















































软件

产品


1.1 SPI总线介绍
SPI全称Serial Peripheral Interface,即串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。SPI接口主要应用在EEPROM、FLASH、实时时钟、AD转换器,还有数字信号处理器和数字信号解码器之间。SPI是一种高速的、全双工、同步通讯总线,在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局节省空间提供了方便,正是这种简单易用的特性,如今越来越多的芯片集成了这种通讯协议。下图是SPI内部结构简易图
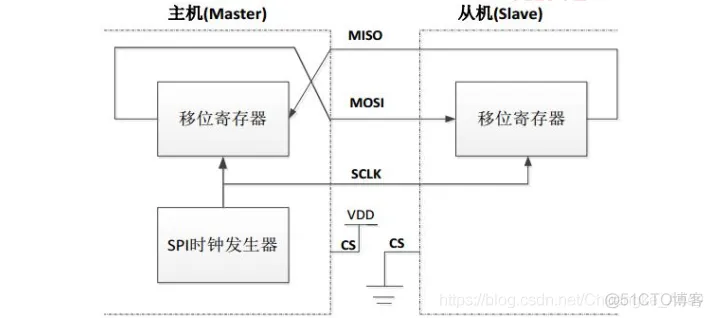
从上图可以看出,主设备和从设备都有一个串行移位寄存器,主设备通过向它的SPI串行寄存器写入一个字节来发起一次传输,寄存器通过MOSI信号线将字节传送给从设备,从设备也将自已的移位寄存器中的内容通过MISO信号线返回给主设备。这样两个移位寄存器中的内容就被交换。外设的写操作和读操作时同步完成的,如果只进行写操作,主设备只需要忽略接收到的字节,如果主设备要进行读操作,就必须发送一个空字节来引发从设备的传输。
SPI接口一般使用4条线通讯,单向传输时也可以使用3条线,其中3条线为SPI总线(MISO/MOSI/SCLK),1条为SPI片选信号线(CS),它们的作用如下:
MISO:主设备数据输入,从设备数据输出 MOSI:主设备数据输出,从设备数据输入 SCLK:时钟信号,由主设备产生 CS:从设备片选信号,由主设备控制
SPI使用MOSI/MISO信号线来传输数据,使用SCLK信号线进行数据同步。MOSI/MISO数据线在SCLK的每个时钟周期传输1位数据,且数据输入输出是同时进行的。数据传输时,MSB先行或LSB先行没有硬性规定,但是两个SPI通讯设备之间必须使用同样的协定,一般都会采用MSB先行模式。
当有多个SPI从设备与SPI主设备相连时,设备的MOSI/MISO/SCLK信号线并联到相同的SPI总线上,即无论有多少个从设备,都共同使用者3条总线;而每个从设备都有独立的1条CS信号线,该信号线独占主设备的一个引脚,即有多少个从设备就有多少条片选信号线。当主设备要选择从设备时,把该从设备的CS信号线设置为低电平,该从设备即被选中(片选有效),接着主设备开始与从设备进行SPI通讯。
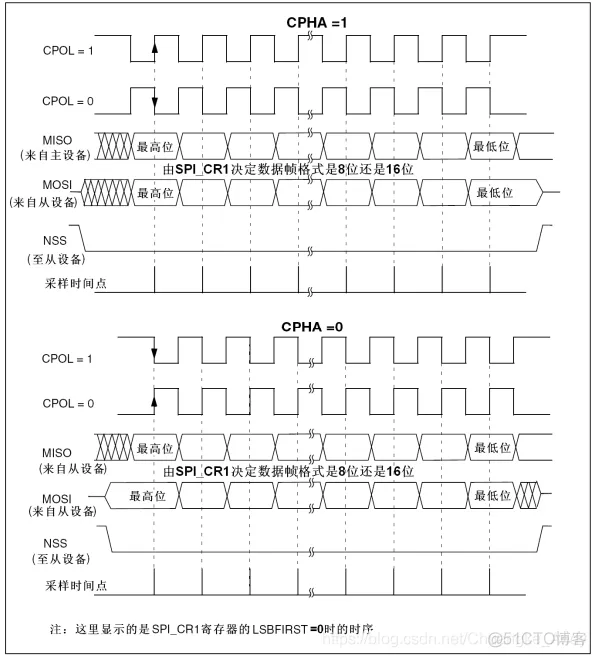
SPI总线根据时钟极性(CPOL)和时钟相位(CPHA)的配置不同,可以有四种工作方式:
CPOL=0:串行同步时钟的空闲状态为低电平 CPOL=1:串行同步时钟的空闲状态为高电平 CPHA=0:在串行同步时钟的第一个跳变沿(上升或下降)数据被采样 CPHA=1:在串行同步时钟的第二个跳变沿(上升或下降)数据被采样
1.2 W25QXX芯片介绍
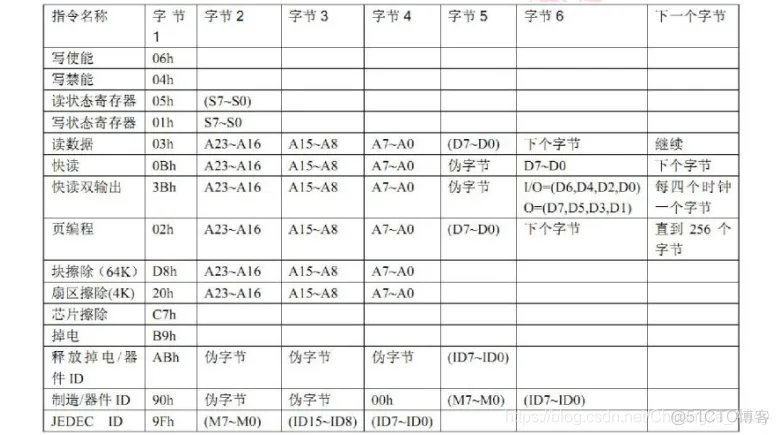
W25QXX芯片是华邦公司推出的大容量SPI FLASH产品,该系列有W25Q16/32/62/128等。本例程使用W25Q64,W25Q64容量为64Mbits(8M字节):8MB的容量分为128个块(Block)(块大小为64KB),每个块又分为16个扇区(Sector)(扇区大小为4KB);W25Q64的最小擦除单位为一个扇区即4KB,因此在选择芯片的时候必须要有4K以上的SRAM(可以开辟4K的缓冲区)。W25Q64的擦写周期多达10万次,具有20年的数据保存期限。
