















































软件

产品


(1)轮式里程计
通过编码器获得轮式里程计的测量数据,车轮的转动被转换成线性位移。对于指定初始位置的运动估计,通过积分得运动增量,从而得到当前的位置 信息 。
· 该方法具有精度短、成本低、采样率高的优点
· 但车轮会产生打滑,定位误差会随着移动距离增加,影响长期精度
(2)惯性导航
惯性导航系统是自主的,不需要获取外界信息。
惯性传感器(陀螺仪与加速度计)测量角速度与加速度。陀螺仪积分可获得旋转,加速度的一次积分与二次积分分别获得速度与位置。
但积分势必会造成误差的累积。因此低精度的imu,无法单独用于精确定位。
(1) 全球卫星导航系统(GNSS)
GNSS是一种用于室外的导航技术。典型的如:GPS、北斗(中国)、伽利略(欧盟)、GLONASS(俄罗斯)··
通过三边测量,地面接收机可以利用卫星信号的运行时间和当前位置信息来计算其位置,这些信息包含在发射信号中。当接收机与若干卫星的确切距离已知时,就可以计算出接收机的纬度、经度和高度,其中3个是理论上的最小距离,4个可以校正接收机的 时钟 偏差。只要有足够的卫星覆盖,GPS可为户外导航提供了良好的绝对定位。
(2) 地标导航(Landmark Navigation)
地标导航地标技术用于已知环境下的导航。landmark可以是自然界特定的目标物,也可以是人工地标,可以被检测识别到。因此地标导航需要具备一个保存特征与精确地理位置的数据库。
人工地标是为定位和导航而添加到环境中的物体,而自然地标已经存在于环境中。每个地标必须有一个固定的位置。车辆需要一个关于它们特征和位置的数据库。一些地标可能包括额外的信息,如条形码。车辆必须能够从其传感器输入可靠地识别地标,并以确定其自身位置的方式处理数据。
(3) 基于地图的定位(模板匹配)
当移动设备在某个具有特定 地图 的环境中运动时,可以使用地图模板匹配。
使用传感器来感知本地环境,然后将感知结果与预存地图进行比较;若匹配成功,则可获得移动设备在具体环境中的位置与方向。通常使用相机与雷达作为该定位技术的传感器。
模板地图需要提前采集,用于室外环境时,通常会与GPS一起使用,以确定设备的路面所在位置。
使用两种及两种以上的定位方法,以获得更可靠的定位信息。
~GPS:
全球定位系统由24颗环绕地球的卫星组成,其平均半径为26.560公里。原则上,GPS接收器只需要三颗卫星的距离,就可以利用三边测量原理计算出它的三维位置。但是需要第四颗卫星来从系统时钟中估计接收机时钟的偏移量。GPS可能会由于信号阻塞、多径效应、干扰而出现中断。例如:城市、峡谷、隧道以及其他市内环境。
