















































软件

产品


1、机器人的配置,这里我们以Abb机器人120为例子,如图1-1所示,该机器人右Axis1-6,6个轴的自由度。
(文章末尾有本章模型资料下载)。

图1-1 abb120机器人的自由度
2、了解一下该机器人的基本信息,如图1-2所示可知120的最大运行距离为580mm最高pos1为982mm,如图1-3所示可知1到6轴的限位。
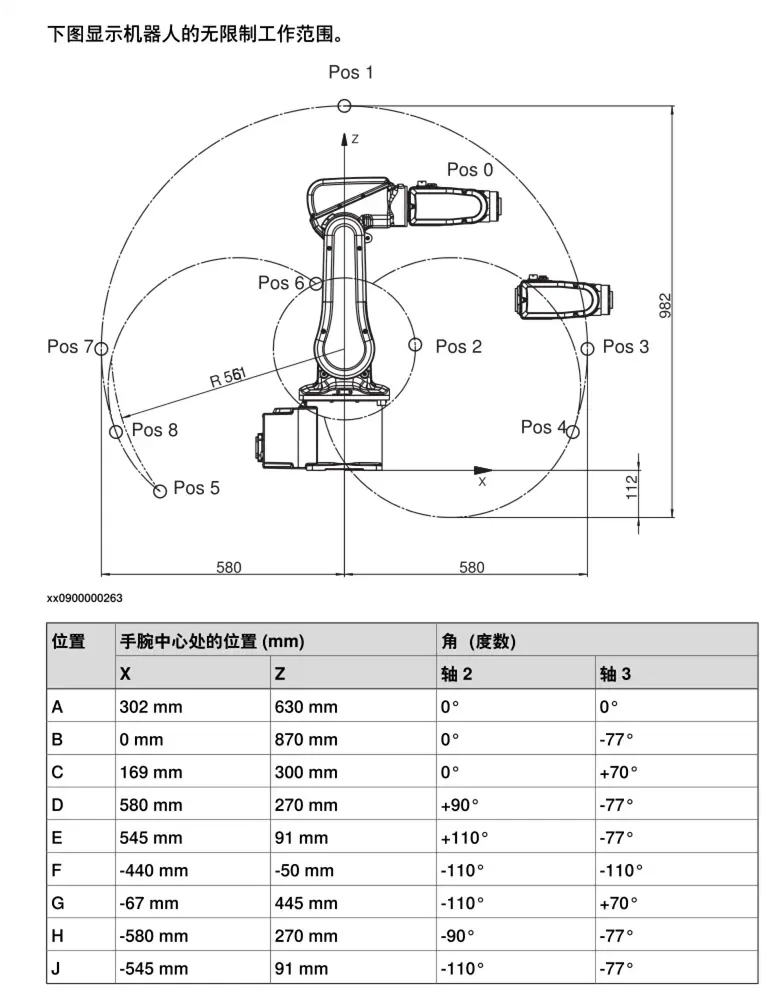
图1-2 abb120机器人的活动范围
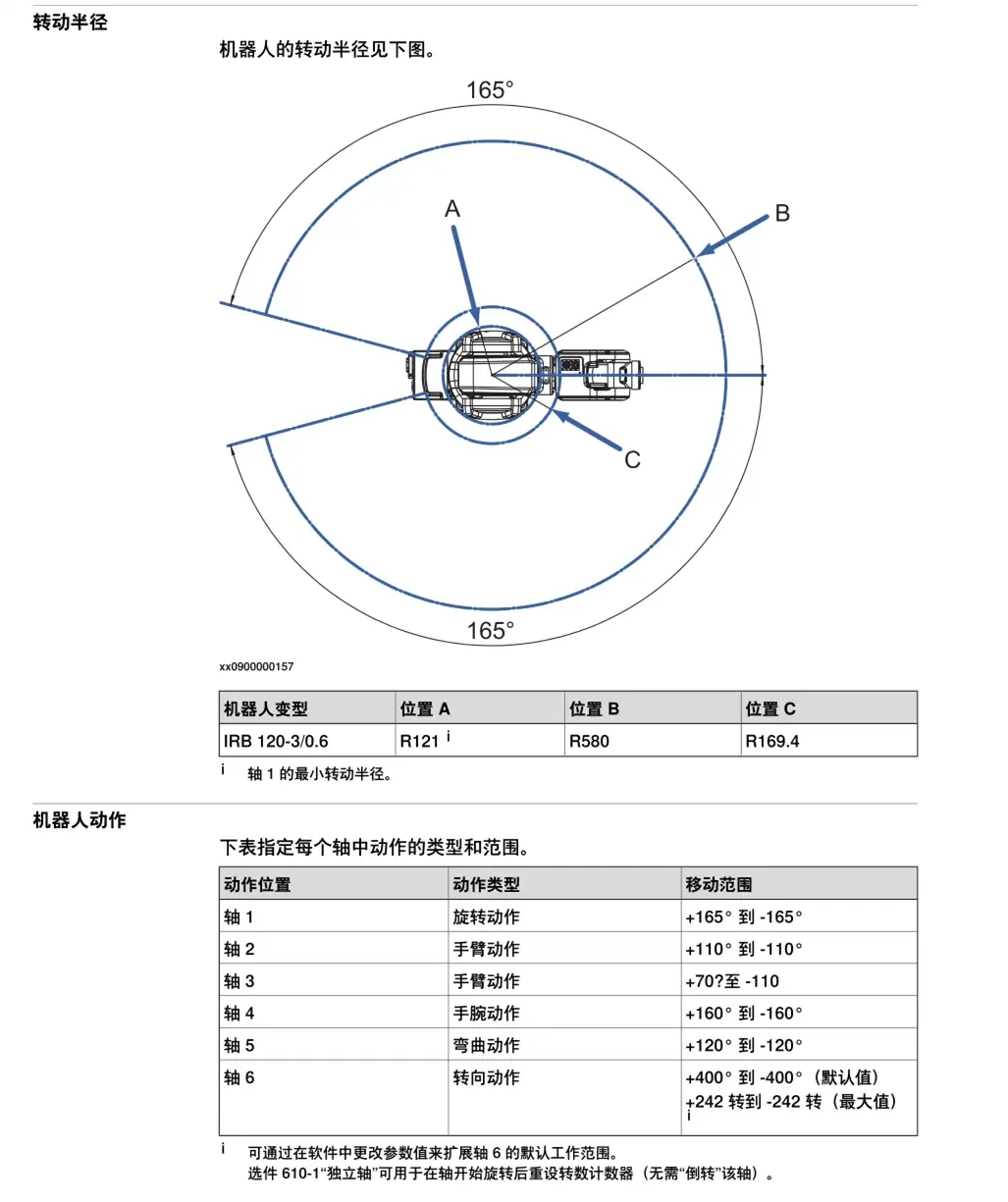
图1-3 abb120机器人各轴的上下限
3、对机器人的各轴进行校准,避免与真实机器人动作差距太大,如图1-4,1-5所示。
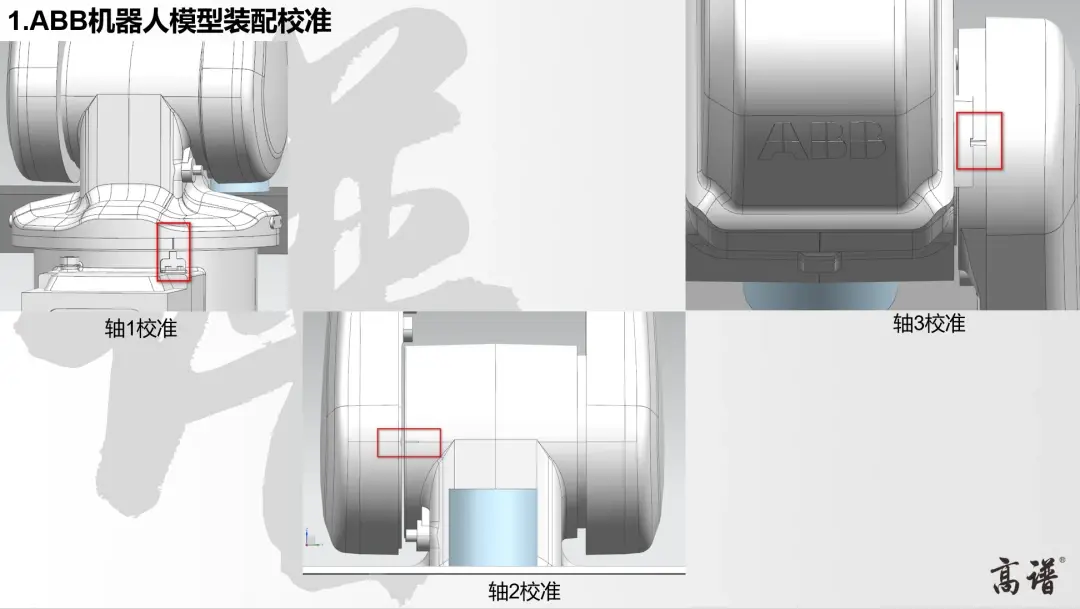
图1-4机器人轴1到3的校准