下表是W25QXX的常用命令表
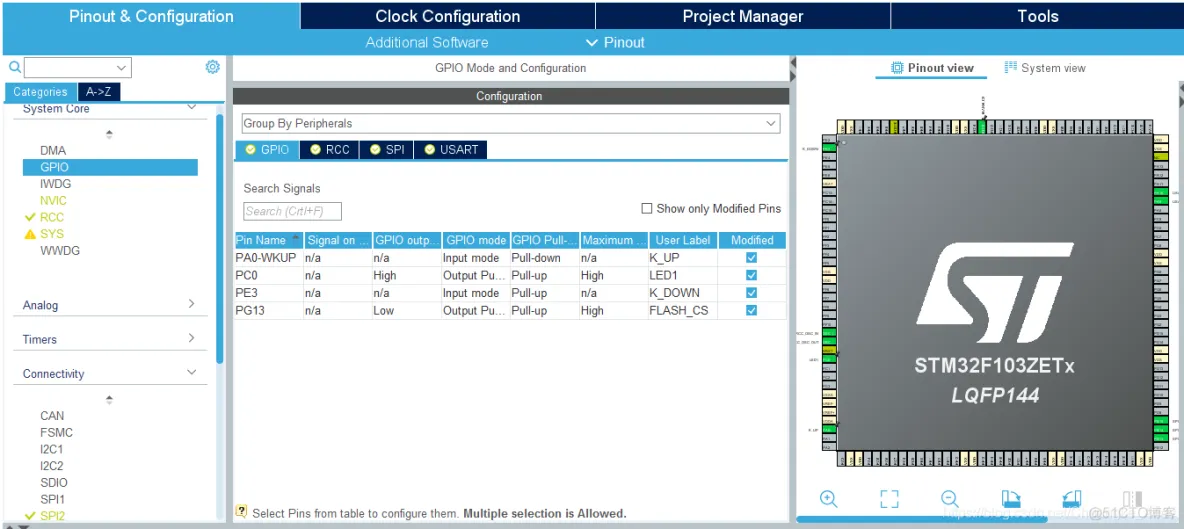
D1指示灯用来提示系统运行状态,K_UP按键用来控制W25Q64数据写入,K_DOWN按键用来控制W25Q64数据读取,串口1用来打印写入和读取的数据信息
D1指示灯 K_UP和K_DOWN按键 USART1 SPI W25Q64
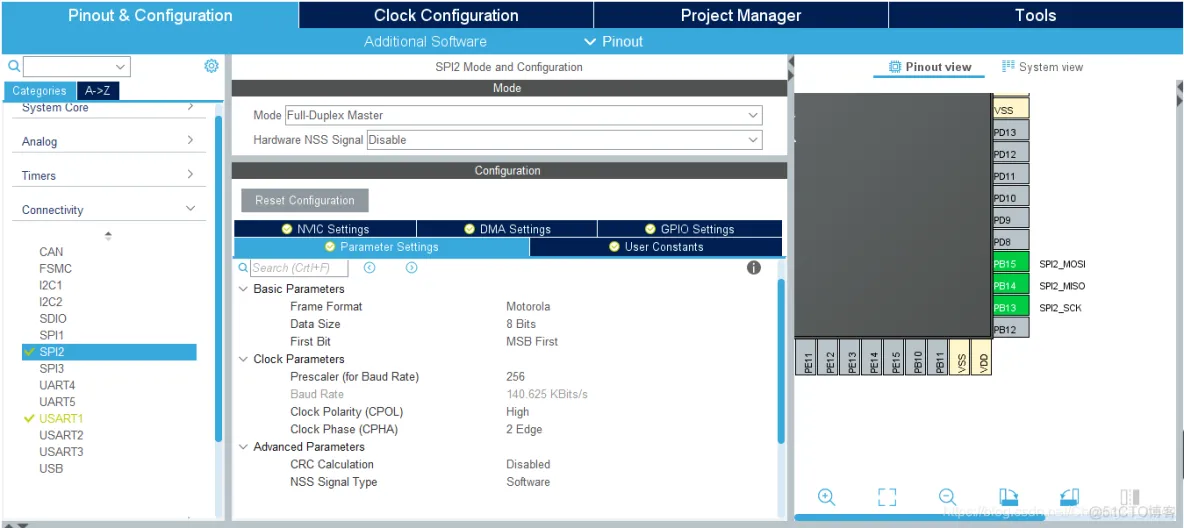
3.1 STM32CubeMX设置
3.2 MDK-ARM编程
void MX_SPI2_Init(void){
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER; //设置为主模式
hspi2.Init.Direction = SPI_DIRECTION_2LINES; //双线模式
hspi2.Init.DataSize = SPI_DATASIZE_8BIT; // 8位数据长度
hspi2.Init.CLKPolarity = SPI_POLARITY_HIGH; //串行同步时钟空闲状态为高电平
hspi2.Init.CLKPhase = SPI_PHASE_2EDGE; //第二个跳变沿采样
hspi2.Init.NSS = SPI_NSS_SOFT; //NSS软件控制
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256; //分配因子256
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB; //MSB先行
hspi2.Init.TIMode = SPI_TIMODE_DISABLE; //关闭TI模式
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; //关闭硬件CRC校验
hspi2.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi2) != HAL_OK){
Error_Handler();
}
}
void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle){
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(spiHandle->Instance==SPI2){
__HAL_RCC_SPI2_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
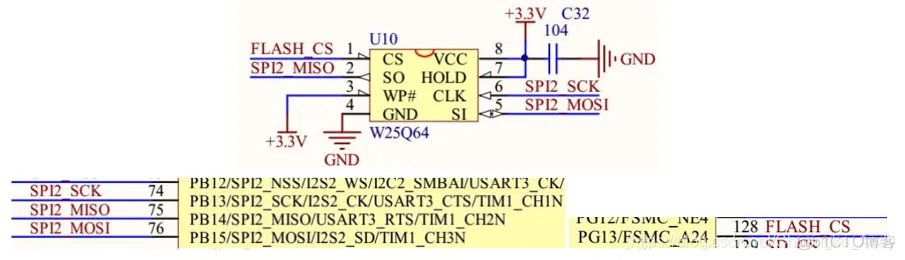
/**SPI2 GPIO Configuration
PB13 ------> SPI2_SCK
PB14 ------> SPI2_MISO
PB15 ------> SPI2_MOSI */
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_14;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