为提供更精确的实时定位信息,GPS需要与其他具有互补特性的系统集成,以满足GPS拒止情况下的导航定位。
INS与GPS性能
| 特性 | INS | GPS |
|---|---|---|
| 导航精度 | 短期精度高,随时间漂移 | 长期导航精度高,存在噪声干扰 |
| 惯性坐标系 | 使用 | 不使用 |
| 姿态信息 | 有 | 没有 |
| 感知重力方向 | 是 | 否 |
| 输出频率 | 高频 | 低频 |
| 自主 | 是 | 否 |
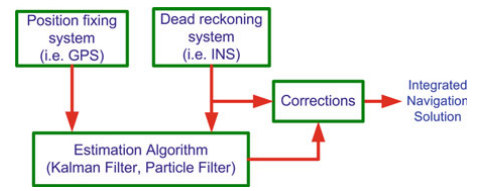
图1.典型的(INS/GPS)组合导航系统结构图
1.可获得更高精度的位置与速度
2.可以得到姿态信息
3.较高的数据输出频率
4.解决GPS信号阻塞时的导航问题
GPS与INS融合算法,主要有卡尔曼滤波(KF)、粒子滤波(PF)等。
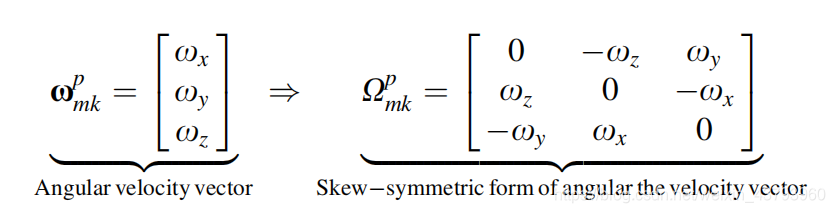
在惯性导航计算中,经常需要从一个坐标系到另一个坐标系的矢量变换。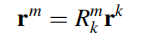
左乘旋转矩阵R: 其中R表示将向量r从k坐标系变换到m坐标系的矩阵。
(向量的上标表示其所在的坐标系,通常向量的上标会与矩阵下标抵消)
变换矩阵R的逆:描述了从m坐标系到k坐标系的变换;
如果两个坐标系是互相正交的,它们的变换矩阵也是正交的,此时矩阵的逆就等于它的转置。参考:正交矩阵与旋转矩阵的关系
(1) 地心惯性坐标系: Earth -Centered Inertial Frame(ECI 简称i系)
以地球质心为原点,不参与地球自转,OXi、OYi轴在赤道平面内正交并指向空间的两颗星,OZi轴平行与地球自转周并指向地球的北极。三个坐标轴指向惯性空间固定不动,这个坐标系是惯性仪表测量的参考标准。
(2) 地球坐标系:Earth-Centered Earth-Fixed Frame(ECEF 简称e系)
地球坐标系是指固联在地球上的坐标系,原点在地球的质心,它相对于惯性坐标系以地球自转角速度15.041088°/h旋转。OZe轴平行于地球自转轴并指向北极,OXe轴在赤道平面内指向格林尼治子午线,OYe在赤道平面内指向东经90°方向, OZe轴与OYe和OXe构成右手系。
(3) 地理坐标系:Local-Level Frame(LLF)
俗称东北天坐标系,原点与传感器重心重合,y轴指向正北c. x轴指向东, z轴穿过地心指向天。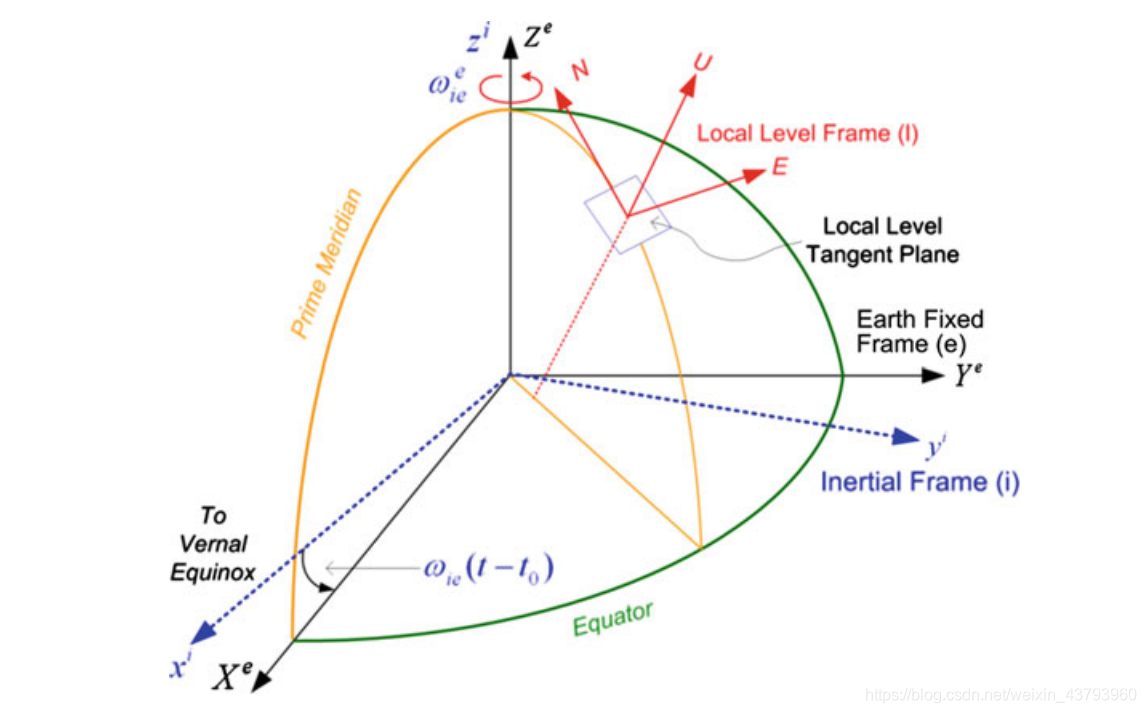
(4) 载体坐标系:Body Frame (b系)
在可移动的载体中,加速度计传感器的敏感轴与安装传感器的移动平台的轴重合。这些轴通常被称为body frame。