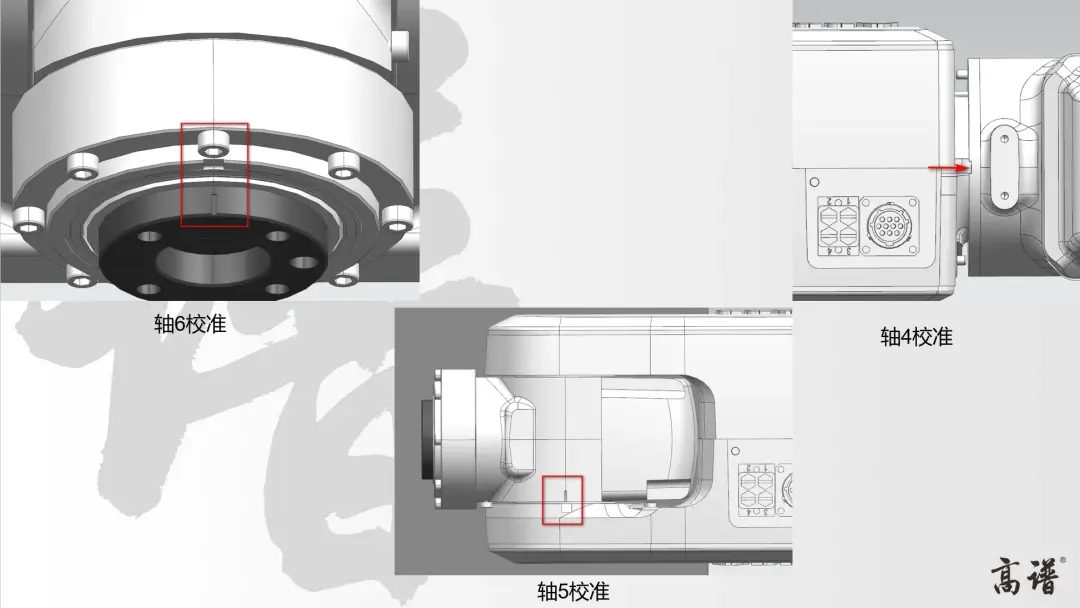
图1-5机器人轴4到6的校准
4、由于在MCD中所有会运动的东西都需要配置刚体,对机器人的各轴进行刚体配置
如图1-6,1-7所示。

图1-6机器人轴1到3刚体
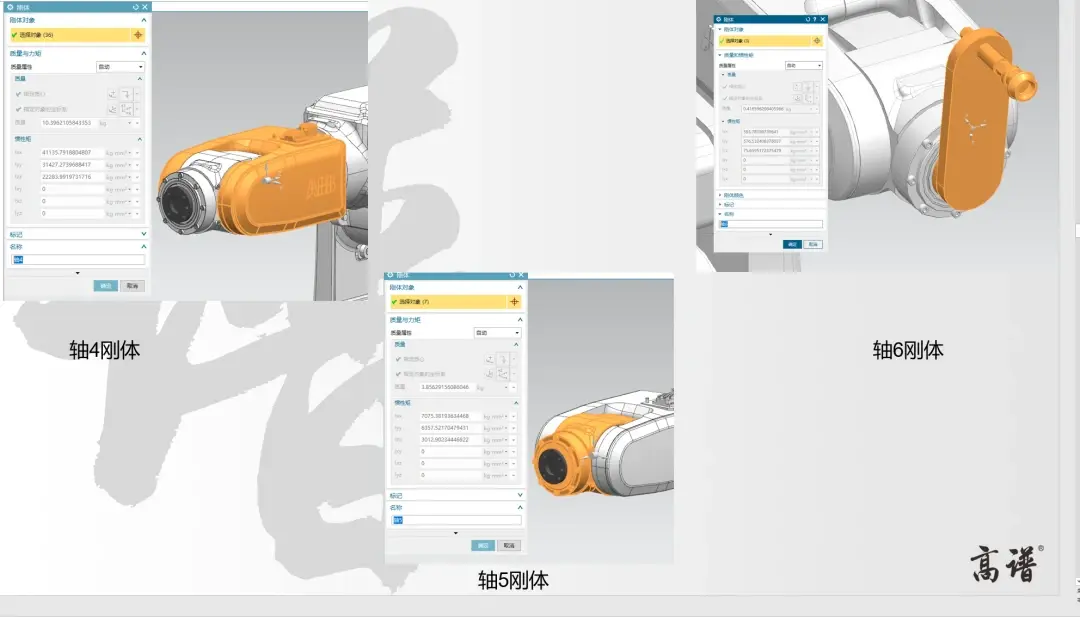
图1-7机器人轴4到6刚体
5、在MCD中刚体的运动逻辑由运动副支持,由图1可知机器人各轴为旋转运动,故对机器人的各轴进行铰链副配置如图1-8,1-9所示。

