















































软件

产品


直流电机模型框图如下图所示,仿真参数为R=0.6,Tl=0.00833,Tm=0.045,Ce=0.1925。本次仿真采用算法为ode45,仿真时间5s。
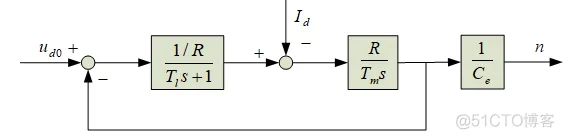
图1 直流电机模型
1、开环仿真:
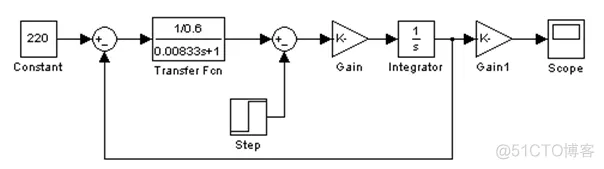
用simulink实现上述直流电机模型,直流电压Ud0取220V,
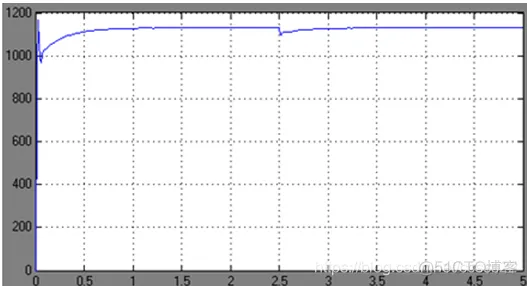
0~2.5s,电机空载,即Id=0;
2.5s~5s,电机满载,即Id=55A。
画出转速n的波形,根据仿真结果求出空载和负载时的转速n以及静差率s。改变仿真算法,观察效果(运算时间、精度等)。
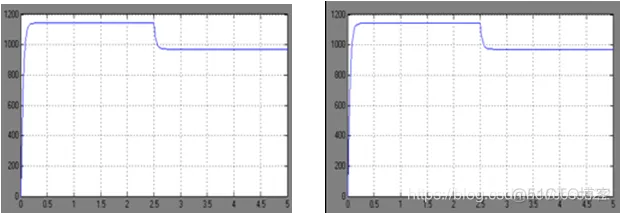
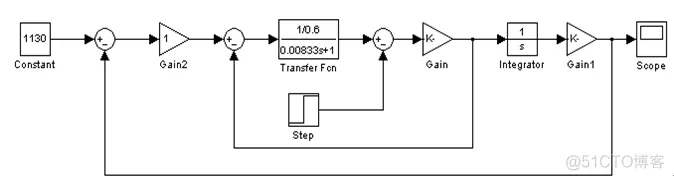
仿真模型图为:
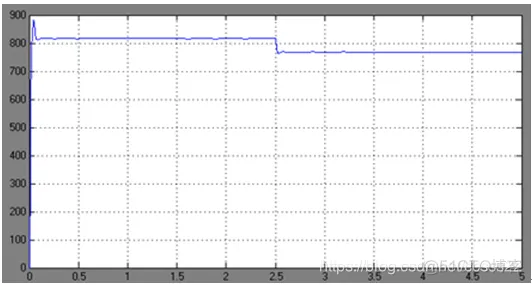
示波器所示转速波形为:
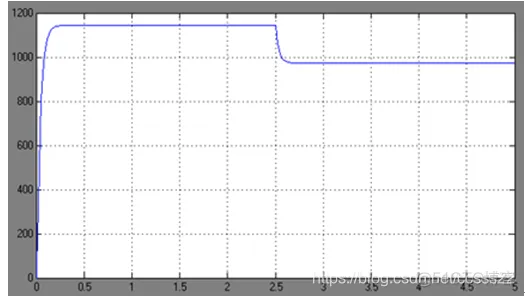
读图知:空载时转速n=1143r/min,负载时转速n=971r/min,静差率s=15.048%
改变仿真算法:
①ode23 ②ode113
③ode15s ④ode23s
⑤ode23t ⑥ode23tb
改变仿真算法,转速波形基本没有发生变化。
2、闭环仿真:
在上述仿真基础上,添加转速闭环控制器,转速指令为1130rpm,
0~2.5s,电机空载,即Id=0;
2.5s~5s,电机满载,即Id=55A。
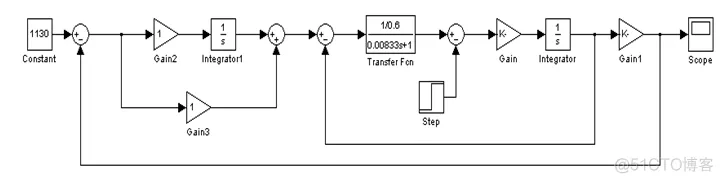
图2 转速闭环直流电机调速控制框图
控制器为比例环节:试取不同kp值,画出转速波形,求稳态时n和s并进行比较。
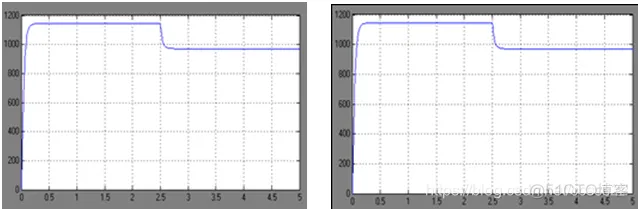
仿真模型图为:
示波器所示转速波形为:
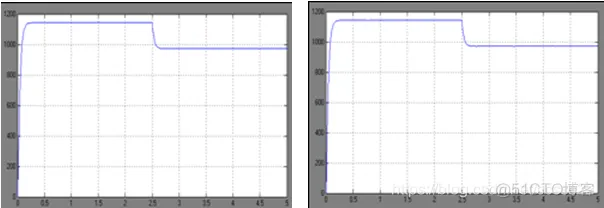
①Kp=0.5