定义:原点与载体重心重合, y轴指向前方(横滚轴Roll), z轴指向垂直向上,也被称为偏航轴(Yaw),x轴为俯仰轴(Pitch),xyz构成一个右手坐标系,可直观理解为“右前上”坐标系。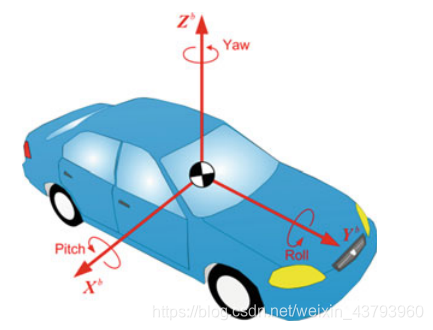
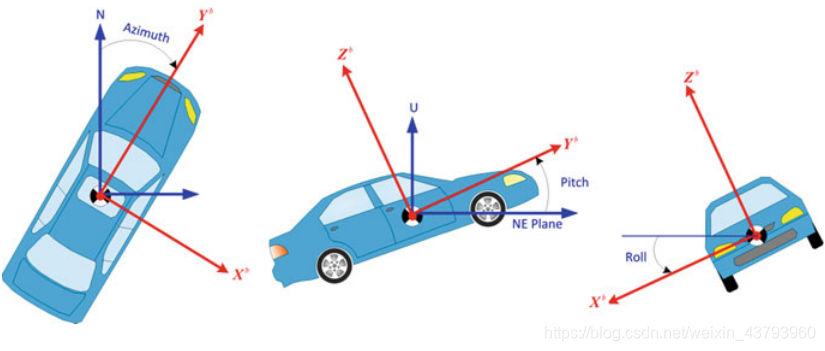
其中载体系相对于地理坐标系的欧拉角:Roll、Pitch、Yaw表示如上图。
将一个矢量从一个坐标系转换成另一个坐标系可以使用方向余弦、旋转(欧拉)角或四元数。它们都涉及一个旋转矩阵,称为变换矩阵或方向余弦矩阵(DCM)。在旋转矩阵的表示中,下标表示向量来源的坐标系,上标表示目标坐标系。例如: k系中的向量r变换到 l系中,可由下式表示: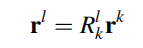
欧拉角与旋转矩阵
坐标系a可通过旋转矩阵变为坐标系b,也可以通过对z,y,x轴逐步进行旋转得到。
如:绕z轴旋转 gama角度,可得到向量r1在a系与b系之间的旋转矩阵: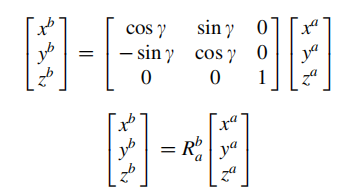
同理:
绕x轴的旋转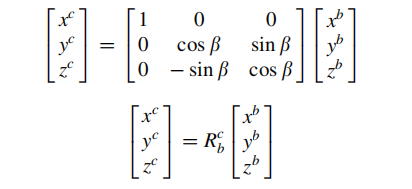
绕y轴的旋转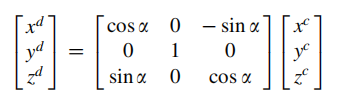
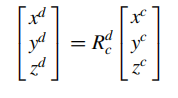
将三次旋转连续左乘(顺序 z,x,y),可以得到:

*对于小角度的旋转,有以下近似:
通过小角度近似,旋转矩阵可近似为: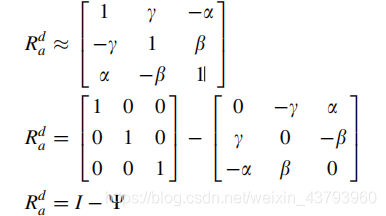
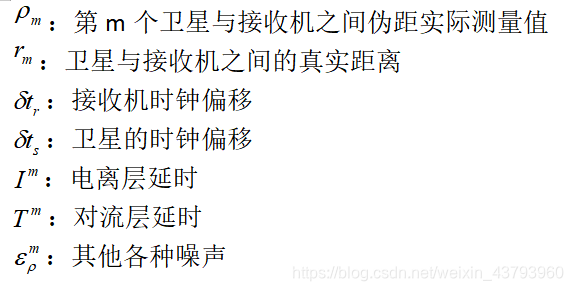
全球定位系统(GPS)由美国国防部在20世纪70年代开发。GPS的定位基础是24颗卫星组成的网络。每颗卫星发送一个包含伪随机噪声(PRN)码与导航信息的无线电信号。接收机通过PRN码获得无线电信号的传输时间,传输时间乘以 光 速可初步计算卫星与接收机之间的距离(称为伪距离)。
根据导航信息计算卫星的位置。根据三颗卫星提供的信息,接收机通过三边测量法计算出自身的纬度、经度和高度;可根据第四颗卫星的信号来消除接收机的时钟偏差。
GPS观测主要有伪距测量、载波相位测量和多普勒测量三种
伪距是卫星和接收机之间距离的度量。 传输时间由导航消息计算,接收时间由接收信号(PRN码)与其接收方生成。伪距( p )的计算方法是取这些时间的差值,并将其与光速 c 相乘:
传输时间由导航消息计算,接收时间由接收信号(PRN码)与其接收方生成。伪距( p )的计算方法是取这些时间的差值,并将其与光速 c 相乘:
实际的伪距测量包含了很多干扰因素:
接收机到卫星的距离也可以通过载波信号的相位来测量。
GPS接收机可以精确地测量一个周期的分相,但是从卫星到接收机的完整周期的总数最初是未知的。这称为整数模糊(IA)。IA解析后,通过将载波波长乘以完整周期(N)和小数部分,可以计算出距离,这个距离比PRN码计算出的距离精确得多。
考虑时钟偏移、大气延时、以及测量误差,可得到以下式子:
其中: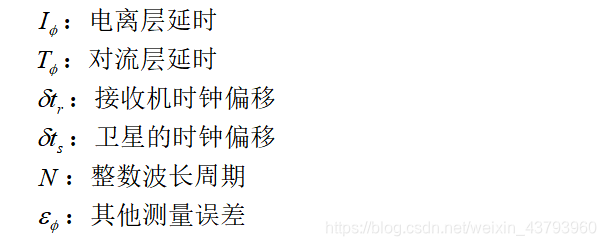
将上式与波长相乘,可将载波相位测量转换为米的单位:
多普勒效应是由发射器和接收器的相对运动引起的电磁信号的频移。
基于这一现象,一些GPS接收机也通过测量接收信号的多普勒频率来计算用户的速度。
发射信号的多普勒频移( fd )、视线距离率( r )和波长之间的关系为:
GPS最初以两个频率发送测距信号。
GPS卫星在两个无线电频率L1和L2(分别为1575.41和1227.60兆赫)传输信号。每个频率的测距码调制被称为伪随机噪声(PRN)序列或精确测距码。
单GPS接收器的精度约为5至30米。接收器必须确定卫星的位置,以便使用导航信息将距离测量值转换为用户的位置和速度。导航信息与PRN代码一起叠加在LI和L2载波上。该消息是二进制编码数据,包括关于卫星状态、星历(其位置和速度)、时钟偏差参数等信息。
美国政府正在不断提高GPS服务的性能,三个新的信号称为L2C, L5和LIC正在被引入民用。
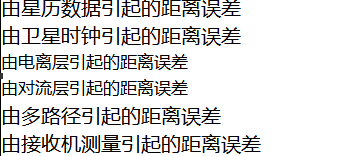
GPS接收器使用三边测量原理,通过对至少四颗卫星进行距离测量来计算其位置。这些测距测量受到来自各种来源的误差的干扰。
随着时间的推移,卫星时钟会偏离GPS系统的时间。
控制端根据监测站提供的卫星时钟数据观测数据,估算出卫星时钟的校正参数,并上传到卫星;卫星再将这些参数广播到导航信息中,使接收机在计算测量距离时对卫星时钟误差进行校正。
为降低成本,接收机时钟比卫星时钟精度低得多,并带有偏差。
在使用三个卫星伪距估计当前位置时,如果可获得第四个卫星的伪距,那么接收机的时钟误差可进行同步估计,通常采用一个Kalman滤波器来实现。
电离层作为大气层的一部分,其中包含电离气体(自由电子和离子),并占据地球表面约60至1000公里处的空间。这一层的电离水平随太阳活动而改变,影响电离层各层的折射率,从而改变GPS信号的传播时间
同时,卫星的高程也增加该误差的可变性,因为来自较低高程卫星的信号通过电离层的距离比来自较高高程卫星的信号更大。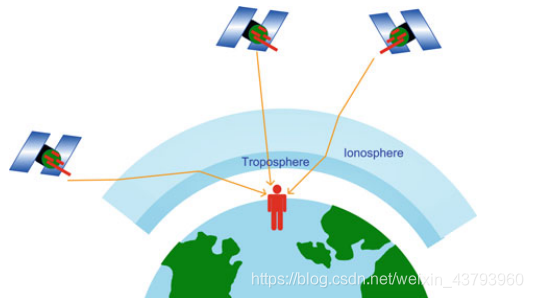
伪距和载波相位的电离层延迟相等,但符号相反
