软件

产品


摘要
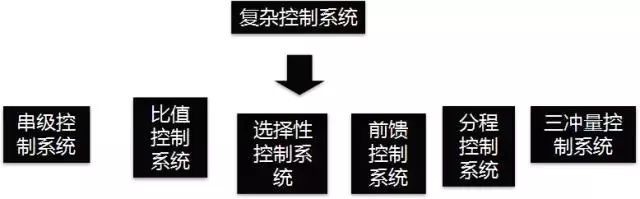
控制系统一般又可分为简单控制系统和复杂控制系统两大类,所谓复杂,是相对于简单而言的。凡是多参数,具有两个以上变送器、两个以上调节器或两个以上调节阀组成多回路的自动控制系统,称之为复杂控制系统。
目前常用的复杂控制系统有串级、比值、前馈-反馈、选择性、分程以及三冲量等,并且随着生产发展的需要和科学技术进步,又陆续出现了许多其他新型的复杂控制系统。
1串级控制系统
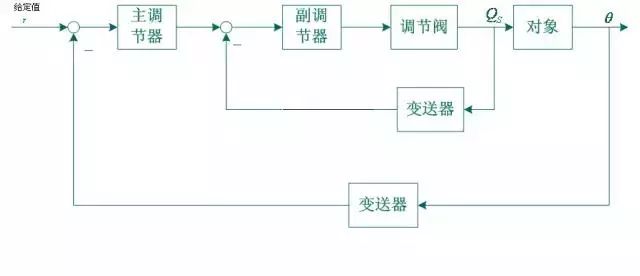
串级控制系统是应用最早,效果最好,使用最广泛的一种复杂控制系统,它的特点是两个调节器相串联,主调节器的输出作为副调节器的设定,当对象的滞后较大,干扰比较剧烈、频繁时,可考虑采用串级控制系统。
1、基本概念
串级控制系统(Cascade Cont ro1System)是一种常用的复杂控制系统,它根据系统结构命名。它由两个或两个以上的控制器串联连接组成,一个控制器的输出作为另一个控制器的设定值,这类控制系统称为串级控制系统。
2比值控制系统
在炼油、化工等生产过程中,经常要求两种或两种以上的物料,按一定比例混合后进行化学反应,否则会发生事故或浪费原料量等。工业生产上为保持两种或两种以上物料比值为一定的控制叫比值控制。
1、基本原理
一个物料流量需要跟随另一物料流量变化。前者称为从动量,后者称为主动量。通常选择的主动量应是主要的物料或关键物料的流量,它们通常是可测不可控,物料不足时,可能会影响安全生产的物料流量。
2、比值控制系统方案
常见的比值系统有单闭环比值、双闭环比值、串级比值等三种。
(1)单闭环比值控制系统
(2)双闭环比值控制系统
(3)串级比值控制系统
3、比值控制系统的实施方案
在比值控制系统中,可用两种方案达到比值控制的目的,一种是相乘方案,一种是相除方案。
(1)相乘方案
用主动量信号乘以比值作为从动量控制器的设定值;
主动量信号作为从动量控制器的设定,从动量乘以比值作为从动量控制器的测量。
相乘控制方案的特点:
相乘控制方案的特点:
3选择性控制系统
一般控制系统都是在正常工况下工作的,当成产不正常时,通常的处理方法有两种。一种是切入手动,进行遥控操作;另一种是连锁保护紧急停车,防止事故发生,即所谓硬限控制。由于硬限控制对生产和操作都不利,近年来采用了安全软限控制。
1、基本原理
所谓安全软限控制,是指当一个工艺参数将要达到危险值时,就适当降低生产要求,让它暂时维持生产,并逐渐调整生产,使之朝正常工况发展。能实现软限控制的控制系统称为选择性控制系统,又称为取代控制系统或超驰控制系统。
通常把控制回路中有选择器的控制系统称为选择性控制(selective control)系统。选择器实现逻辑运算,分为高选器和低选器两类。高选器输出是其输入信号中的高信号,低选器输出是其输入信号中的低信号。
2. 基本的结构和性能分析
