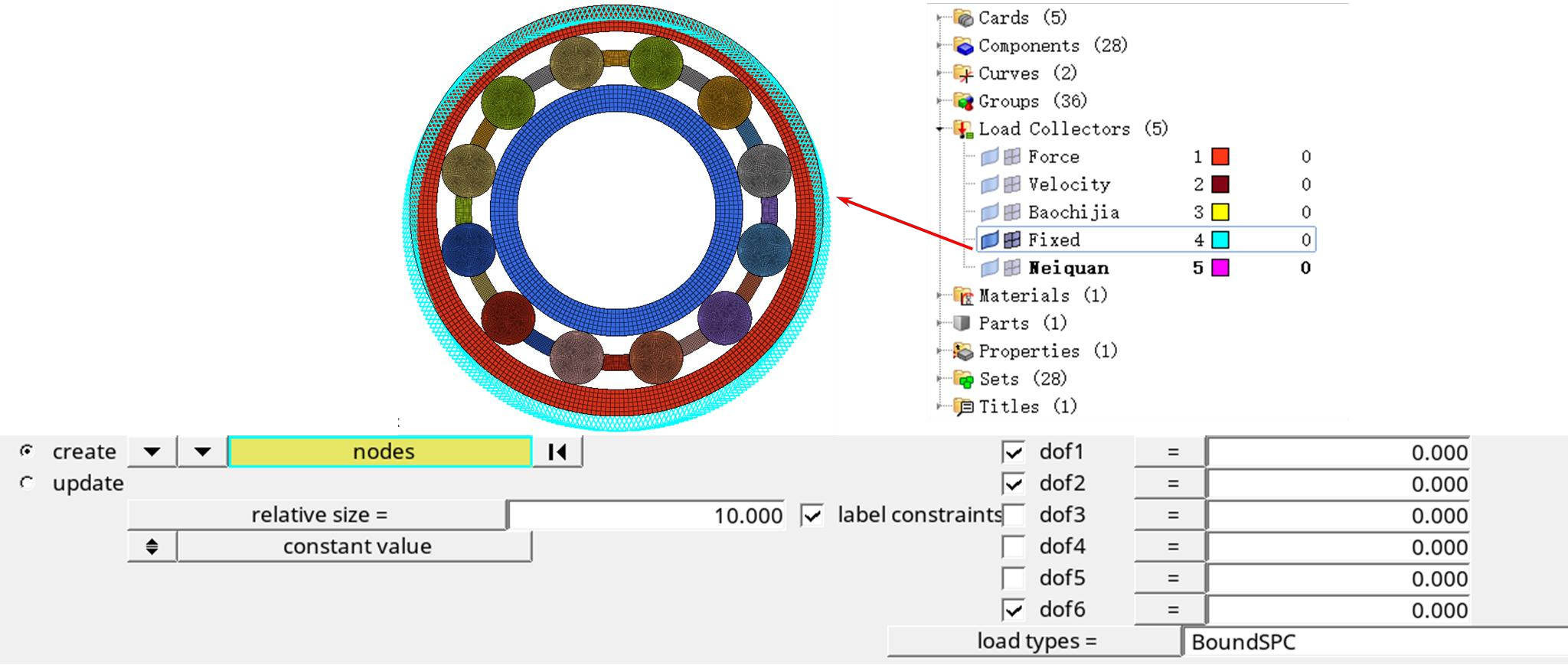
轴承外圈的边界条件(Analysis→Constraints):约束轴承外圈外环的1、2、6自由度。
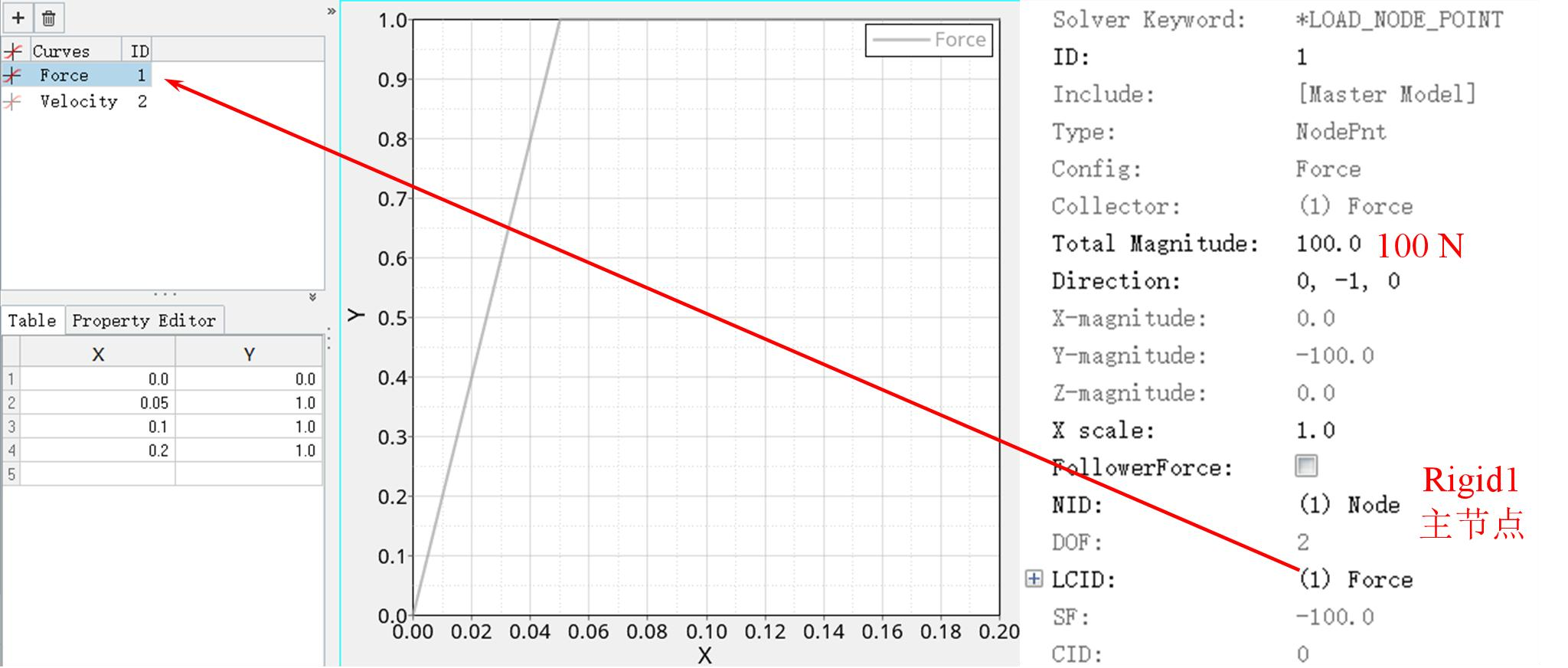