其中f为载频,TEC为总电子数。TEC定义为沿电离层传输路径的1 m2横截面管中电子的数量,它在时间和空间上都是变化的。
同时配备了L1和L2的双频GPS接收机能够更准确地计算电离层延迟。
对流层是地球表面8至40公里的大气部分,主要由干燥气体(N2和O2)和水蒸气组成。与电离层不同,对流层是电中性的,对于GPS频率来说是不分散的。但是由于存在折射,因此信号的传播速率相对于光速会衰减。L1和L2载波的对流层误差相同。
对流层延迟有干延迟和湿延迟之分。湿分量占对流层延迟的10%,由于水汽含量在局部范围内变化,因此很难建模。干分量模型更完善,占对流层延迟的90%。对流层延迟模型包括Saastamoinen模型、Hopfield模型和Chao模型。
多路径误差是城市环境中GPS信号的主要误差来源,GPS信号经过高楼建筑等物体表面,经过反射后到达接收机。间接到达的信号被延迟,并且信噪比很低。多路径误差可能导致位置误差超过10米。
载波相位测量的多径误差比伪距测量的误差低两个数量级。
卫星在空间中的实际位置与接收机通过星厉数据计算的卫星位置之间的误差
控制端根据卫星先前的运动和地球引力来预测卫星轨道误差,并将该误差上传到卫星,作为星历数据广播给用户。因为星历模型是一条拟合实测轨道的曲线,它还包括相对于实际轨道的时变剩余误差。通常这个误差在2到5米之间。
GPS接收机的随机测量噪声。
它是由天线电路、电缆、热噪声、射频信号干扰、信号量化和采样的累积效应引起的。
在使用一些误差模型对测量值进行处理后,还存在一些剩余误差;将伪距测量的剩余误差结合起来,称为用户等效距离误差(UERE)。假设误差源可以分配到单个卫星伪距的,则这些误差是不相关的,那么一个卫星的综合UERE近似为一个零均值高斯随机变量:
目前,一个独立GPS典型精度为:水平约为10米,垂直约为15米。这对于许多常用导航应用程序来说已经可以满足需求,但是对于一些重点应用项目来说还需要更高的精度,为了实现这一目标,需要使用各种其他系统来增强GPS。
为了达到更高精度的要求,可通各种增强系统:
惯性导航理论依据:
牛顿第一定律(在不受外力作用下,物体将保持静止或匀速直线运动)
牛顿第二定律(物体加速度的大小跟作用力成正比,跟物体的质量成反比;加速度的方向跟作用力的方向相同)
平台式惯导:(下图a所示)惯性传感器安装在一组框架上(平衡环),通过扭矩电机根据陀螺仪感应的旋转来实现平台的旋转,使得平台始终与导航系保持一致。因此,加速度计的输出可以直接在导航系的速度与位置上进行积分。由于平台式惯导系统在机械构造上非常复杂并且价格昂贵,所以应用十分有限。
