















































软件

产品


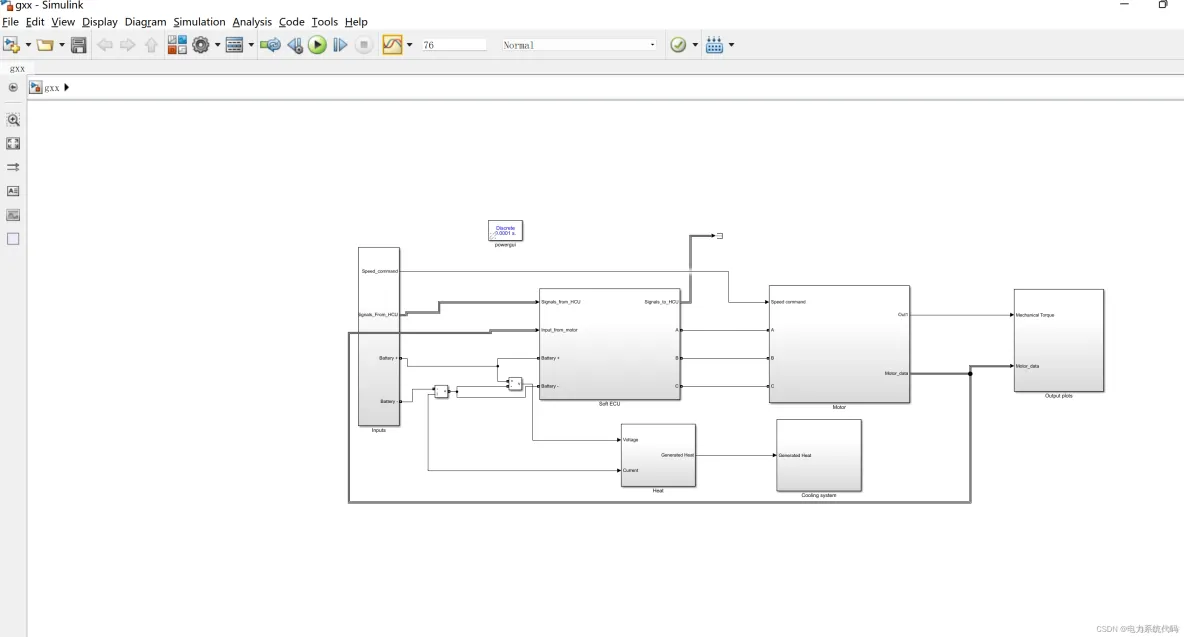
本文旨在模拟永磁同步电机的性能,该电机使用 Rinehart 运动系统-交流电机控制器进行控制。首先收集有关电机和控制器的所有可用数据,这将有助于为建模中的各种变量提供值。本文使用 Pragasen Pillay 和 Ramu Krishnan 撰写的关于“永磁电机驱动器的建模、仿真和分析”的研究论文来了解 PMSM 的建模并验证用于建模 PMSM 和矢量控制的现有 Simscape 模块。由于时间限制,冷却系统的建模被简化为基本的对流传热模型,使用以前工程课程的理解并参考 R.K. 的传热和传质一书。动态电机模型和热模型使用可用的实验数据通过参数估计进行了微调。
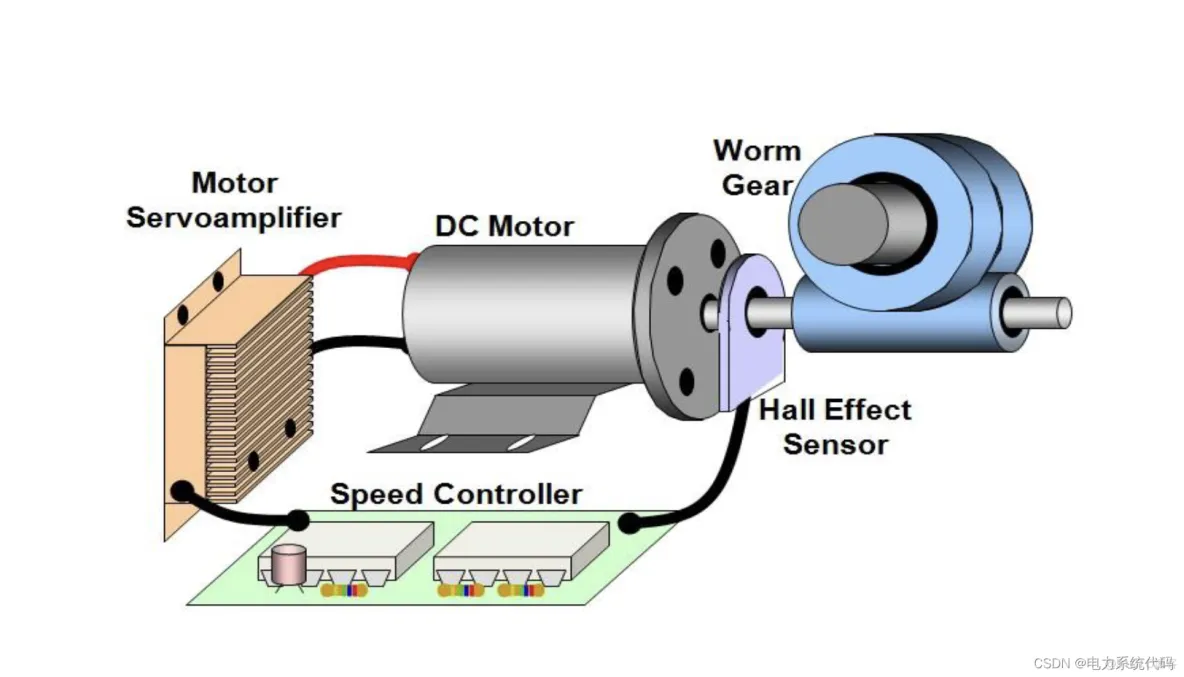
PM100DZ 电机控制器 电机控制器将来自车辆储能系统的直流电转换为电机所需的三相交流电。 PM100DZ 采用矢量控制技术来控制电机的转矩输出.
