















































软件

产品


1、内容简介
论述了电子驻车制动控制系统的基本结构 、组成及功能,并基于 Matlab/Simulink ,构建了包括直流电机 、丝杠螺母及其内部 零件和相关摩擦力分析的仿真模型,对仿真结果进行分析,论证了模型的有效性 。
2、内容说明
Simulink 是一个用来对动态系统进行建模 、仿真和分析的软件 包,它支持连续 、离散及两者混合的线性和非线性系统,也支持具有多 种采样频率的系统 。 在 Simulink环境中,利用鼠标就可以在模型窗口 中直观地 “ 画 ”出系统模型,然后直接进行仿真。
它为用户提供了方框 图进行建模的图形接口,采用这种结构画模型就像你用手和纸来画一 样容易 。它与传统的仿真软件包微分方程和差分方程建模相比,具有 更直观 、 方便 、 灵活的优点 。 Simulink 包含有 sinks (输入方式) 、 source(输入源) 、 linear(线性环节)、nonlinear (非线性环节) 、 connections(连 接与接口)和 extra(其他环节)子模型库,而且每个子模型库中包含有 相应的功能模块 。 用户也可以定制和创建用户自己的模块 。
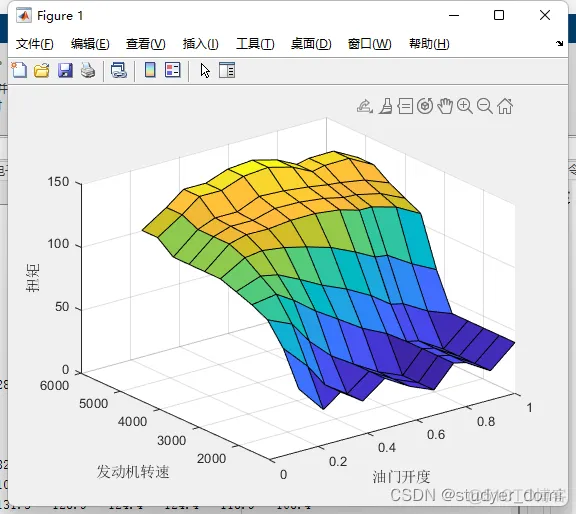
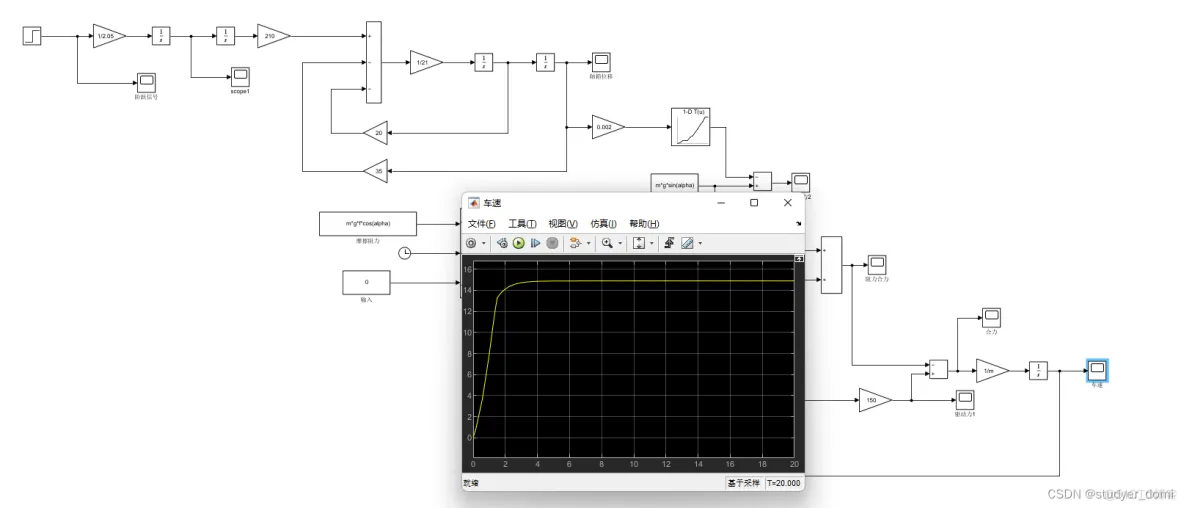
利用Matlab/simulink对电子驻车系统电 机和减速机构模型进行仿真 。 得到的仿真模型如图 5 所示 。其中电枢电 阻 R 的值取 10 ;电枢电感 L 为 0.2H ;电枢转动惯量 J 为 0.4kg*m 2 ;f= 20s*N*m ; KL=35N*m*rad -1 ; S=6mm ; i=1/12.5。
整个电子驻车系统的仿真过程为:ECU根 据传感器的信号判断车辆所处的状态,然后发出对应的信号指令,经 过一个传递函数后变为电机的输出转矩;该转矩比上整个传递系统的 转动惯量后得到对应的角加速度,经过积分得到转动速度。由于电机 中有粘性转矩的存在,这里会产生一个反向的电动势加到传递函数之 前。在得到转动速度后,继续积分得到对应的转角,这时再通过丝杠螺 母传动机构的传动比就能得到对应的直线运动,最后通过拉索直线位移对应制动力的比例可以得到输出力大小。得到输出力后还需要进行 反馈控制,这里主要是摩擦力矩和阻力矩两部分,这两部分的阻力需 要加载在电机后面 。
最后,从电子驻车制动控制系统在车辆中的实际 应用环境及系统控制的实时性考虑,选用简便易行的PID控制算法作 为电子驻车控制系统的控制器 。
3、仿真分析
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















