软件

产品


引 言
开关磁阻电机(SRM)具有结构简单、转子无绕组和永磁体,与其他电机相比较转动惯量小,可以高速旋转、可靠性高的优点,增加了开关磁阻电机的使用范围。但是SRM具有转矩脉动大和噪声大的缺点。精确控制需要精确的位置信号。合适的开关角随着电流与转速的不同而变化。这篇论文研究了离线状态下的开关角。
电流换相过程中考虑了两个不同的控制目标:
1、给定电流下的最大输出转矩;
2、最小的转矩脉动。开关角被看做相电流与转速的函数。计算所得的最佳值被储存到计算机系统中构成一个二维表格。
在SRD仿真模型上进行了优化过程,并进行了进一步的实验验证。
SRM模型
通常做以下假设:定转子尺寸是理想的,忽略涡流和相间互感。在此假设下,SRM的转矩可以表示为每个相转矩的和,每个相转矩只与各自的相电流和转子位置相关。相转矩可以从磁链-电流-转子位置角特性曲线得出来。这些曲线可以通过静态测量获得,并存入二维表格中。这个方法需要大量测量或计算。并且表格也是比较难建立的。并且二维表格在实时控制过程中也是低效的。为了避免上述提到的困难,通过对转矩公式化简,可以将磁链与转矩变化为两个一维函数。从而通过简化后的模型离线计算出最佳开关角。
优化过程
通过模型分析了SRM的两个控制目标。第一个目标是使得平均转矩与参考电流比值最大;第二个目标是转矩的均方根与平均转矩比值最大。将这两个目标看作转速和电流值的函数。通过MATLAB完成仿真和优化程序,通过MATLAB工具箱中的OPTIMZATION来解决优化问题。结果如图1所示。
图1 两种控制目标下不同电流与转速的开关角 A)转矩与参考电流的比值最大B)最小转矩脉动
仿真结果
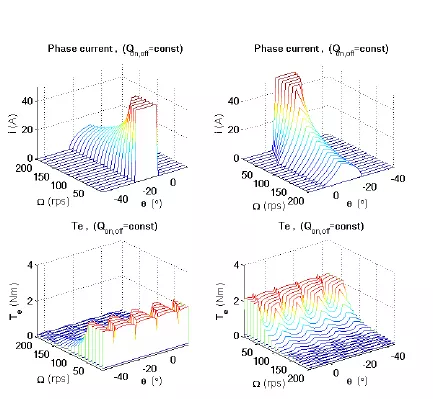
当开关角分别固定为-22.5°与-7.5°时电流与转矩的仿真结果如图2所示:
图2 开关角分别固定为-22.5°与-7.5°时电流与转矩波形图
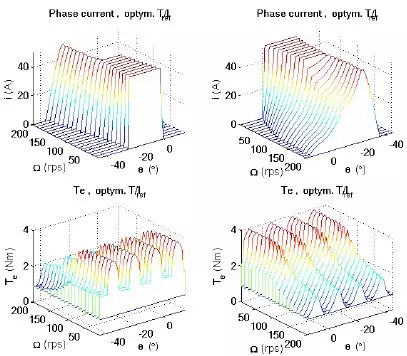
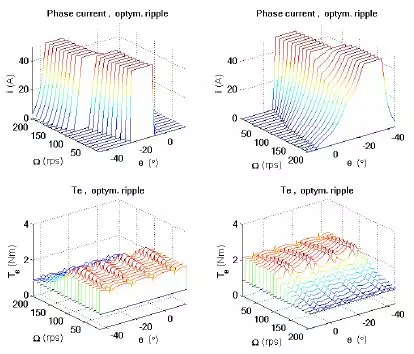
图3和4分别为转矩与参考电流的比值最大和最小转矩脉动下的电流转矩波形图
图3 转矩与参考电流的比值最大下的电流转矩波形图
图4 最小转矩脉动下的电流转矩波形图
实验结果表明,最小转矩脉动目标控制获得了转矩波动最小值,约为转矩平均值的5%。以最大转矩为控制目标的转矩波动大于20%的平均转矩值。而固定开关角的转矩波动在5%-15%之间。
实验验证
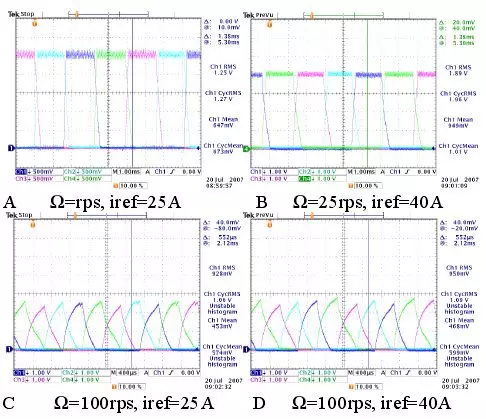
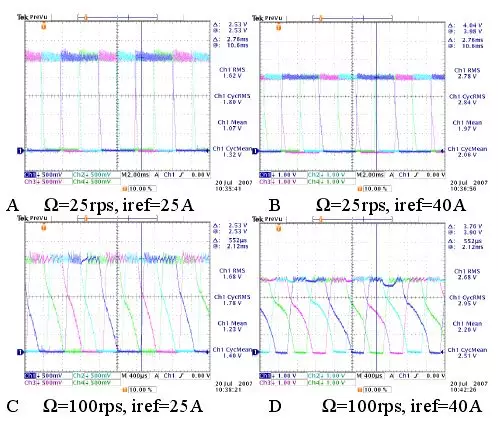
通过DSP与FPGA构成控制器,在SRM上实现所提控制。实验结果如图5和6所示。其中图5为固定开关角下不同转速下的电流波形,图6为所提方法下的电流波形。
图5 固定开关角不同转速下的电流波形
图6 变开关角不同转速下的电流波形
通过比较图5与图6可以看出,固定开关角在高速(100rps)时不适用,而变开关角则可以很好地用于高速情况。
结 论
高性能的SRM驱动器要求对电流换相角进行精确控制,并且要随着转速与电流的变化而变化。换相角的选择可以根据不同的控制目标而进行不同的选择。在本文中研究了转矩与电流比值最大与最小转矩脉动两个控制目标下的开关角优化。第一个优化目标适用于高速情况,第二个控制目标适用于低速情况。优化过程可以在离线情况下完成,然后将所得优化值储存到表格中。实验结果表明,所提控制方法取得了良好的结果。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020