图1-8机器人轴1到3铰链副的配置

图1-9机器人轴4到6铰链副的配置
6、为了实现机器人的吸盘功能,需要使用到该握爪的功能,根据类别对机器人的进行吸盘配置如图1-10所示。
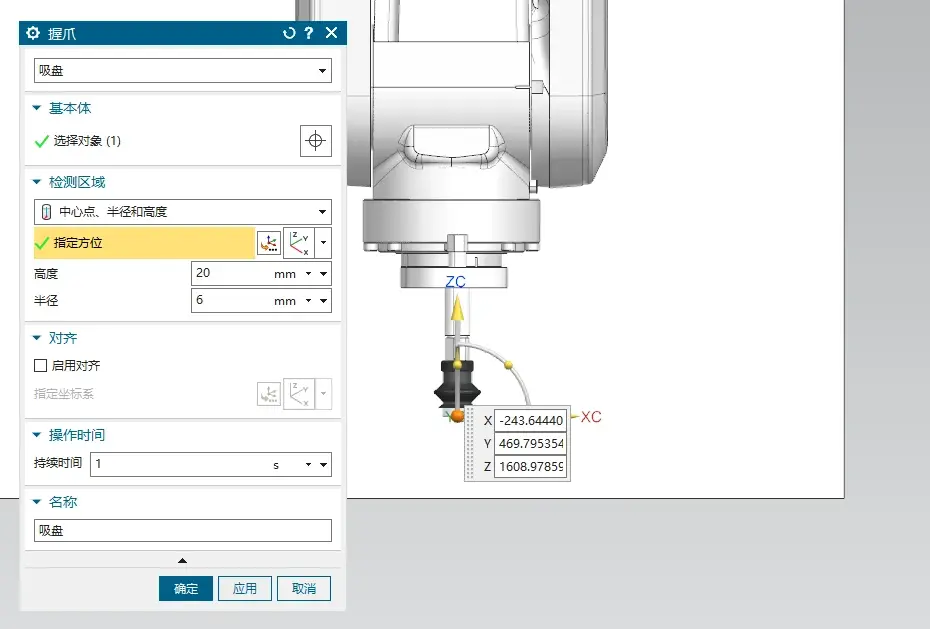
图1-10配置吸盘的功能
7、这里为了实现机器人将圆形物料进行搬运的动作需要对物料的刚体与碰撞体进行配置如图1-11,1-12所示。
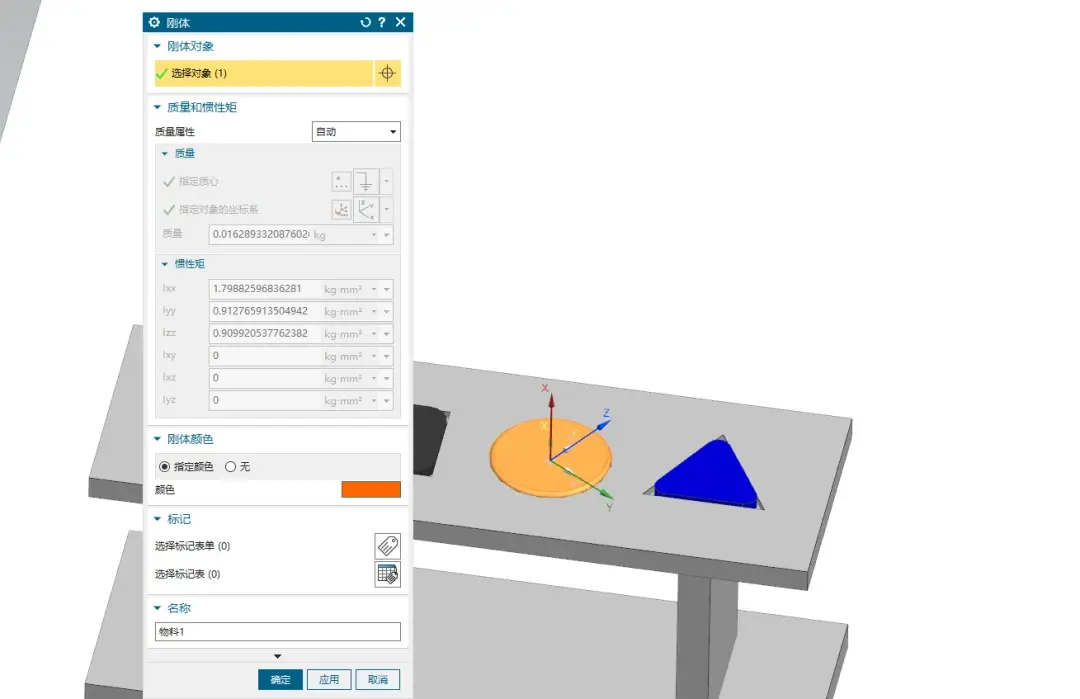
