















































软件

产品




clear all;clc; close all;% 前视线阵%% 参数C=3e8;fc=10e9;lambda=C/fc;v=100;
Tp=1.5e-6;N=60; %阵元个数B=100e6;Fs=120e6;gama=B/Tp;Da=0.2;H=600;PRF=1000;
%阵元切换速度phi=45/180*pi; %俯视角theta=24/180*pi; %波束宽度d=0.3;% 阵元间距va=d*PRF;
%方位速度nrn=200;nan=N;Rs=H*sqrt(2);%% point targets% point=[600 0 0; 650 0 0; 600 50 0 ;
600 -50 0; 550 0 0 ];point=[600 0 0];point_num=size(point,1);%% La=N*(Da+d);ta=[-N/2:N/2-1]/PRF;
Tstart=2*Rs/C-nrn/2/Fs; %起始时刻Tend=2*Rs/C+(nrn/2-1)/Fs; %终止时刻tr=[Tstart:1/Fs:Tend].';
%快时间 %%x_pos=ta.*v;y_pos=ta.*va;z_pos=H;R0=sqrt(z_pos^2+(600-v.*ta).^2);Rr=sqrt(R0.^2+(va.*ta).^2);
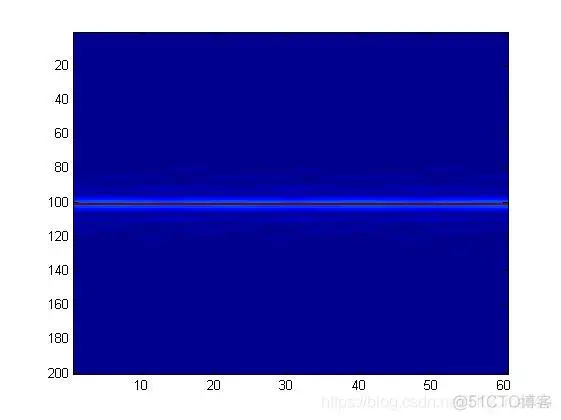
%% echox=zeros(nrn,nan,'single');for m=1:N temp1=zeros(nrn,1); for num=1:point_num
x_temp=abs(x_pos(m)-point(num,1)); y_temp=y_pos(m)-point(num,2); z_temp=z_pos-point(num,3);
Rt=sqrt(x_temp^2+y_temp^2+z_temp^2); alpha=atan(y_temp./sqrt(x_temp.^2+z_temp.^2));
if (alpha>=-theta/2 && alpha<=theta/2) Rt=sqrt(x_temp^2+y_temp^2+z_temp^2);
Wr=abs(tr-2*Rt/C)<=Tp/2; temp2=Wr.*exp(j*pi*gama*(tr-2*Rt/C).^2).*exp(-j*4*pi*Rt/lambda);
temp1=temp1+temp2; end end x(:,m)=temp1;endfigure;imagesc(abs(x)); ka=(-2/lambda).*(va^2./R0);
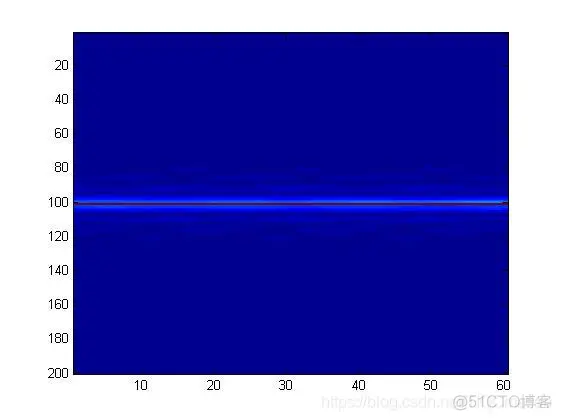
%方位调频率fr=[-nrn/2:nrn/2-1]'/nrn*Fs;del_ran=Rr-Rs;%% range compressfr=[-nrn/2:nrn/2-1]'/nrn*Fs;
% length=(fr/abs(gama)/Tp);Hp=exp(j*pi*(2*v/lambda+(fr.^2)/gama));%%x=fftshift(fft(fftshift(x)));
for m=1:N temp2=exp(j*4*pi*del_ran(m)/C*fr); temp1=x(:,m).*Hp.*temp2;
x(:,m)=fftshift(fft(fftshift(temp1)));endfigure;imagesc(abs(x));%%for n=1:nrn
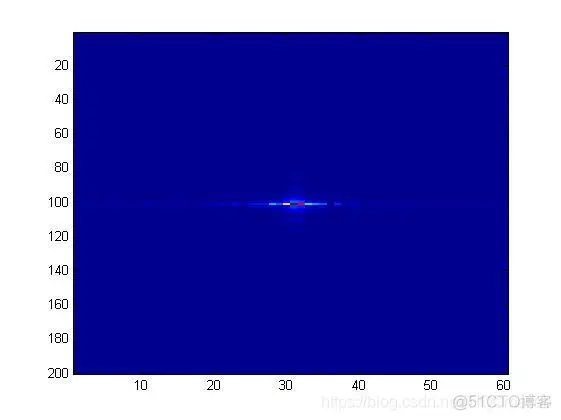
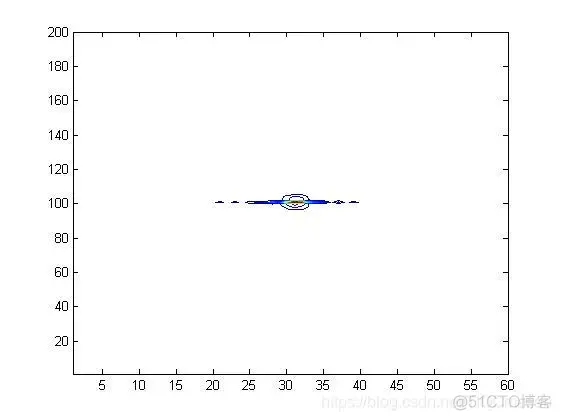
xa(n,:)=fftshift(fft(fftshift(x(n,:)))); enddelta_R=((va.*ta).^2)./(2*R0);Curve=delta_R*2*Fs/C;
delta_RMC=Curve-floor(Curve);%小数部分% sincP=4;temp=zeros(nrn,nan);for n=1:nan for m=P:nrn
for i=-P/2:P/2 if m+Curve(n)+i>nrn temp(m,n)=temp(m,n)+xa(nrn,n)*sinc((-i+Curve(n)));
else temp(m,n)=temp(m,n)+xa(m+floor(Curve(n))+i,n)*sinc((-i+delta_RMC(n)));
end end endend1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.21.22.23.24.25.26.27.28.29.30.31
.32.33.34.35.36.37.38.39.40.41.42.43.44.45.46.47.48.49.50.51.52.53.54.55.56.57.58.59.60.61.62.63.64.65.66.67
.68.69.70.71.72.73.74.75.76.77.78.79.80.81.82.83.84.85.86.87.88.89.90.91.92.93.94.95.
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