PMSM 和 SM 分别具有相似的定子和绕线转子,PMSM 转子中的感应电流可以忽略不计,并且都产生相似的反电动势。因此,PMSM 的数学模型类似于绕线转子的数学模型。因此,PMSM 的 d-q 方程为:
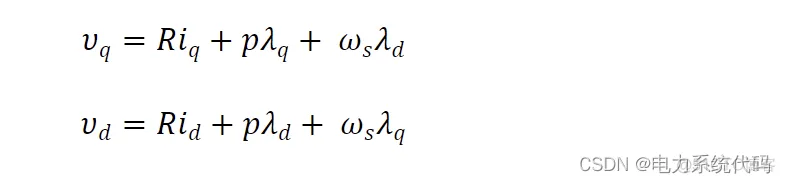
其中

νd 和 νq 是 q 和 d 轴电压,iq 和 id 是 q 和 d 轴定子电流,id 和 iq 是 d,q 轴定子电流,Ld 和 Lq,是 d,q 轴电感,λd 和 λq,是d、q 轴定子磁链,而 R 和 ωs 分别是定子电阻和逆变器频率。 λaf 是由于连接定子的转子磁体而产生的磁链。电动扭矩为:

运动动力学方程为:

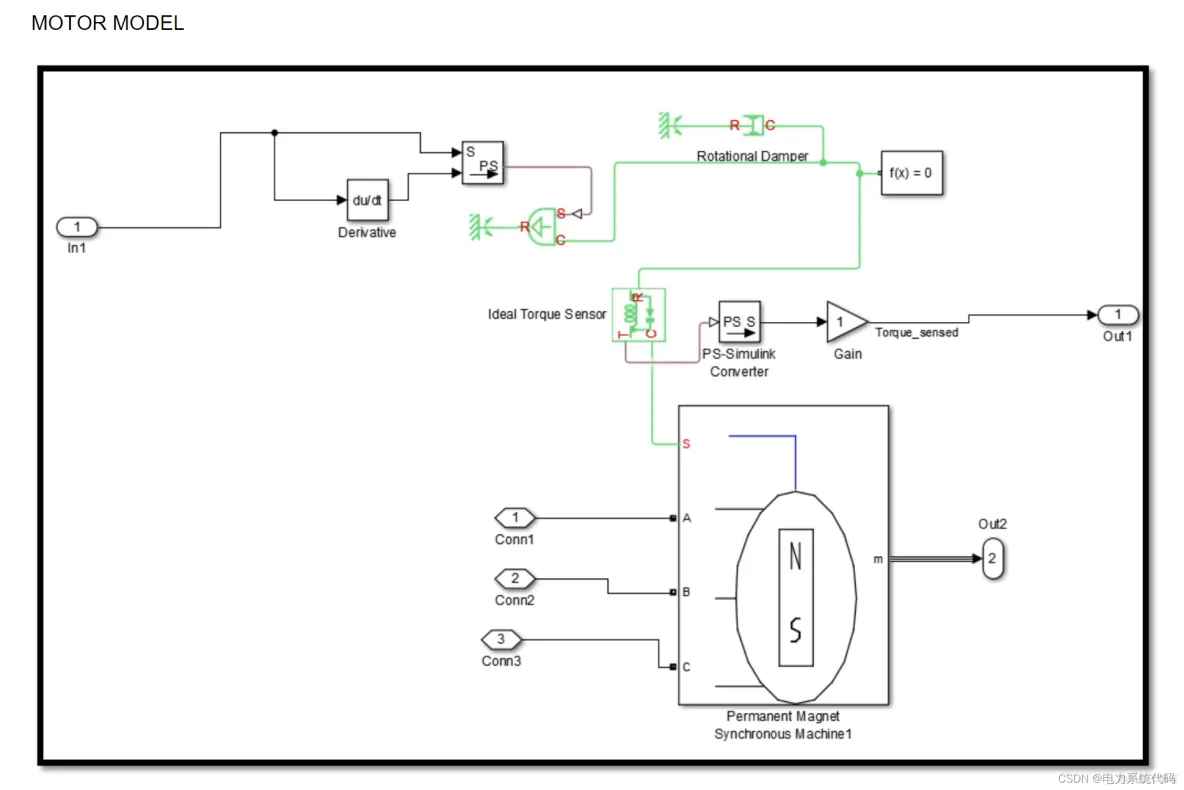
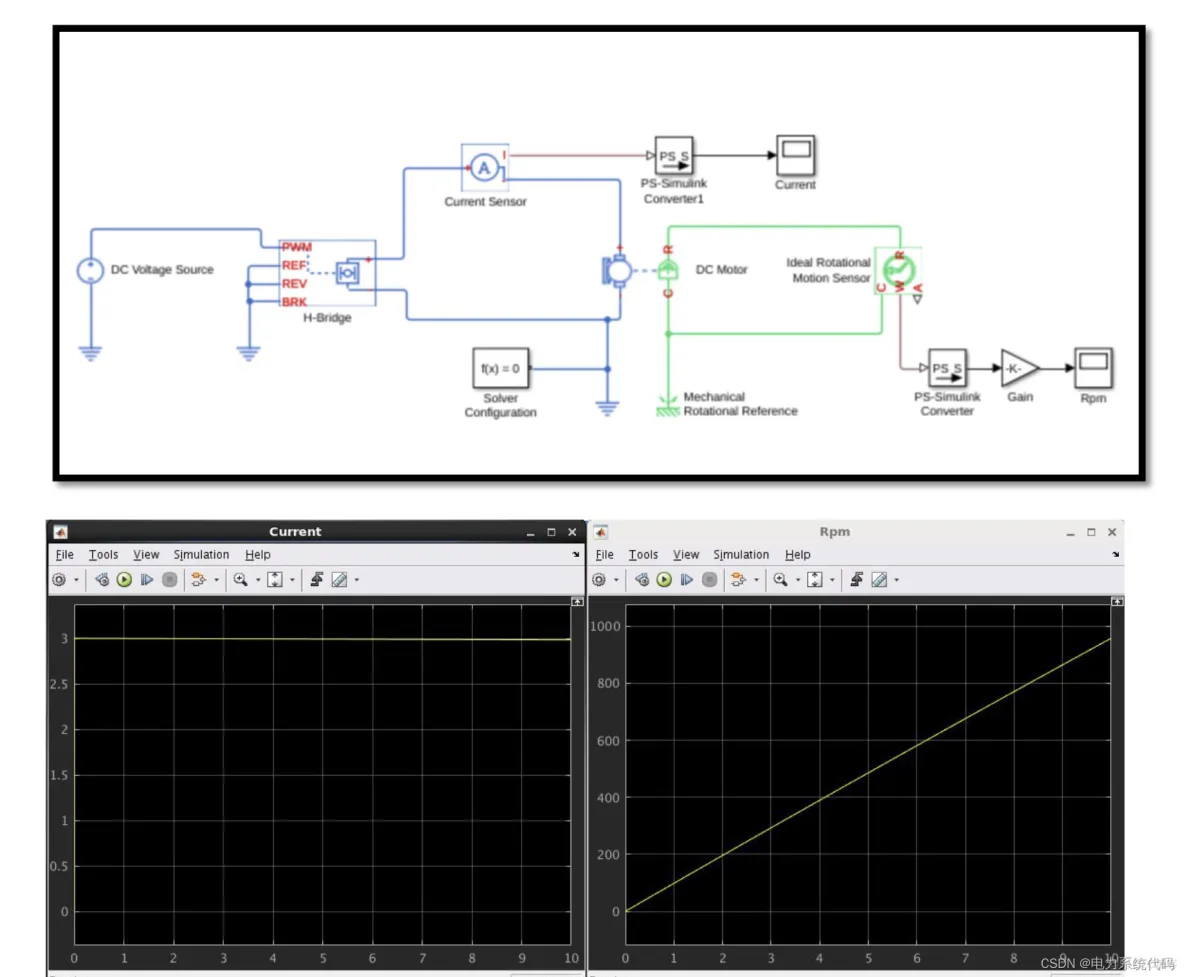
P为极对数,TL为负载转矩,B为阻尼系数,ωr为转子转速,J为转动惯量。 SIMSCAPE 建模 – Simscape 带有 PMSM 机器的通用模型,这里有一些关于 Simscape PMSM 模块的细节:

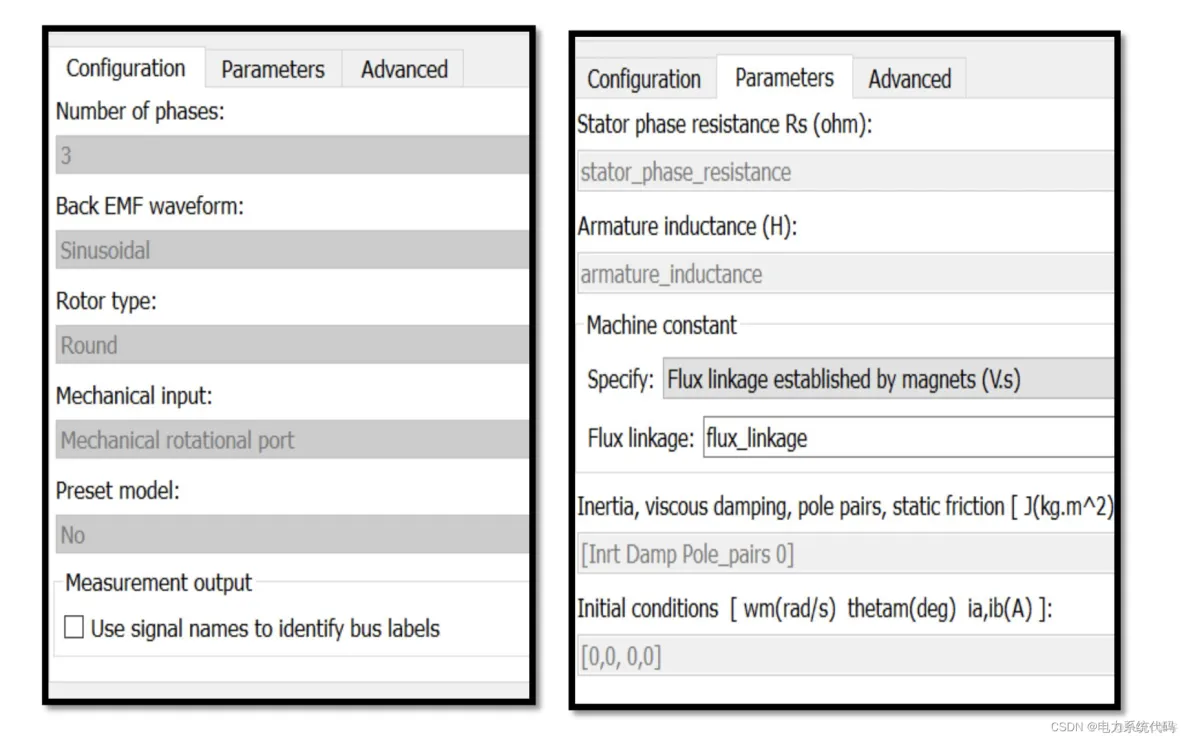
永磁同步机模块在发电机或电动机模式下运行。操作模式由机械扭矩的符号决定(电机模式为正,发电机模式为负)。