图1-11配置圆形物料的刚体属性
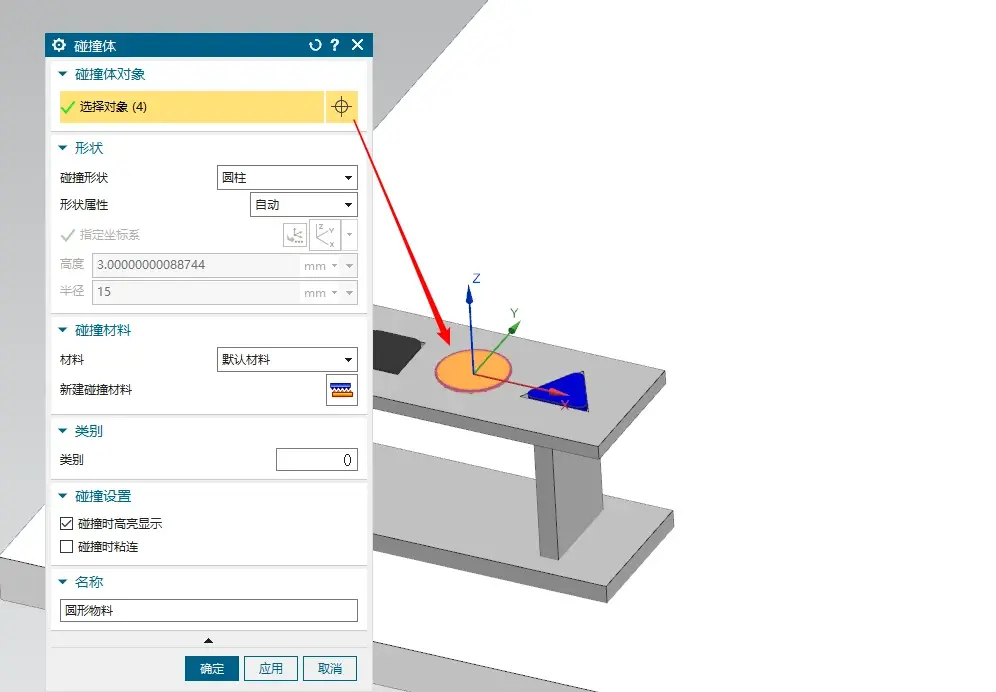
图1-12配置圆形物料的碰撞体
8、做为载体需要对料盘与仓库的碰撞体配置如图1-13,1-14所示。
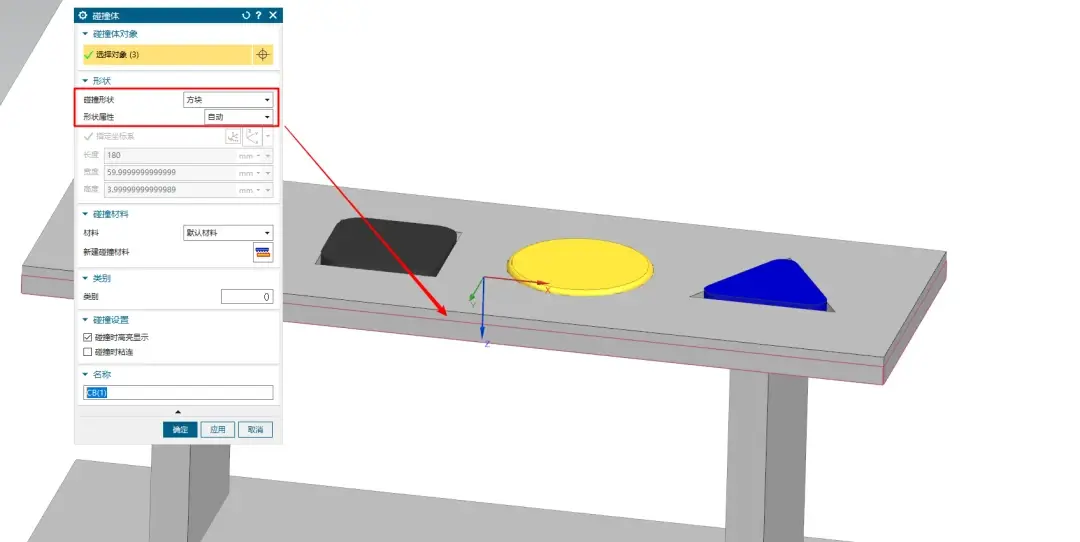
图1-13配置料仓碰撞体

图1-14料盘碰撞体
9、对机器人的进行反算机构配置如图1-15,1-16所示。规划机器人抓取到释放的动作路径。
