















































软件

产品


这次用Ls-dyna软件模拟鸟撞分析,前处理还是使用Hypermesh软件,但还需要用到LS-PrePost软件将网格节点转化为SPH粒子。
仿真的Model图形树信息:

仿真的Solver图形树信息:

仿真模型比较简单,共2个Component,分别为鸟(Bird)与叶片(Blade),鸟通过SPH粒子模拟,叶片通过壳单元模拟。

Material(材料):
仿真的单位制为m、N、kg、Pa、s。鸟的材料为水,MATL9号材料,并定义密度(Rho),压力(PC)与粘度系数(MU)。叶片的材料为钛合金,MATL24号材料,定义密度(Rho)、弹性模量(E)、泊松比(PR)与屈服强度(SIGY)。

Property(属性):
鸟利用SPH粒子模拟,属性的关键字为SECTION_SPH,并定义EOS状态方程。叶片通过壳单元模拟,叶片厚度为0.003m。

Set集合:
共定义2个Set集合,分别为鸟(Bird)所在Component的所有节点(Node)的Set集合与叶片(Blade)所在Component的零件(Part)Set集合。

Groups(接触):
定义叶片与鸟的接触对,叶片为主面,鸟为从面,但是不同于之前案例中使用的面与面的接触类型,鸟与叶片的接触类型为点与面的接触(Card Image为NodesToSurface),Options为Automatic,其中静摩擦系数为0.1,动摩擦系数为0.2。

Load Collector(载荷集合):
载荷集合共有2个,鸟飞行的速度与叶片的转速。

Blocks(盒子):
对于复杂的接触问题,可以使用BOX定义一个接触区域,此时软件只会考虑BOX区域内的接触问题,从而节省大量的计算时间。共定义了2个BOX区域,红色的是叶片接触的区域,绿色的是鸟的接触区域。

Control Cards(控制卡片):
仿真时间为0.02s,每0.0002s输出一帧动画,计算时间步长系数为0.6。

至此Hypermesh 的建模过程到此结束,导出K文件即可。然后需要利用LS-PrePost软件打开K文件,将鸟所在Component的网格节点转变为SPH粒子。
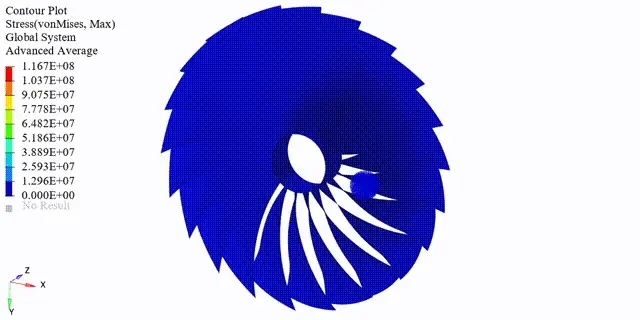
仿真分析结果:

仿真动画:
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