由于 Pragasen Pillay 和 Ramu Krishnan 假设我们将采用该选项,因此该模块可以选择正弦或梯形通量。驱动这个模块的方程是:


这里,Lq、Ld 是 q 和 d 轴电感,R 是定子绕组的电阻。iq、id 是 q 和 d 轴电流。 vq, vd 是 q 和 d 轴电压。 ωm 是转子的角速度。 λ 是转子永磁体在定子相中感应的磁通量的幅度。 p 是极对数,Te 是电磁转矩和动态电机方程:
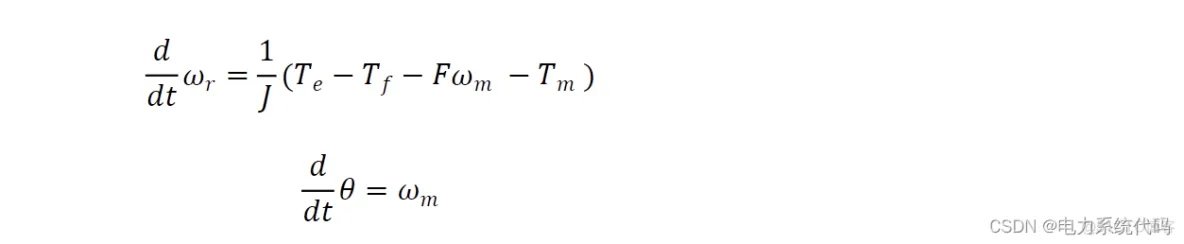
其中 J 是结合惯量和转子负载,F 是粘性摩擦,θ 是转子角位置 ωm 是转子的角速度,Tm 是轴机械扭矩,Tf 是轴静摩擦扭矩 比较两个模型我们可以看到核心概念研究论文中的模型和 