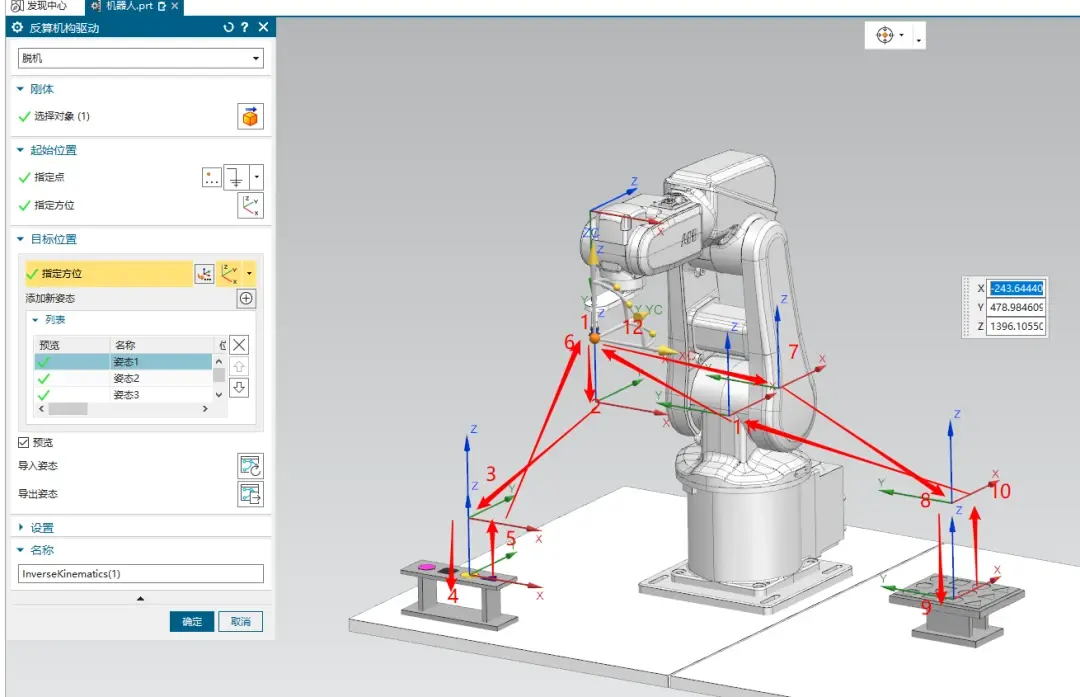
图1-15路径约束的位置配置
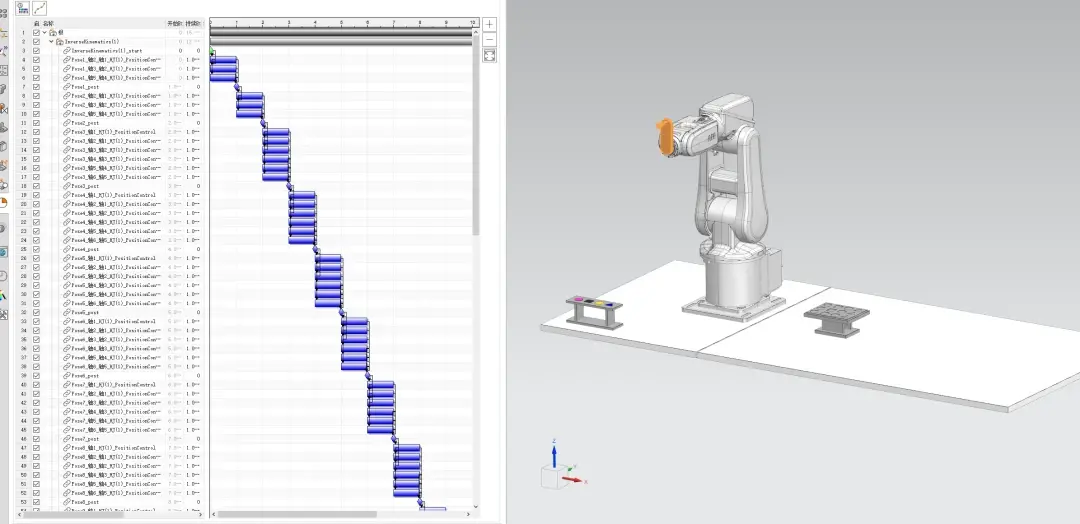
图1-16自动生成的仿真序列
10、配置信号适配器如图1-17所示导入握爪的抓握与释放参数,在信号中添加2个输入信号,公式如图所示。
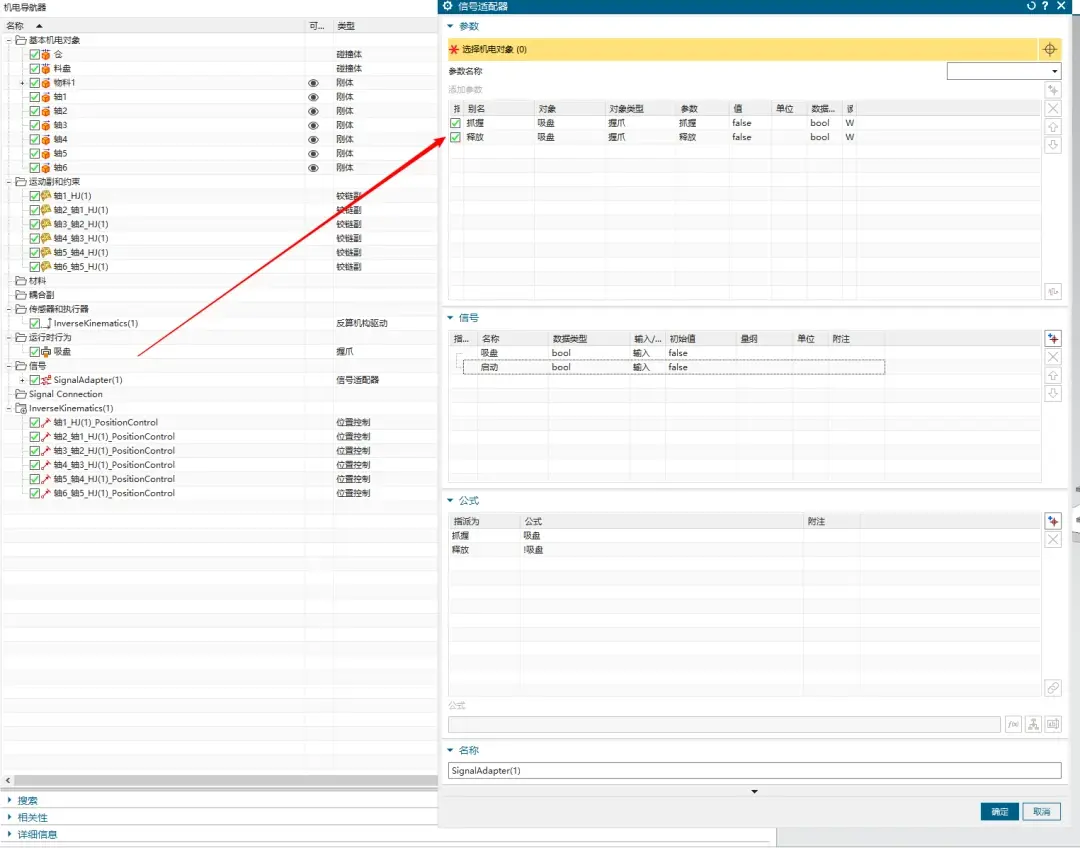
图1-17配置信号适配器