3、实例分析
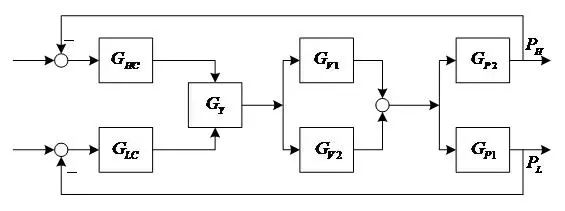
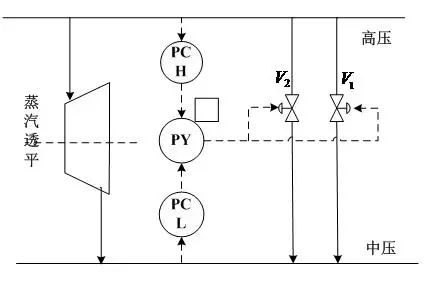
蒸汽减压控制系统
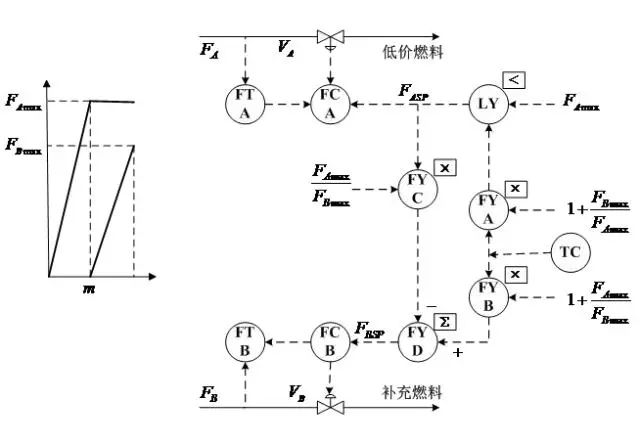
加热炉燃料的选择性控制系统
4、积分饱和及其防止措施
对于具有积分作用的调节器,若处于开环状态,由于偏差存在,调节器的输出随着时间增加,会达到最大或最小极限值,这就是调节器的积分饱和现象。在选择控制系统中,两个调节器中总有一个是处于开环状态,不论哪个调节器,只要有积分作用存在,都有可能产生积分饱和现象。
常见积分饱和方法有三种:
(1)限幅法
采用高值或低值限幅器,使调节器的输出信号不超过工作信号的最高值和最低值。
(2)积分切除法
所谓积分切除法,即当调节器具有IP作用时,一旦处于开环状态,立即切除积分功能,只具有比例控制规律。这是一种新型的特殊设计的调节器。
(3)积分反馈法
调节器在开环状态下不选用调节器自身的输出值作反馈,而是借用其他相应的信号用外反馈的方法作为调节器的反馈信号,这样可以防止调节器积分饱和现象的发生。
4前馈控制系统
简单控制系统属于反馈控制,它的特点是按被控变量的偏差进行控制,因此只有在偏差产生后,调节器才对操纵变量进行控制,以补偿扰动变量对被控变量的影响。若扰动已经产生,而被控量尚未发生变化,控制作用是不会产生的,所以,这种控制作用总是落后于扰动作用的,是不及时的控制。对于滞后大的被控现象,或扰动幅度大而频繁时,采用简单控制系统往往不能满足工艺生产的要求,若引入前馈控制,实现前馈-反馈控制就能获得显著的效果。
1、工作原理
反馈控制系统的输出是偏差的函数,只有出现偏差才进行调节,因此,调节不及时。如果采用某种控制策略。使该控制运算的输出是扰动的函数,则一旦扰动出现,控制就有输出,就能在偏差还未出现以前就把扰动的影响消除,因此,调节及时。依据预防的控制策略设计的控制系统称为前馈控制系统(Feedforward Control System)。实际应用中由于存在某些原因,不常采用单纯前馈控制,而通常采用前馈控制与反馈控制结合组成的前溃—反馈控制系统。
2、基本结构
常用的前馈控制系统:
精馏塔相乘前馈-反馈控制
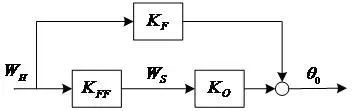
相乘型的前馈-反馈控制系统框图
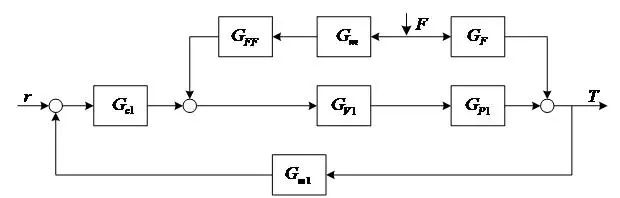
加热炉的相加型前馈-反馈控制系统
相加型前馈-反馈控制系统框图
3、前馈控制规律的设计
(1)静态前馈控制的设计 :以换热器为例
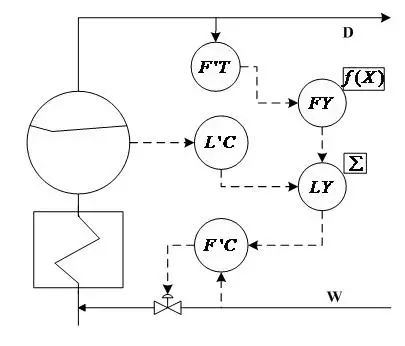
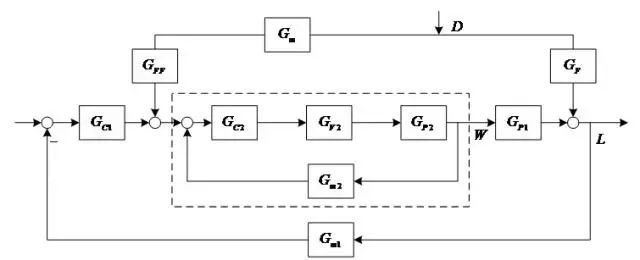
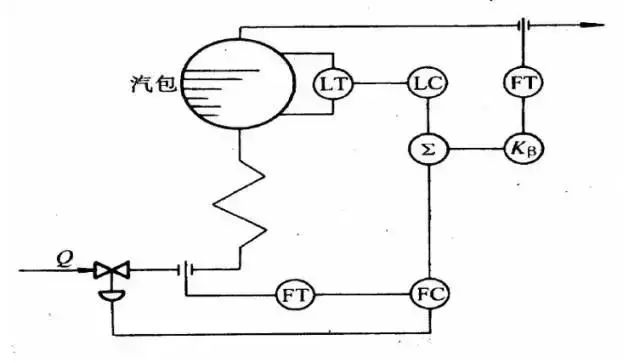