simscape 中的模型是相同的,尽管论文中引用的假设更多,因此我们得出结论,我们可以使用 PMSM 模块,我们可以通过忽略一些变量来使用更简单的版本。
矢量控制通常用于交流电机,以在性能方面将它们转换为具有非常理想的控制特性的等效他励直流电机。维基百科将矢量控制解释为“一种变频驱动 (VFD) 控制方法,其中三相交流电动机的定子电流被识别为两个正交分量,可以用矢量进行可视化。一个分量定义电机的磁通量,另一个分量定义转矩。驱动器的控制系统根据驱动器速度控制给出的磁通和转矩参考值计算相应的电流分量参考值。”。转子磁链以转子速度 ωr 旋转,并通过转子角位置远离固定参考,如图 1 矢量控制的相图所示 :
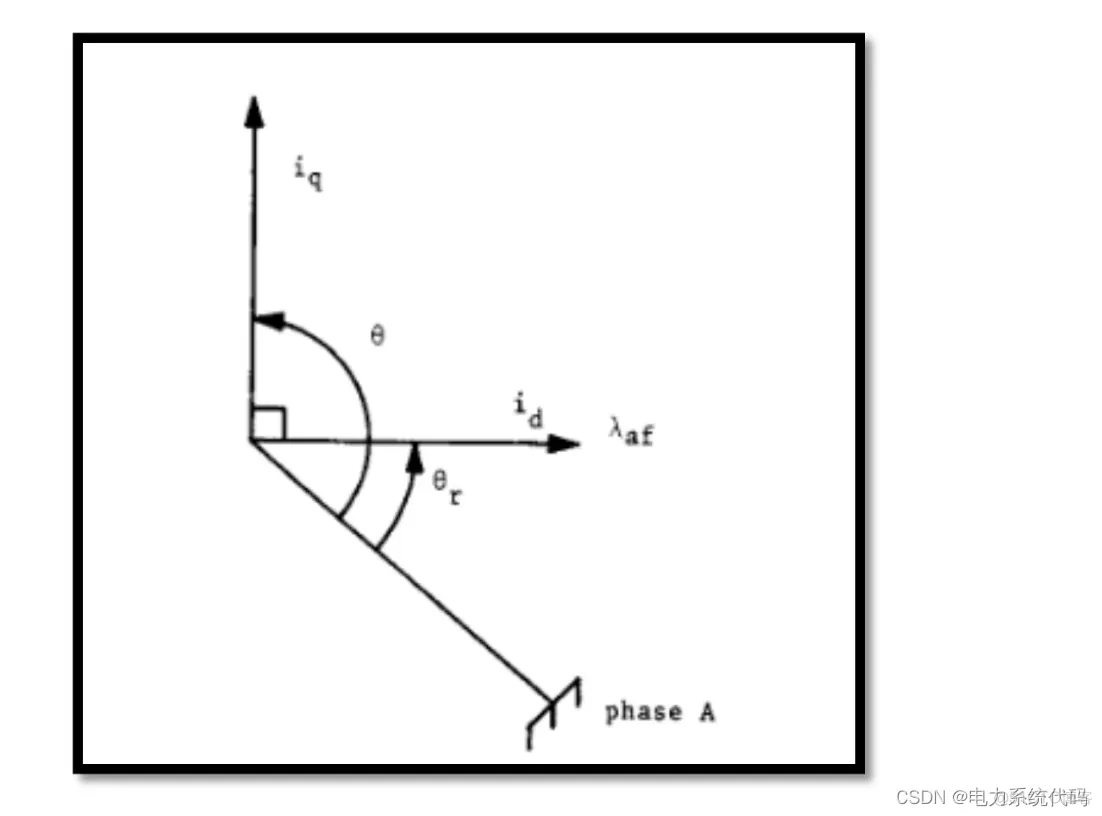
图1 矢量控制相图
其中t是时间。如果id强制为零,则:

由于磁通量是常数,因此转矩与 q 轴电流成正比。这表示为:

其中:
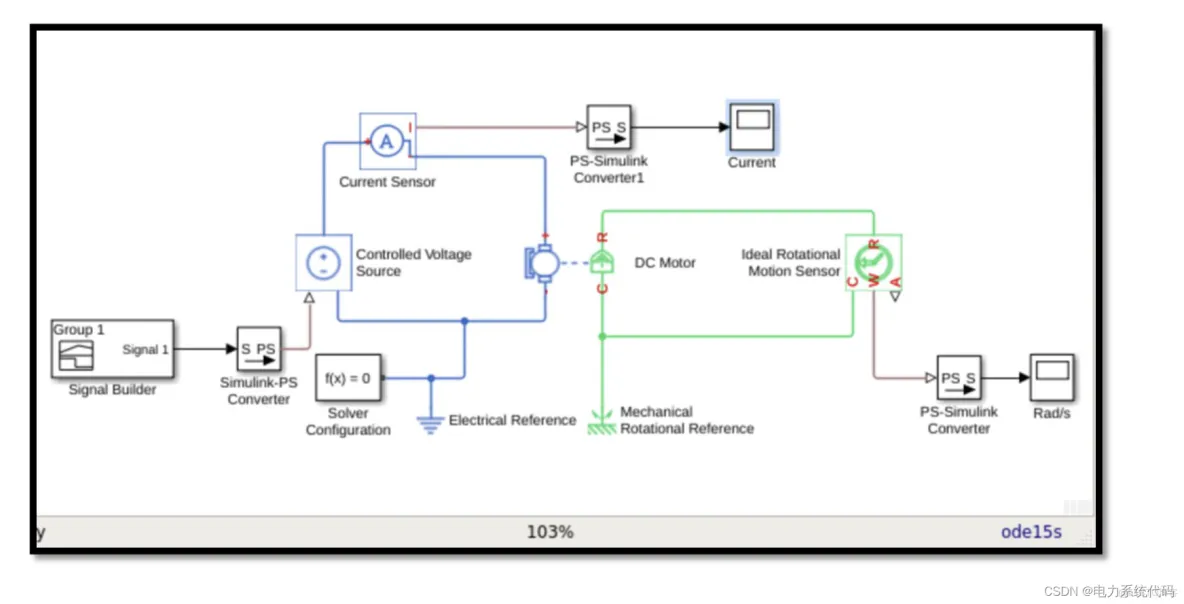
转矩方程类似于他励直流电机的转矩方程。 SIMSCAPE 模型- Simscape 有一个矢量控制 PMSM 模块,如下所示。
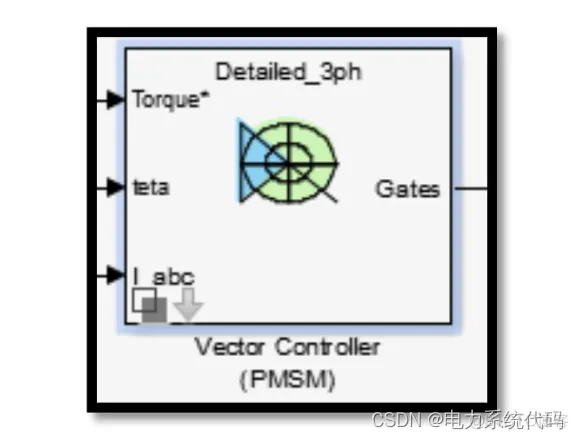
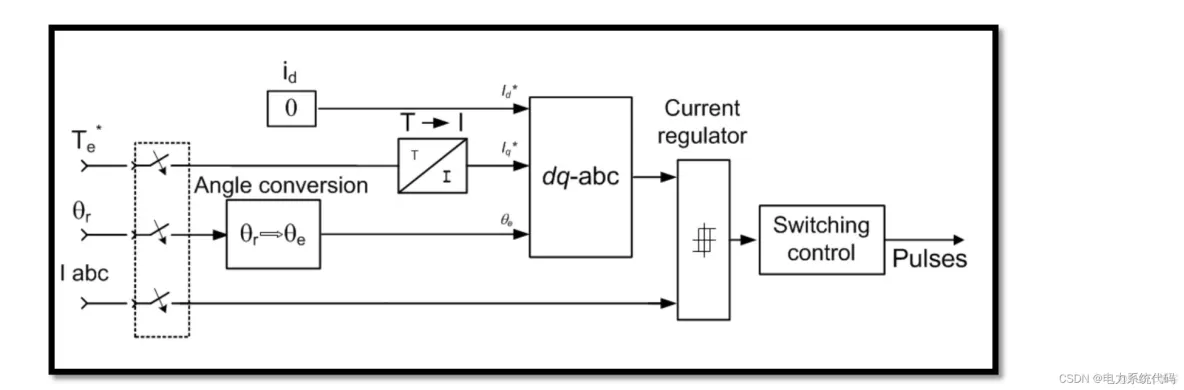