捷连式惯导:(图b所示)惯性传感器被刚性安装在移动平台的载体上,平衡环由计算机算法代替,通过坐标系变换算法来模拟平台的旋转。利用陀螺仪测量角速率来不断更新载体系和导航系之间的相对姿态。然后,加速度计的测量值通过旋转矩阵到导航系中,计算加速度。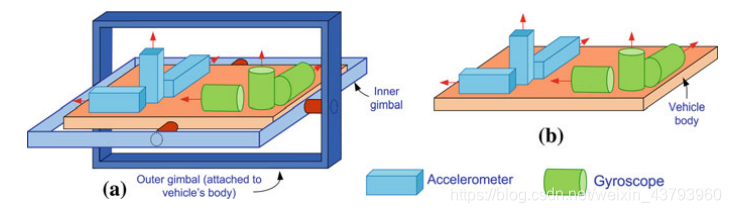
由于捷连式惯导具备:可靠性、灵活性、低功耗、轻量、价低等优点,目前获得广泛用。
INS主要由三个主要模块组成:惯性测量单元、预处理单元、机械化模块。
IMU使用3个相互正交的加速度计和陀螺仪: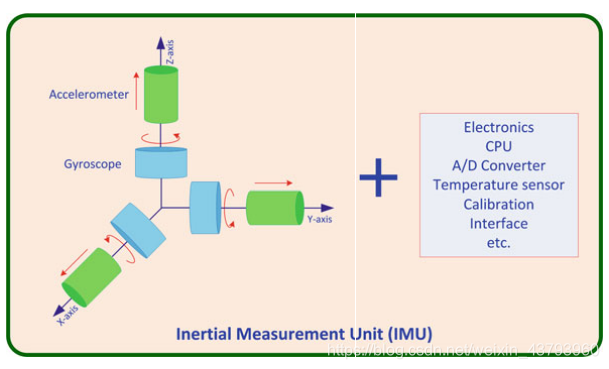
当三轴加速度计静置于水平面平行时,此时加速度计测量的是地球重力加速度(其中包含一些误差与噪声),重力矢量垂直向下,与载体系的z轴重合,因此三轴的比力分别为:
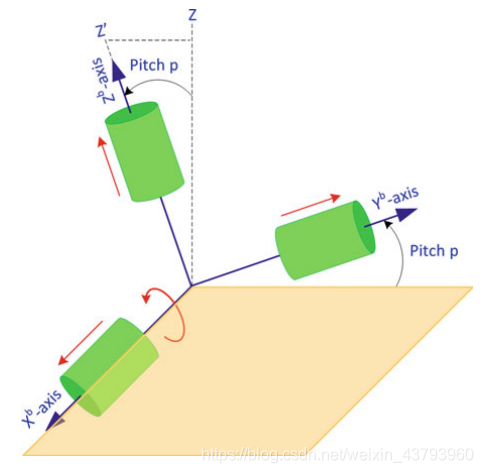
若三轴加速度计的放置不与水平面平行,而是绕着x轴旋转,与地面形成一个角度p,如图所示:
此时z轴从原来的位置(虚线z)倾斜到一个新的位置z’。角度p被称为俯仰角。此时的yb、zb轴均可感知到重力矢量的分量,各轴比力为:
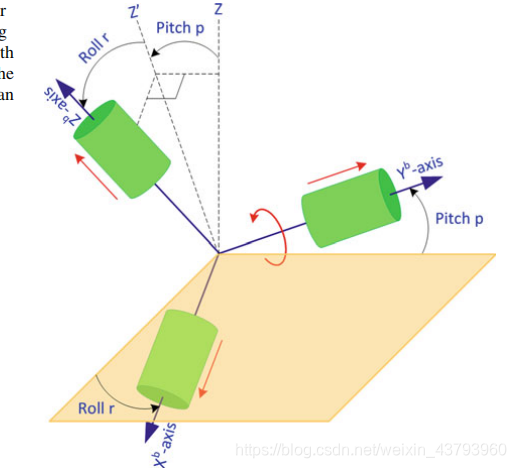
若再将传感器绕其y轴旋转,使其x轴与z轴偏移一个角度r,此时所有轴上都能测量到重力矢量分量:
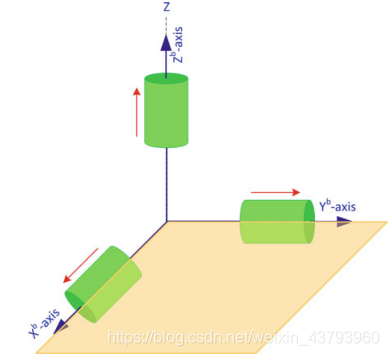
假定当前载体系与ENU系(东北天)重合,三轴陀螺仪可以测量由于地球自转而产生的静止分量,也可以测量由于车辆行驶时经纬度的变化率而产生的非静止分量。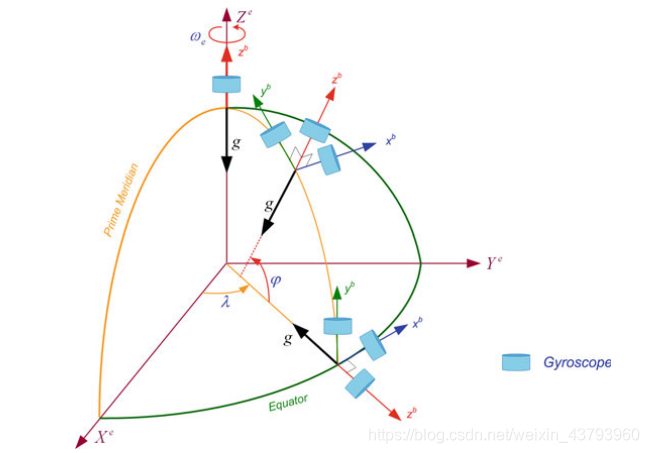
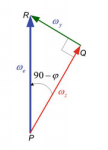
在静止条件下,陀螺在地球表面可以感知到地球的自转角速度We;此时陀螺仪各轴上的测量值取决于载体所在的纬度。由上图可知,Wx始终为0,当陀螺仪位于北极N时,Wz=We;当器件位于赤道时,Wy=We,当器件位于中间纬度 fai 时,满足以下公式:
所以,陀螺仪的静止分量可表示为: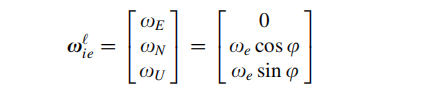
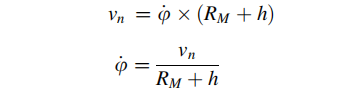
在运动条件下,陀螺仪测量到的是载体各轴上的旋转角速度与地球自转角速度在各轴上的分量,以local-frame作为导航坐标系,假定物体向东北方向移动,则x轴(东向)上的角速度相当于移动物体在纬度上的移动速率: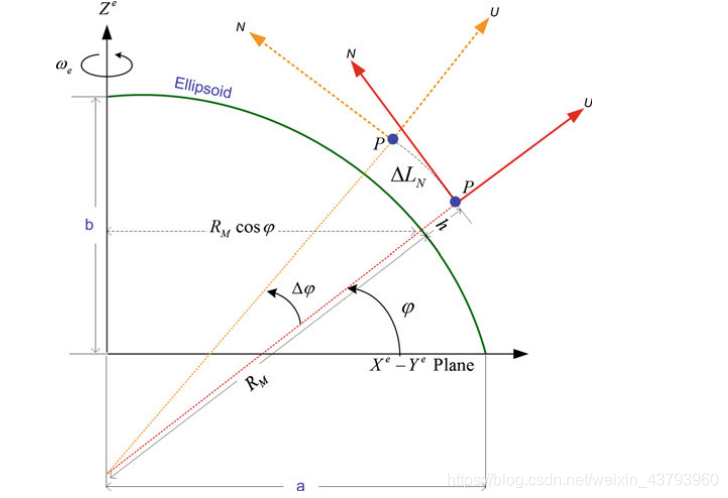

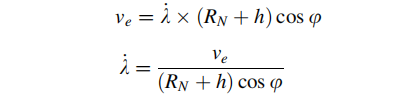