轴承内圈的力载荷:轴承内圈内侧(Rigid刚性单元)的主节点定义Y轴(2自由度)负方向100 N的力。
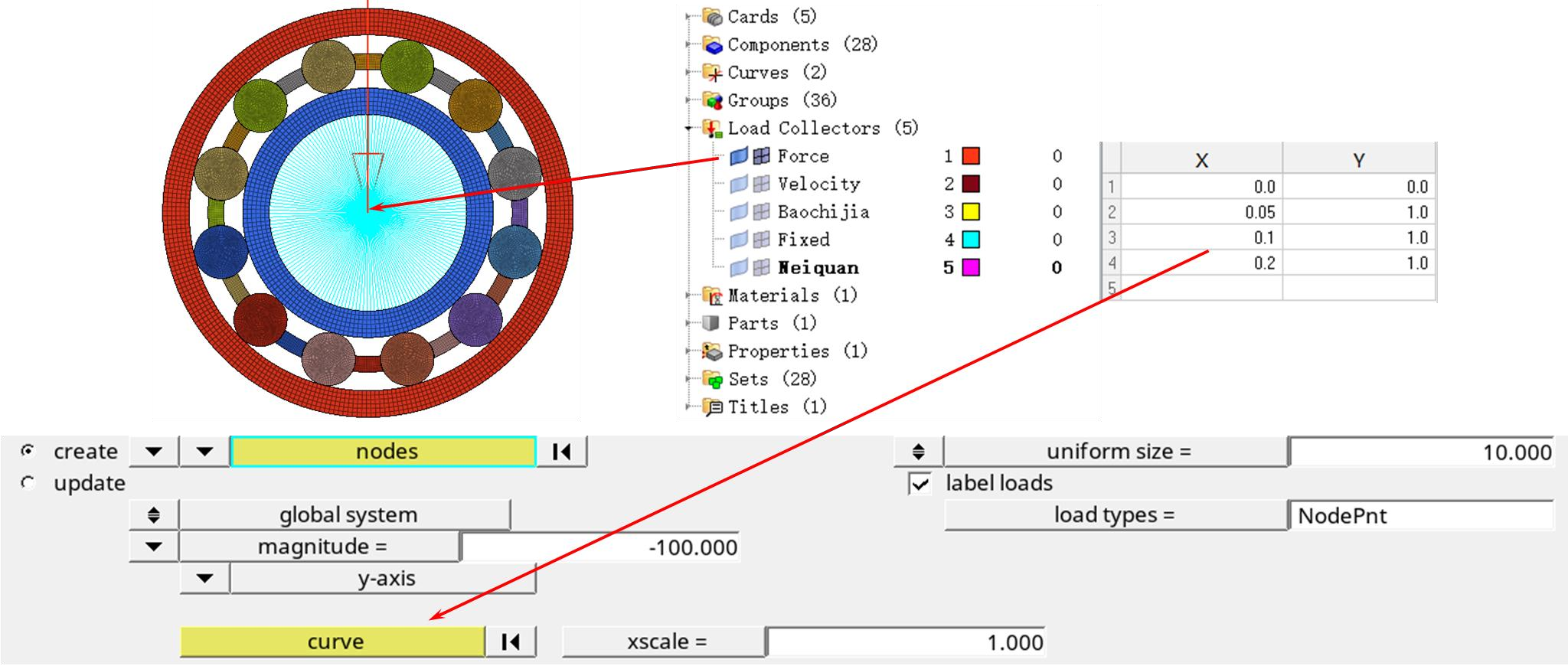
力的载荷曲线。
轴承内圈的速度载荷:轴承内圈内侧(Rigid刚性单元)的主节点定义Z轴(6自由度)的速度(Slover→BOUNDARY→BOUNDARY _PRESCRIBED_MOTION_NODE(Vel)或者Analysis→Velocity)104.72 rad/s。
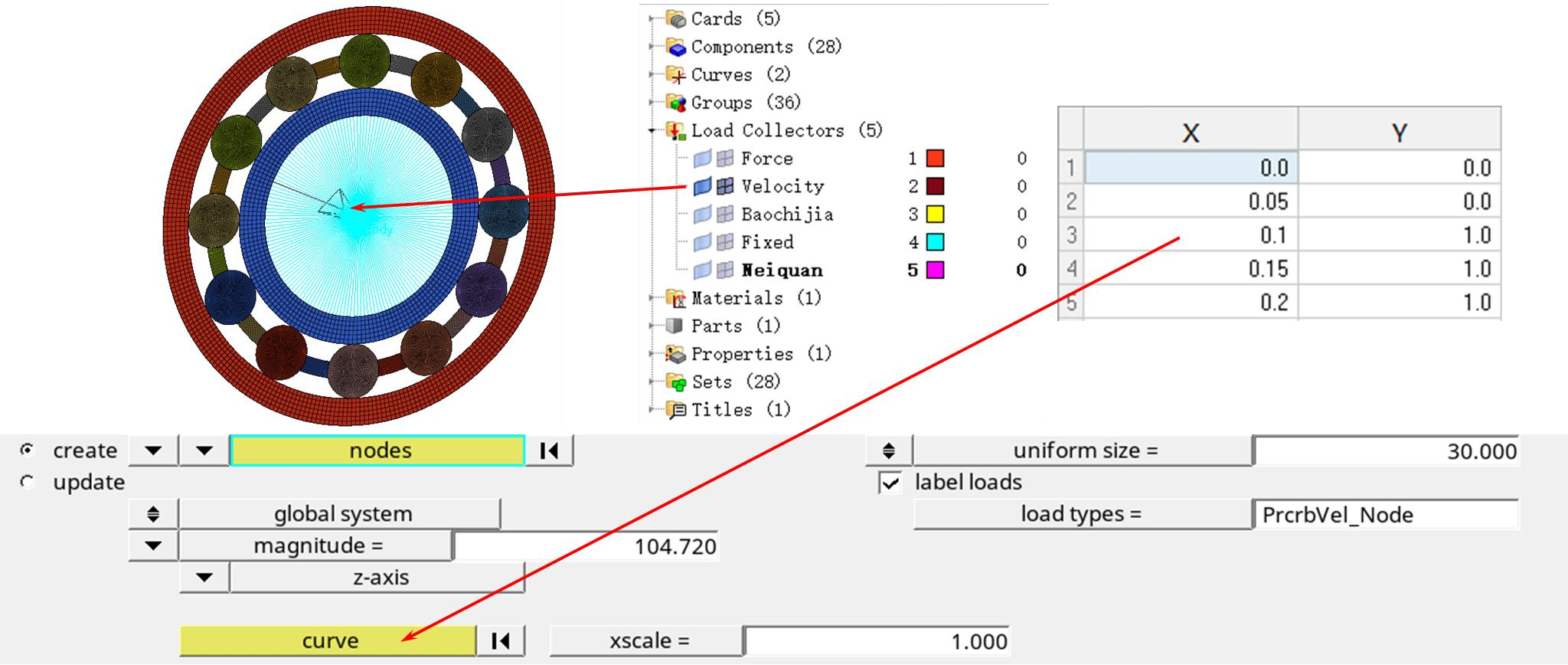
通过上图的方式定义的是Z轴平动速度(3自由度)而不是转动速度(6自由度),需要在卡片中更改自由度方向。