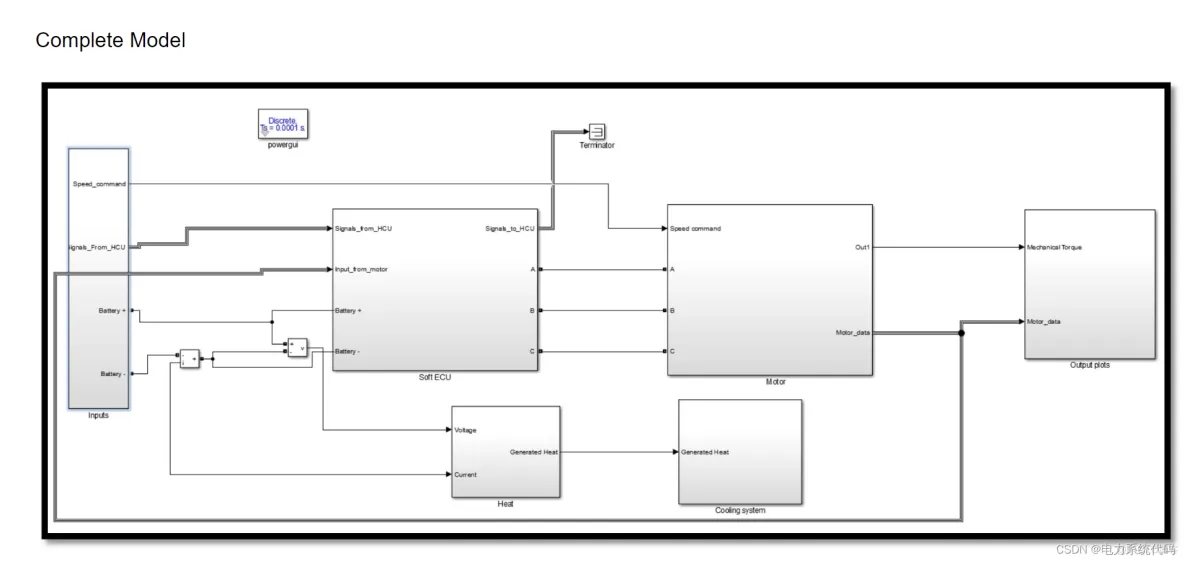
此模块使用 PMSM 的矢量控制逻辑,我们将使用它来模拟我们的完整动态
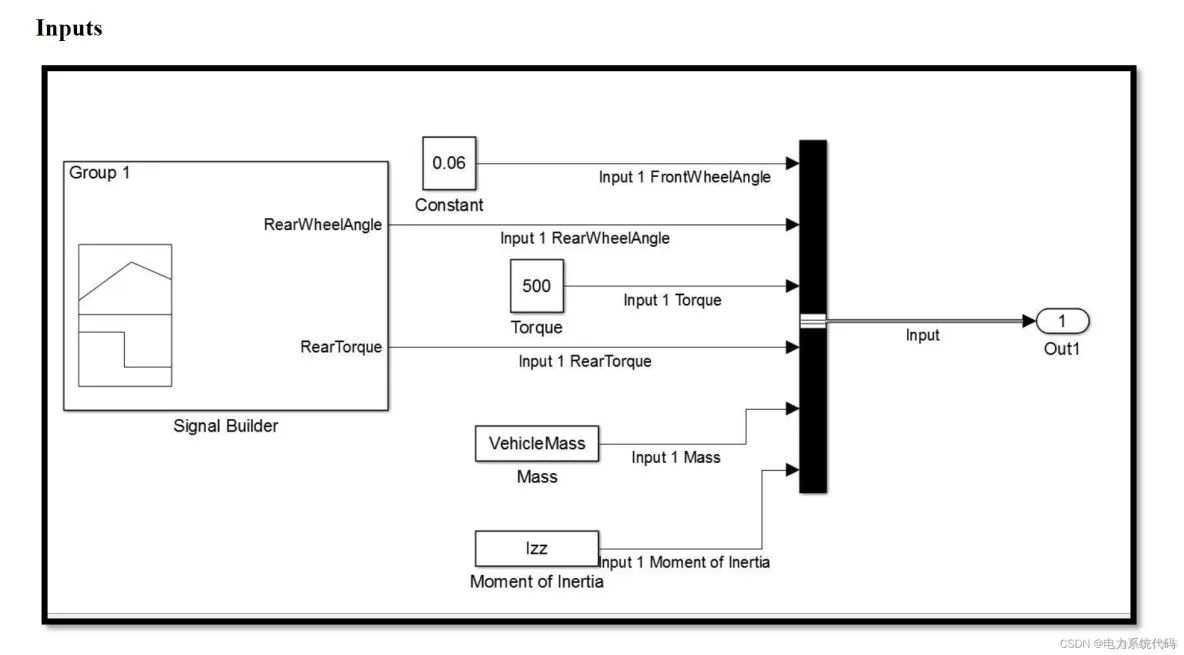
由于用于电机建模的许多变量是未知的,我们将为这些参数创建单值变量,以便我们可以将它们用于参数估计。不需要分步建模指南,因为 Simscape 中存在大多数模块,了解功能和参数估计是重点。矢量控制模型:
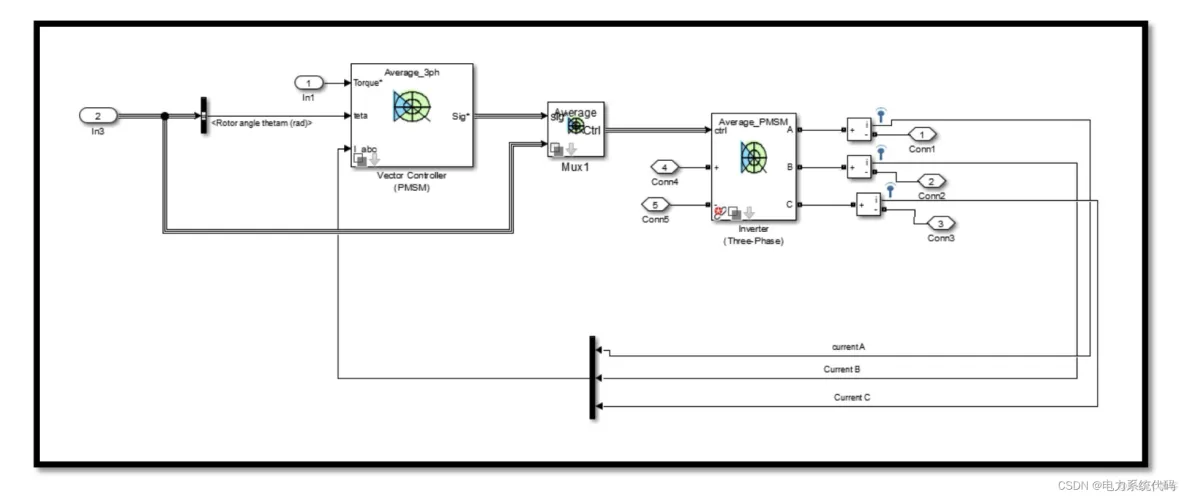
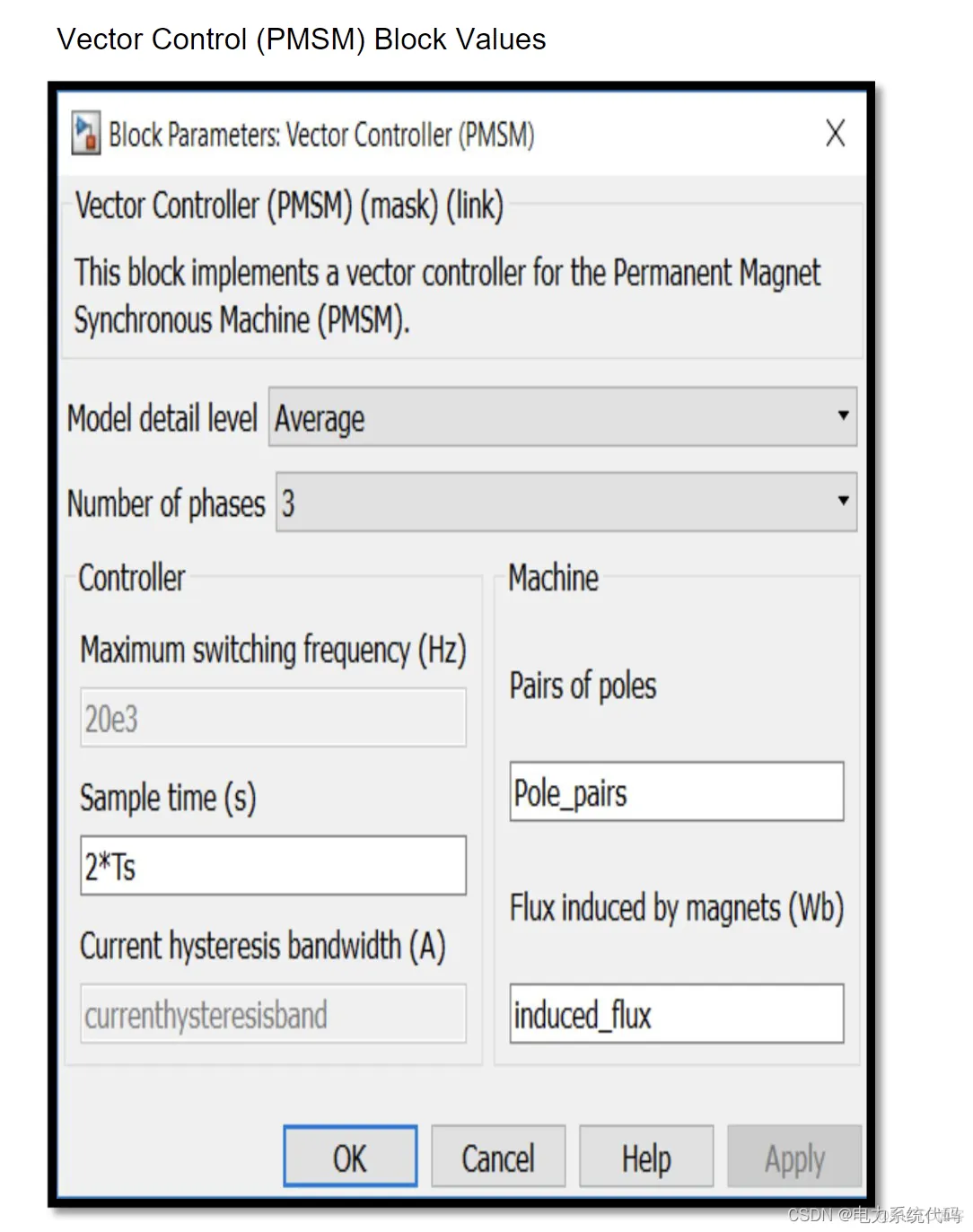
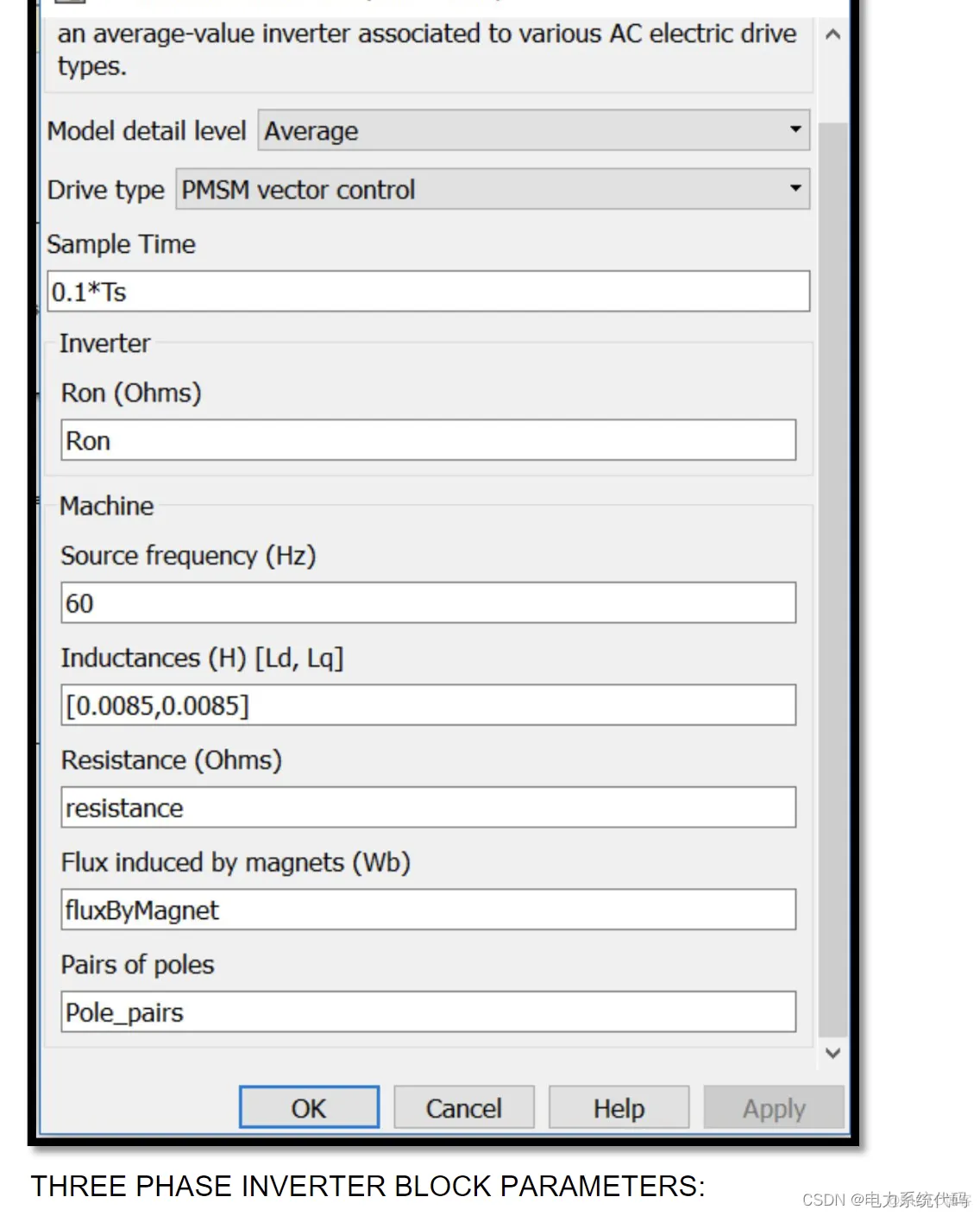