同理,东向的速度可表现为经度的变化率,继而可以表示为与地球自转轴重合的角速度(由于运动造成的),该角速度可被y与z轴的陀螺仪感知: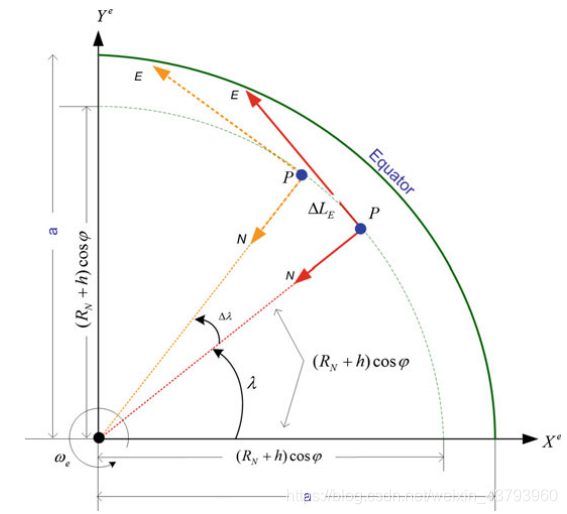

所以,陀螺仪的非静止分量可表示为: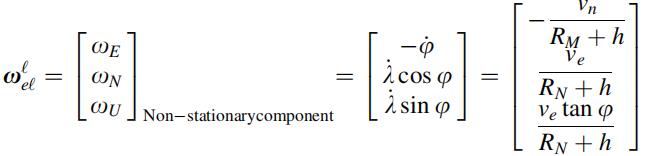
惯性传感器误差可分为两大类:系统误差与随机误差。
(1)系统偏置: 当无输入时,传感器自身存在的偏移量。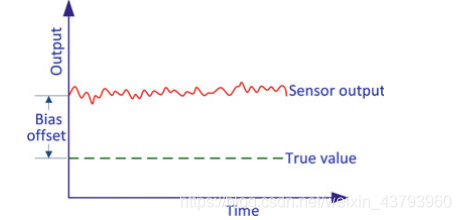
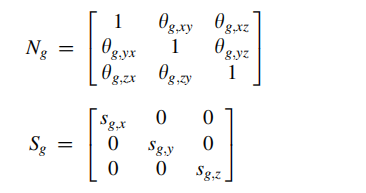
(2)尺度因子误差: 传感器应输出的实际值与输出值之间的比例关系。
尺度因子误差引起的加速度计输出误差与敏感轴上的真实比力成正比,同样陀螺输出误差与敏感轴的真实角速度成比例。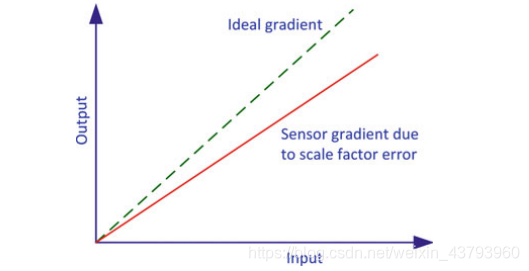
(3)非线性误差: 输入与输出之间的非线性关系。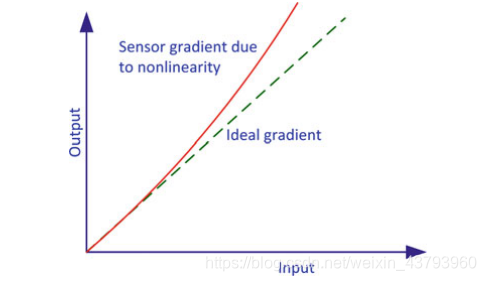
(4)尺度因子符号不对称: 正、负输入的尺度因子不同。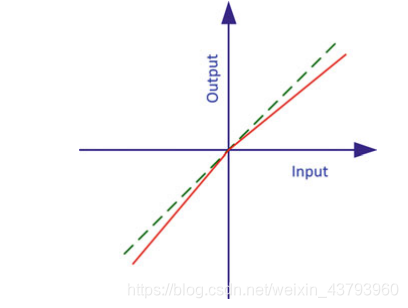
(5)死区: 有输入的情况下,输出为0的范围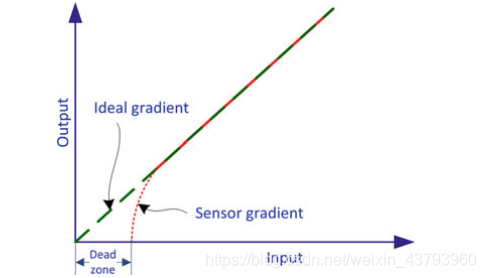
(6)量化误差: 将连续信号转化为离散信号是产生的误差。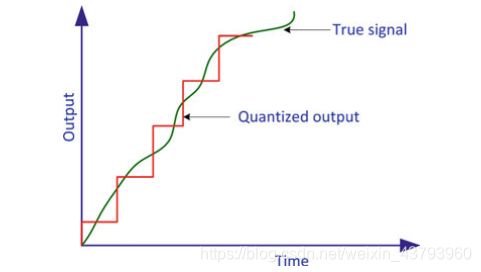
惯性传感器受到各种随机误差的影响,通常采用随机建模的方法来减轻这些误差的影响
(1)偏置漂移(Bias Drift): 运行过程传感器偏置中随时间随机变化。称为偏差漂移。初始偏置是确定性的,而偏置漂移是随机的。偏置漂移的一个原因是温度的变化。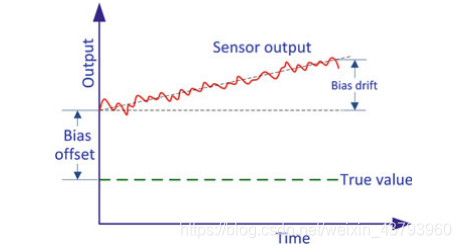
(2)高斯白噪声: 零均值的高斯白噪声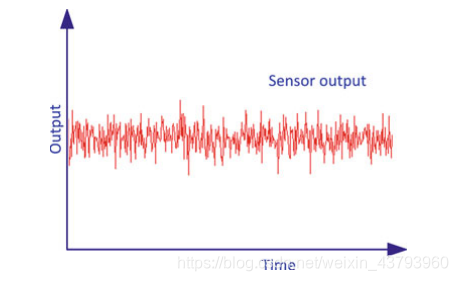
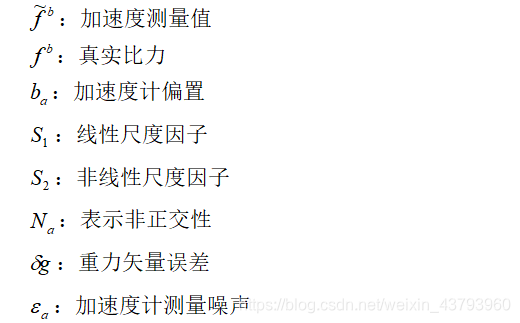
(1)陀螺仪测量模型:
角速度的观测方程:
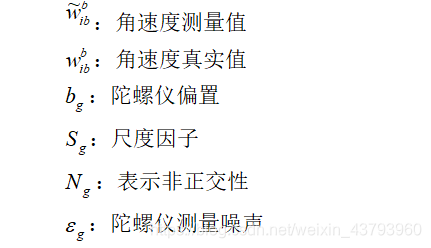
(2)加速度计测量模型:
加速度的观测方程:
4.4.4 惯性传感器误差的校正
加速度计误差校正:


陀螺仪误差校正:
纬度为fai的载体系,若可感知到地球自转,则:
载体系中,指向天向的敏感轴,可以感知到地球自转的分量,并可以以此来计算校正参数: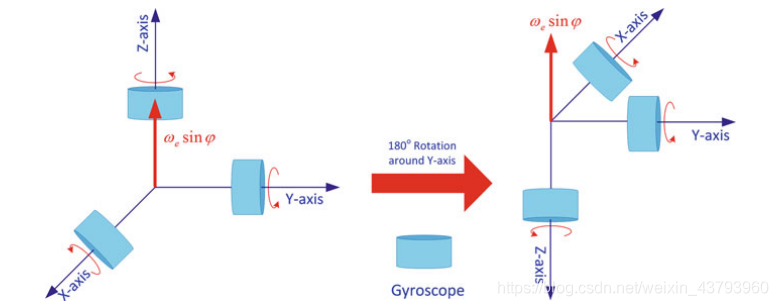