11、配置仿真序列控制如图1-18所示为该动作的第一条仿真序列添加一个启动条件,条件为当启动信号为TRUE时。
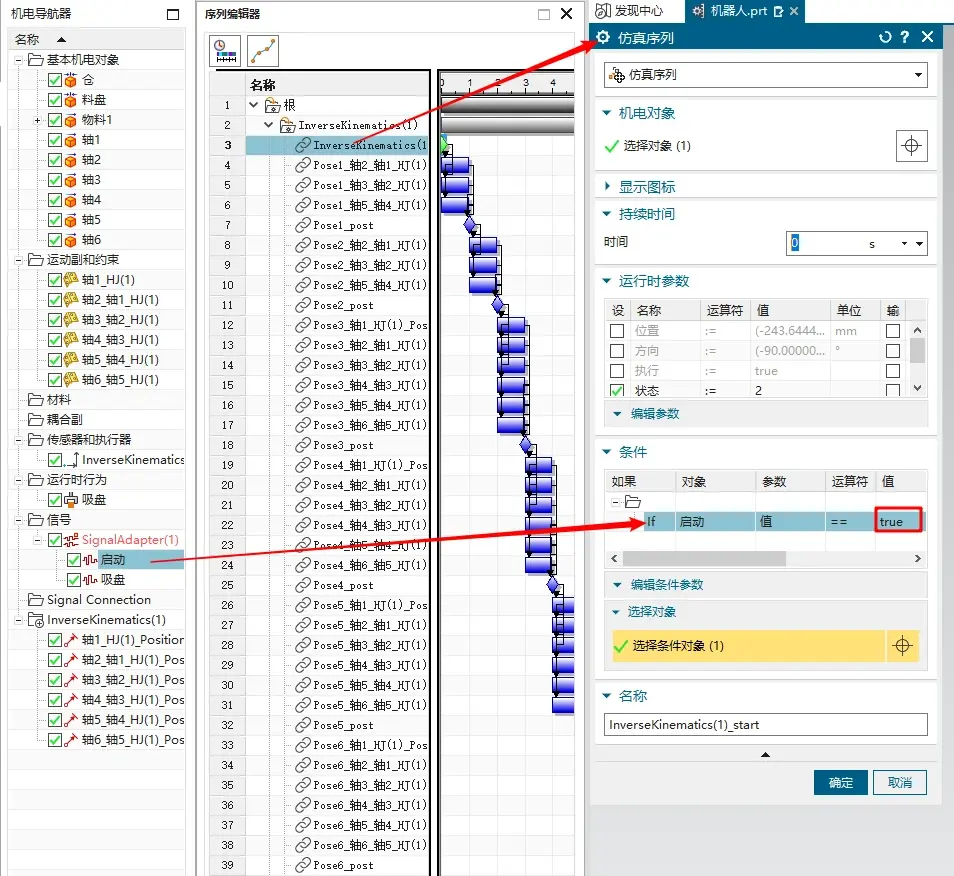
图1-18配置信号适配器
12、配置仿真序列控制如图1-19所示为该动作的pose4的结束序列添加一个对吸盘信号的控制,将值设为true持续时间为1。
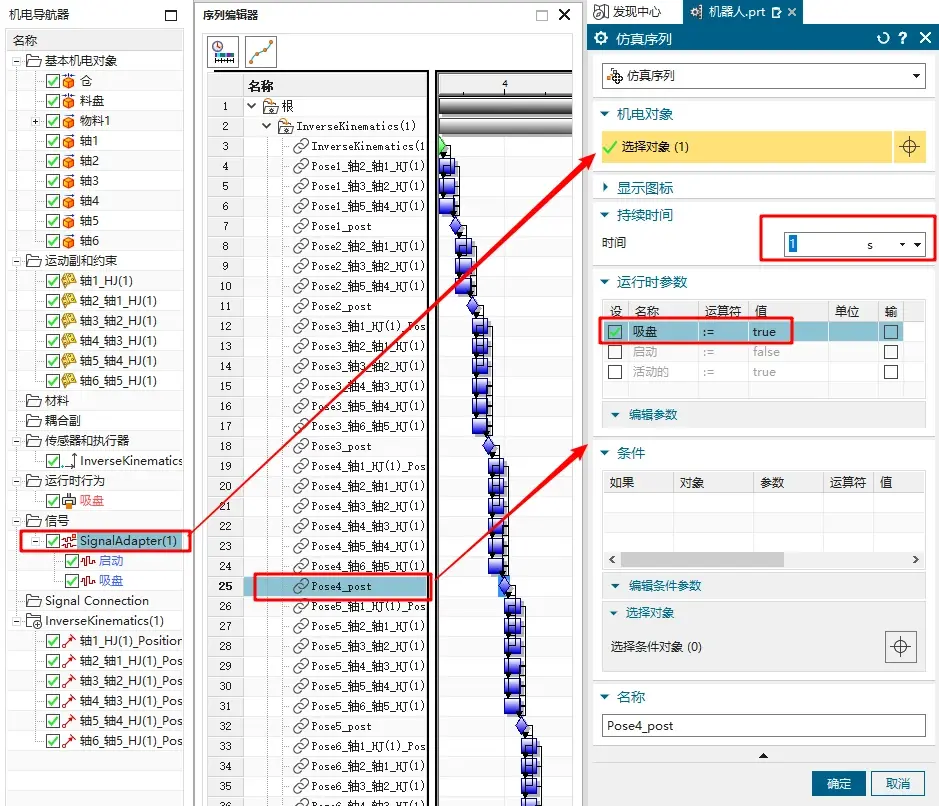
图1-19吸盘动作的启动