}
//这里仅介绍几个重要的函数
void W25QXX_Init(void){
W25Qx_Disable();
W25QXX_TYPE = W25QXX_ReadID(); //读取芯片ID
printf("FLASH ID:%X\r\n",W25QXX_TYPE);
if(W25QXX_TYPE == 0xc816)
printf("FLASH TYPE:W25Q64\r\n");
}
uint16_t W25QXX_ReadID(void){
uint16_t ID;
uint8_t id[2]={0};
uint8_t cmd[4] = {W25X_ManufactDeviceID,0x00,0x00,0x00}; //读取ID命令
W25Qx_Enable(); //使能器件
HAL_SPI_Transmit(&hspi2,cmd,4,1000);
HAL_SPI_Receive(&hspi2,id,2,1000);
W25Qx_Disable(); //取消片选
ID = (((uint16_t)id[0])<<8)|id[1];
return ID;
}
void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead){
uint8_t cmd[4] = {0};
cmd[0] = W25X_ReadData; //读取命令
cmd[1] = ((uint8_t)(ReadAddr>>16));
cmd[2] = ((uint8_t)(ReadAddr>>8));
cmd[3] = ((uint8_t)ReadAddr);
W25Qx_Enable(); //使能器件
HAL_SPI_Transmit(&hspi2,cmd,4,1000);
HAL_SPI_Receive(&hspi2,pBuffer,NumByteToRead,1000);
W25Qx_Disable(); //取消片选
}
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite){
uint32_t secpos;
uint16_t secoff;
uint16_t secremain;
uint16_t i;
uint8_t *W25QXX_BUF;
W25QXX_BUF = W25QXX_BUFFER;
secpos = WriteAddr/4096; //扇区地址
secpos = WriteAddr%4096; //在扇区里的偏移
secremain = 4096-secoff; //扇区剩余空间大小
printf("WriteAddr:0x%X,NumByteToWrite:%d\r\n",WriteAddr,NumByteToWrite);
if(NumByteToWrite <= secremain) //不大于4K字节
secremain = NumByteToWrite;
while(1){
W25QXX_Read(W25QXX_BUF,secpos*4096,4096); //读取整个扇区内容
for(i=0;i<secremain;i++){ //校验数据
if(W25QXX_BUF[secoff+i] != 0xff) //需要擦除
break;
}
if(i < secremain){ //需要擦除
W25QXX_Erase_Sector(secpos); //擦除扇区
for(i=0;i<secremain;i++){