对三个陀螺仪中的每个轴重复这个过程,以获得它各轴的偏差和比例因子。
低成本的陀螺仪无法探测到地球的自转速度,可以以恒定速率表60 °/ s旋转(或任何其他速率高于陀螺仪的检测阈值的转速),替换方程中的 We sin(fai).
传感器的加速度和转速进行一次积分,计算出速度和姿态,再对速度进行积分得到位置。导航方程需要获得位置、速度和姿态的初始值。这个过程叫做位置和速度的初始化以及姿态的校准。
*位置和速度初始化:
位置可以使用车辆开始移动前的最后一个已知位置进行初始化。对于INS与其他(通常是GPS)集成的系统,外部导航系统可以提供一个初始位置作为先验。
如果载体是静止的,那么速度可以初始化为零。如果载体是移动的,那么初始速度可以通过外部导航提供。
*姿态对齐:
两个步骤:首先,通过初始化俯仰(p)和横摇(r)角将载体系与"东北"对齐,再将航向角(y)与天向对齐。
当车辆静止时,加速度计的俯仰轴与滚转轴由于与地平面存在倾斜,因此可感知到重力矢量的分量。
在载体系静止的情况下,通过加速度测量的比力,可以计算出初始姿态角中的pitch和roll:
其过程如下:
已知local-frame下的重力矢量为:
停止情况下加速度计测得的比力,可表示为“东北天”系下的重力矢量左乘旋转矩阵,即:从地理系变换到载体系下的结果:
假定载体的俯仰(x:pitch)、横滚(y: roll)、航向(z: yaw)三轴上的姿态角分别为:p、r、y;旋转矩阵可以由下式表示:
将旋转矩阵代入得到:

由上式可知,通过静止时的加速度测量值感知重力矢量分量,可以得到与俯仰角(p)与横滚角(r)相关的方程,因此可以求出相应的姿态角:
而航向角(y)是无法通过坐标轴与水平面对齐的方法得到(因为改变航向角,重力矢量始终指向下不发生变化),要想求出航向角,还需要借助陀螺仪的测量。
若陀螺仪可以感知到地球自转,则:
在初始对准过程中,由于保持静止,后一项为0:
其中:


地球自转角速度We约为:15.04deg/h
代入以上式子,则载体系相对于惯性系的旋转角速度为:
因为p和r在上一步骤中已经通过加速度测量值求出,因次在该式中,可以将Wx乘以cos( r),Wz乘以sin( r),得到:

因此:
求出航向角为:
相对于地平面,俯仰角与横滚角其实很小,可做以下近似:
则航向角可简化为:
注意: 需要注意的是,使用陀螺仪感知地球自转来求航向角的方法只对较高精度的IMU可行,对于低精度的IMU,其噪声阈值超过了地球自转信号,因此无法探测到地球的自转。对于这些低精度的IMU,航向角的估计需要通过罗盘、磁力计、或者GPS获得。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