空载转速n=816r/min,稳态时转速n=768r/min,静差率s=5.88%
②Kp=1
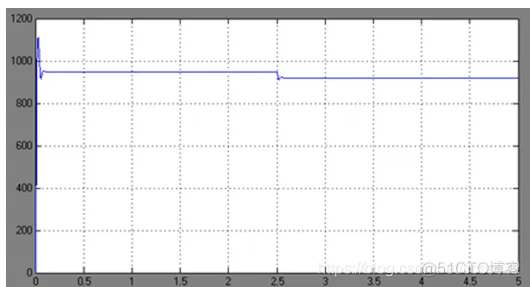
空载转速n=948r/min,稳态时转速n=920r/min,静差率s=2.95%
(2)控制器为比例积分环节,设计恰当的kp和kI值,并与其它不同的kp和kI值比较,画出不同控制参数下的转速波形,比较静差率、超调量、响应时间和抗扰性。
仿真模型图为:
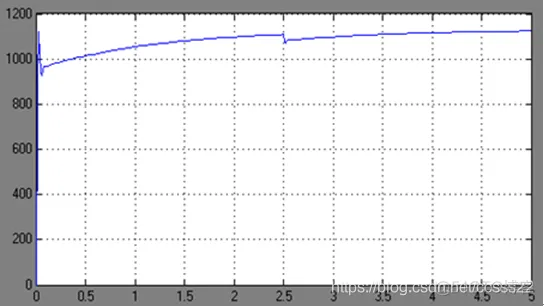
示波器所示转速波形为:
① Kp=1,Ki=1
在仿真时间内并未达到稳定状态,有超调量
② Kp=1,Ki=5
空载转速n=1130r/min,稳态时转速n=1130r/min,静差率s=0,超调量=3.54%
闭环反馈控制系统是按被调量的偏差进行控制的系统,只要被调量出现偏差,它就会自动产生纠正偏差的作用。而转速降落正是由负载引起的转速偏差,显然,闭环调速系统应该能大大减少转速降落。
1)控制器为比例环节时
由实验波形可知,Kp值越大,稳定后的转速n就越大,超调量也越大,静差率s则越小。静差率s反映的是闭环反馈效果,s越小,闭环反馈效果则越好,即Kp值越大,闭环反馈效果则越好。在实际中,我们希望得到的是超调量小(即希望Kp小)和闭环反馈效果好(即希望Kp大)的系统,但是这二者却是相互矛盾的,我们只能从中选取一组最优平衡值,使得在较小超调量和较好反馈控制下系统能够最大限度的最好工作。
2)控制器为比例积分环节时
超调量和响应时间受Kp、Ki共同控制,在相同Kp下,Ki越大,上升速度越快,响应时间越短,超调量越大;在相同Ki下, Kp越大,上升速度越快,响应时间越短,超调量越大。即Kp*Ki的值越大,上升速度越快,响应时间越短,但是超调量越大(Kp小于1时无超调量)。
静差率在仿真时间内为0,即实现了无静差调速系统。
当Kp取一定值时,Ki的值在增大到一定程度时,会产生振荡发散现象。
比较开环系统与闭环系统知,开环调速系统受到外界的干扰信号影响较闭环调速系统大;闭环系统的静差率比开环系统的小,且带比例放大器的反馈控制闭环调速系统是有静差的调速系统,而采用比例积分调节器的闭环调速系统则基本上实现了无静差调速,闭环反馈效果较好。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