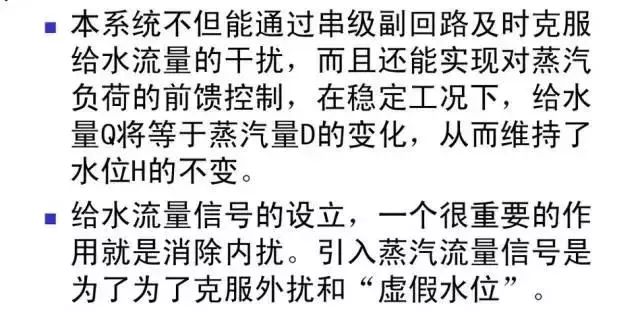
(2)动态前馈控制的设计 :锅炉汽包水位控制系统如下图所示
锅炉前馈—串级反馈控制系统框图
4、前馈拉制系统的投运和参数整定
(1)先设置静态前馈系数,通常采用闭环整定法。
(2)再调整动态前馈参数。
5分程控制系统
简单控制系统就是一个调节器的输出带动一个调节阀动作,而分程控制系统的特点是一个调节器的输出同时控制几个工作范围不同的调节阀。
1、工作原理
分程控制原理:通常,在一个控制系统中,一个调节器的输出信号只控制一个执行器或调节阀(以下均以气动执行器为例),其结构与特性见下图。
如果一个调节器的输出信号同时送给两个调节阀,构成如下图所示的系统,这就是一种分程控制系统。这里两个阀门并联使用,它们都是气开阀,其工作特性如图(b)所示。
由于阀门有气开和气关两种特性,两个阀门就有四种组合特性,如下图所示。图(a)和(b)时两个阀门同方向运动,(c)和(d)表明两个阀门作用方向相异。理论上讲,分程控制可以是两个以上阀门共同控制,但实际上,一般采用的都是两个阀门分程。
2、分程控制系统对调节阀的要求
(1)关于流量特性的问题
因为在两只调节阀的分程点上,调节阀的流量特性会产生突变,这在大、小阀并联时更为突出。
(2)根据工艺要求选择同向或异向规律的调节阀
在分程控制线系统中,调节阀的开关形式可分为两类。一类同向规律调节阀,即随着调节阀输入信号哦的增加,两个阀门都开大或关小。另一类称为异向规律的调节阀,即随着调节阀输入信号的增加,一个阀门关闭,而另一个阀门开大,或者相反。
(3)泄漏量问题
分程控制系统中,尽量应使两只调节阀都无泄漏,特别是对大、小阀并联使用时,如果大阀的泄漏量过大,小阀将不能正常发挥作用,调节阀的流量可调范围仍然得不到增加
(4)调节器参数整定问题
当分程控制系统中两只调节阀分别控制两个操纵变量时,这两只阀所对应的通道特性可能差异很大,即广义对象特性差异很大。这时,调节器参数整定必须注意,需要兼顾两种情况,选取一组合适的调节器参数。
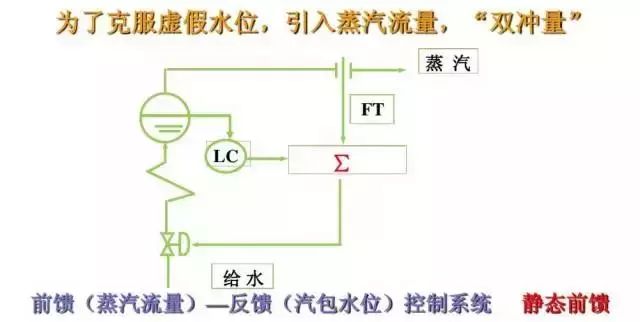
6三冲量控制系统
锅炉汽包液位是表征生产过程的主要工艺指标,同时也是保证锅炉安全运行的主要条件之一。液位过高,使蒸汽产生带液现象,不仅降低了蒸汽的产量和质量,而且,还会使过热器结垢,或使汽轮机叶片损坏;当液位过低时,轻则影响水汽平衡,重则烧干锅炉,严重时会导致锅炉爆炸等事故,所以锅炉水位是一个极为重要的被控变量。
所谓冲量,实际就是变量,多冲量控制中的冲量,是指引如系统的测量信号。在锅炉控制中,主要冲量是水位;辅助冲量是蒸汽负荷和给水流量,它们是为提高控制品质而引入的。现今蒸汽锅炉趋向大、中型化,一般都采用水位、蒸汽测量(或压力)和给水测量进行三冲量控制。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020