13、配置仿真序列控制如图1-20所示为该动作的pose9的结束序列添加一个对吸盘信号的控制,将值设为false持续时间为1。
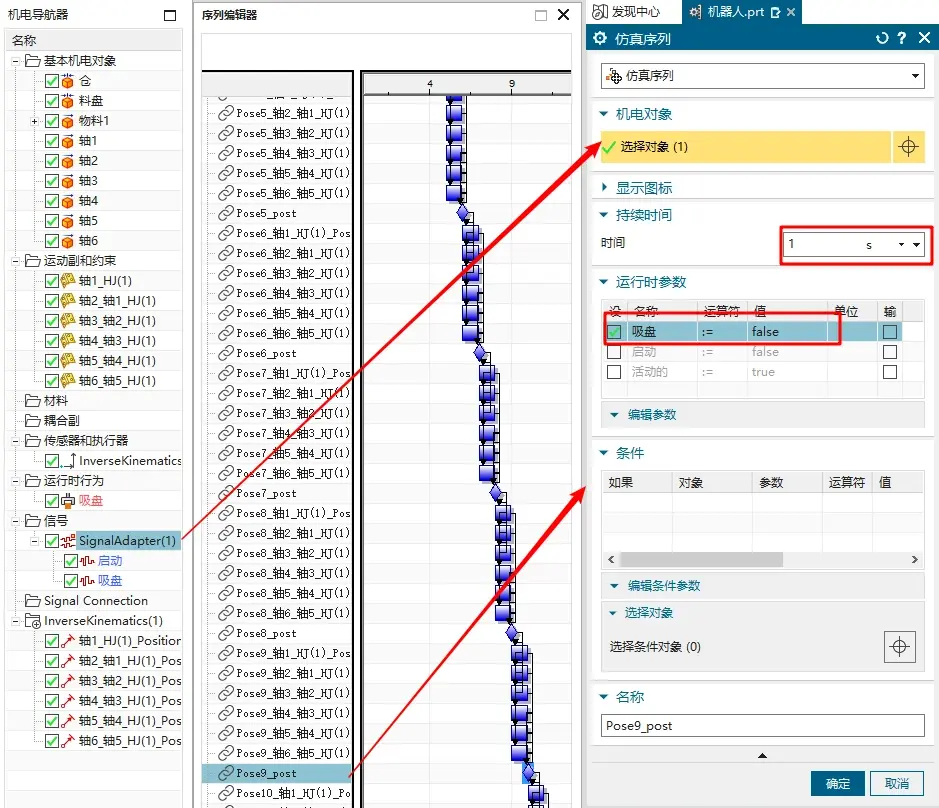
图1-20吸盘动作的关闭
14、福利
资料分享
本章节所需学习资料下载
模型资料:关注“高谱公众号”,回复“231027”即可下载。

武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