W25QXX_BUF[i+secoff] = pBuffer[i];
}
W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096); //写入整个扇区
}
else{
W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain); //写入扇区剩余空间
}
if(NumByteToWrite == secremain){ //写入结束了
break;
}
else{ //写入未结束
secpos++; //扇区地址增1
secoff = 0; //偏移位置为0
pBuffer += secremain; //指针偏移
WriteAddr += secremain; //写地址偏移
NumByteToWrite -= secremain; //字节数递减
if(NumByteToWrite > 4096)
secremain = 4096; //下个扇区还没是写不完
else
secremain = NumByteToWrite; //下个扇区可以写完了
}
}
}
/* USER CODE BEGIN PV */
uint8_t wData[0x100];
uint8_t rData[0x100];
uint32_t i;
/* USER CODE END PV */
void SystemClock_Config(void);
int main(void){
/* USER CODE BEGIN 1 */
uint8_t key;
/* USER CODE END 1 */
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_SPI2_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
W25QXX_Init();
for(i=0;i<0x100;i++){
wData[i] = i;
rData[i] = 0;
}
/* USER CODE END 2 */
while (1){
key = KEY_Scan(0);
if(key == KEY_UP_PRES){
printf("KEY_UP_PRES write data...\r\n");
W25QXX_Erase_Sector(0);
W25QXX_Write(wData,0,256);
}
if(key == KEY_DOWN_PRES){
printf("KEY_DOWN_PRES read data...\r\n");
W25QXX_Read(rData,0,256);
for(i=0;i<256;i++){
printf("0x%02X ",rData[i]);
}
}
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_0);
HAL_Delay(200);
}
}
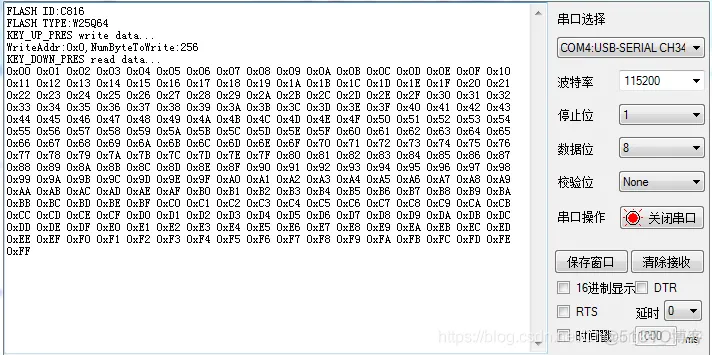
编译无误下载到开发板后,可以看到D1指示灯不断闪烁,当按下K_UP按键后数据写入到W25Q64芯片内,当按下K_DOWN按键后读取W25Q64芯片的值,同时串口打印出相应信息
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