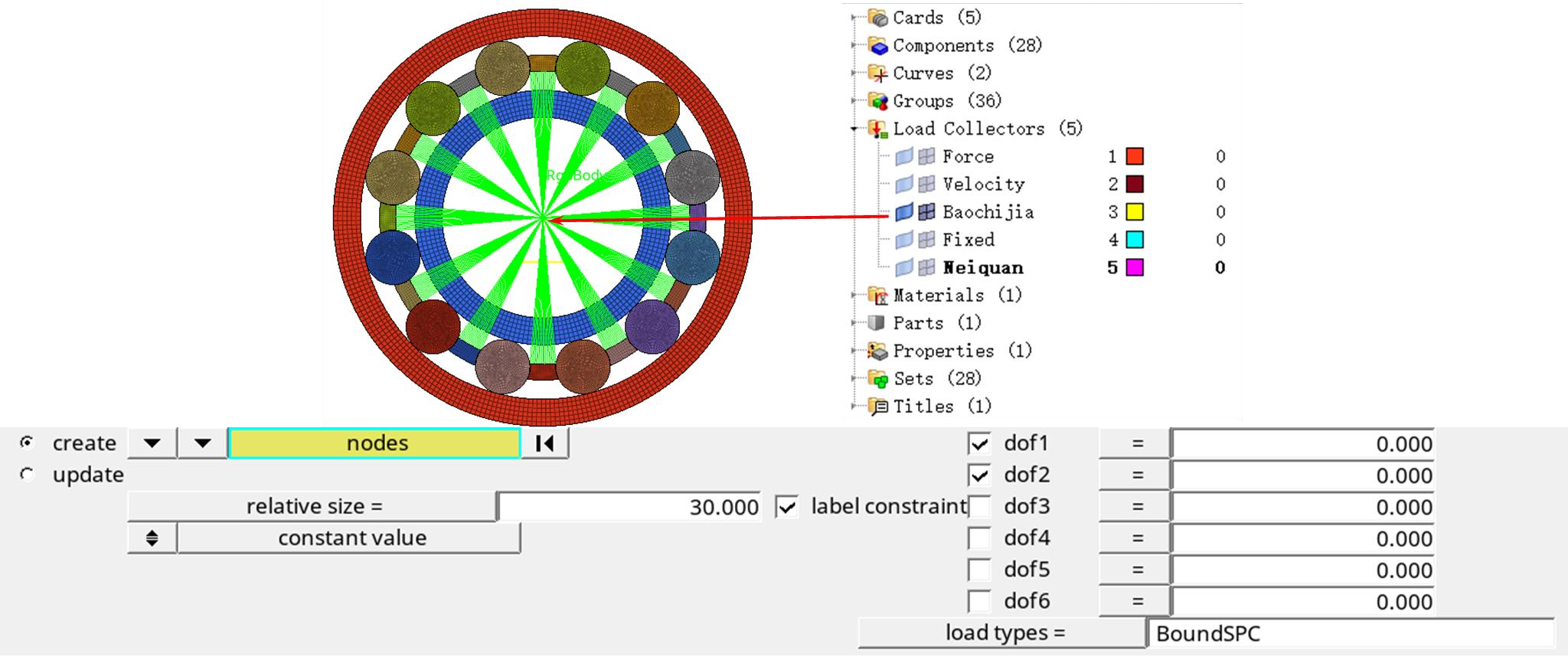
轴承内圈的边界条件(自由度约束):轴承内圈内侧(Rigid刚性单元)的主节点约束1自由度。因为在主节点的Y方向(2自由度方向)施加了100 N的力,所以要释放2方向的自由度,而6自由度方向要定义角速度载荷,释放6方向自由度。

轴承保持架的边界条件:轴承保持架内侧(Rigid刚性单元)的主节点约束1、2自由度,释放6方向自由度,因为保持架要转动。
求解时间为0.2 s:

输出400帧动画:每计算5E-4 s输出一帧动画。

定义质量缩放:

分析类型:

仿真结果:

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