上面显示的模块很容易出现在 Simulink 中,您只需要了解模块的功能,这将有助于创建正确的电路。
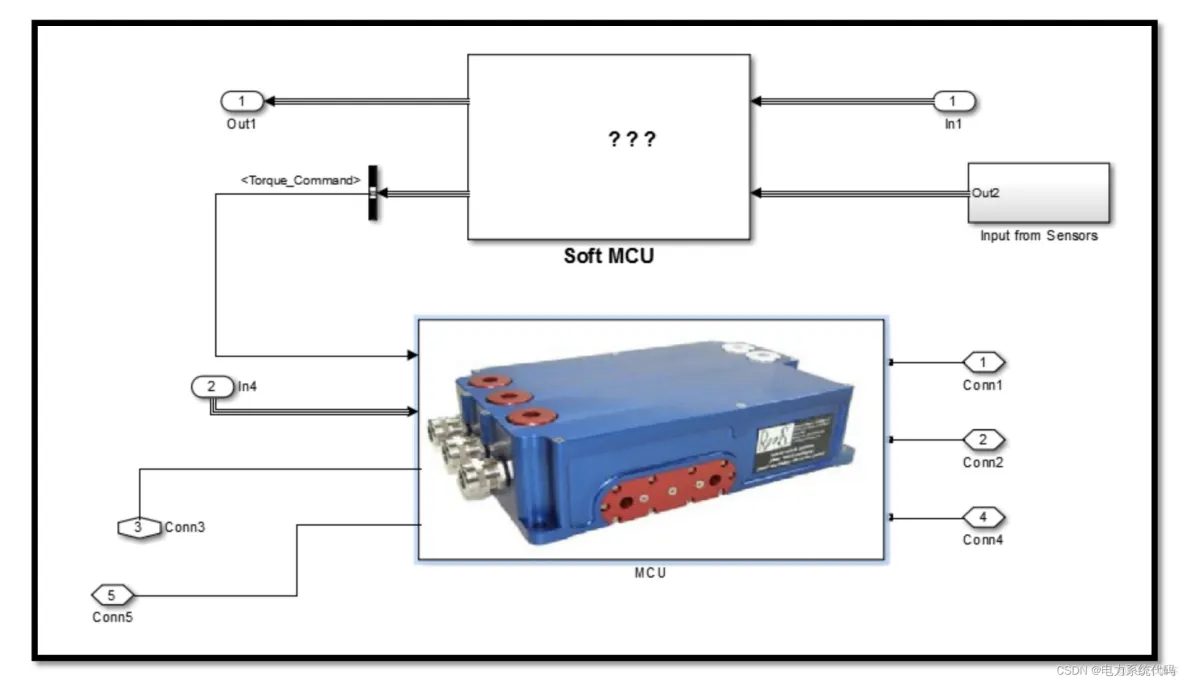
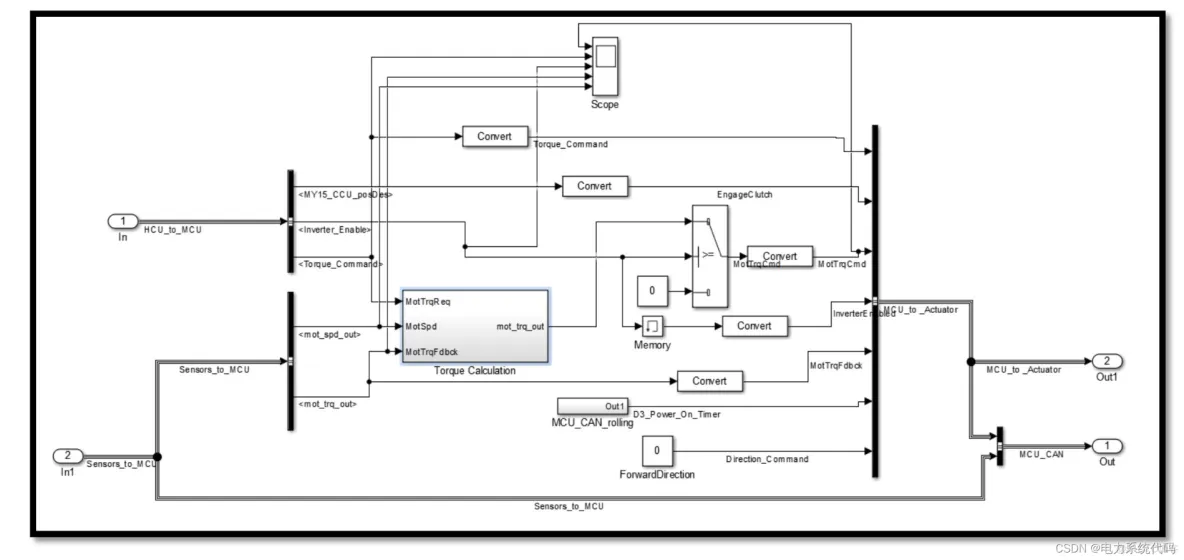
子系统软ECU接收来自HCU和传感器的信号,并计算所需的动作以获得所需的扭矩。该子系统是从提供的软MCU模型导入的,因为提供的模型足以满足本文的需求。
本文全部模型及程序需要点这里:
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















