















































软件

产品


摘 要:
整车VBC(Vehicle Basic Calibration)标定是指整车基础模型标定,在发动机台架匹配完成后,项目工程师将数据移植到整车时,需进行发动机与车辆的匹配检查。主要包括充气模型、排气温度、燃油温度、混合气控制、增压控制等发动机模型。其标定形式主要包括转毂和道路两部分,转毂主要以稳态工况为主,道路试验则更侧重于瞬态控制。传统的VBC标定主要是通过在线的优化调整,需工程师携带通讯设备在车上开展工作。而目前计算机仿真已成为解决工程实际问题的重要手段,基于某量产车型,详细论述了整车VBC标定的Simulink建模过程及离线标定方法。结果表明,在测试数据质量满足要求的前提下,采用论述的方法不仅能够获得高精度标定结果,还能大幅度提高整车VBC标定的效率。
关键词:仿真建模;离线标定;MATLAB/Simulink;VBC;
引言
整车VBC标定,简单地讲就是发动机在整车上的匹配,通过标定优化ECM中进气模型、扭矩模型、喷油点火、增压控制等来最大程度地发挥发动机在整车上的性能并且保证发动机不受损坏,它是整个整车标定的基础。车辆基本匹配所得的数据对整个项目具有重要意义,因此所选的试验车必须车况良好,进排气系统尽量与批产状态一致,发动机运行良好且处于合理偏差范围之内,机油、冷却水液位正常,轮胎状况良好且胎压正常。在拿到项目试验车辆后,需根据发动机在车辆上的布置进行改造。主要包括加装LA4 Lambda分析仪、机油热电偶、排气系统及GPF温度热电偶、燃油温度热电偶、电源盒等。需要注意的是热电偶上一定要标明名称,且安装完毕后须检查热电偶处是否存在漏水、漏机油、漏气等现象。
传统的VBC标定,需要标定工程师和试验工程师相互配合,花费大量时间在整车转毂上进行稳态标定并在道路上进行瞬态标定,整个过程需要在线优化并且反复验证。某些验证工况涉及的路况及驾驶策略较为极端,长时间反复驾驶容易产生安全隐患。本文介绍的基于MATLAB Simulink建模的VBC离线标定方法即可用于转毂试验也适用于道路试验。相对于传统标定手段更加高效,这在行业内是突破性的标定方法,每个整车项目能节约上百小时的转毂时间,降低项目开发费用。并且使用离线标定的方法可以使标定结果有更高的模型精度,降低售后市场故障率。
1 模型的搭建
离线标定流程如图1所示[1,2,3,4]。
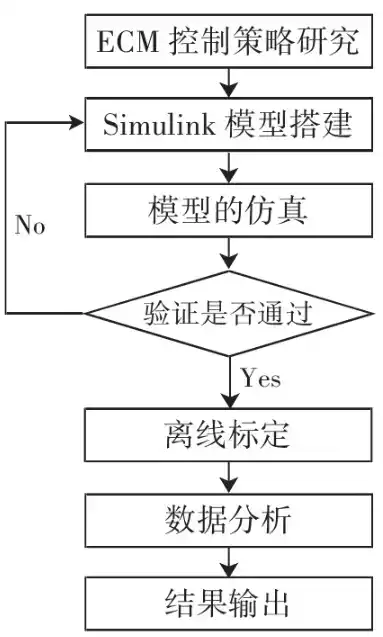
图1 离线标定流程图
整车VBC离线标定的第一步也是最关键的一步是搭建模型。打开MATLAB软件,进入Simulink工作界面,配置好Simulink环境,根据ECM电控系统的控制逻辑搭建相应的仿真模型。对于建模,Simulink提供了非常方便的图形建模方式,通过单击、拖放和连接不同模块来完成仿真模型的建立,其本质上就是图形化的编程。Simulink包括非常全面的模块库,方便用户快速建立系统模型。在搭建模型的过程中,需正确理解ECM控制策略中各个模型符号的具体含义并能够在Simulink Library中找到相对应模块。
Simulink模型中的信号总是由模块之间的连线携带并传送的,建模时考虑到一些模型的复杂程度较大,可以采用从输入到输出或者从输出到输入的顺序,这种建模方法思路清晰,对各模块的相互作用和组织形式一目了然。某电控系统燃油温度模型如图2所示。
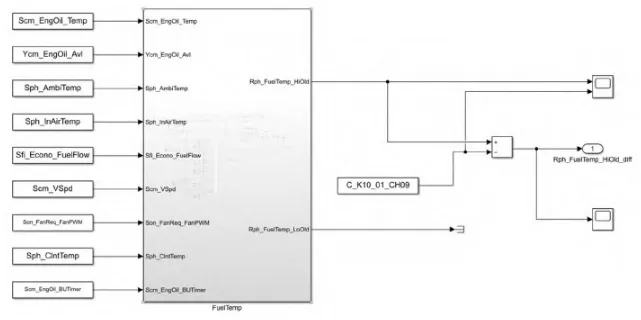
图2 某电控系统燃油温度模型
2 模型的仿真
模型仿真的意义在于确认和校验搭建的模型是否与ECM控制策略完全一致,为离线标定做最后的准备。
在搭建好模型之后和运行仿真之前,需要将模型中用到的标定量、输入量和输出量导入到MATLAB Workspace中。另外为快速检索模型中的纰漏,一些重要的中间变量也需采集并导入。标定量存在于ECU Description File中,务必将采集数据时所使用的标定数据导入到MATLAB Workspace,如图3所示。

图3 将标定量由A2L&HEX中导入到MATLAB Workspace中
导入的过程需使用自行开发的工具,完成后须在MATLAB中确认标定量的格式,尤其是Table及Map的坐标。要保证模型中所使用到的标定量在MATLAB Workspace中有一一对应的关系。
测量量保存在INCA采集的DAT文件中,采集数据时要注意测量量里必须包含所有模型输入量,所有量的测量频率最好是该模型的调度周期或者更高精度的频率。将测量量由INCA DAT文件中导入到MATLAB Workspace中时,注意不同的导入工具生成的文件,在Workspace中格式略有不同,如图4所示。完成后在MATLAB使用From Workspace模块对测量量进行调用,确认数据的完整性和准确性。
完成数据的导入后,应对仿真参数进行设置,单击Simulink菜单下面的Model Configuration Parameters项或者直接按快捷键“Ctrl+E”,便会弹出图5设置界面。它包括仿真器参数(Solver)设置、工作空间数据导入/导出(Data Import/Export)设置等。
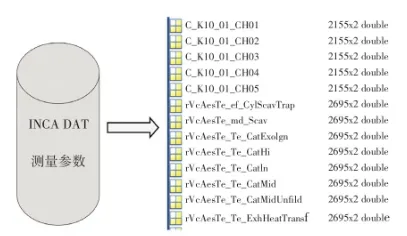
图4 将测量量由INCA DAT文件中导入到MATLAB Workspace中
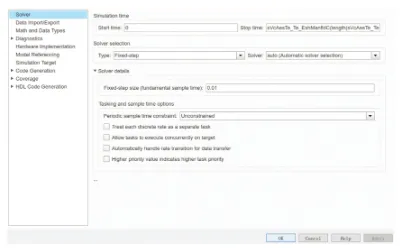
图5 Simulink设置窗口
进行模型仿真时,需要重点对仿真时间及仿真步长进行设置。仿真时间起始时间默认为0,仿真终止时间则由测量文件的长短决定,本文采用的仿真终止时间是测量文件中模型输出量的长度。仿真步长模式有Variable-Step(变步长)和Fixed-Step(固定步长)两种方式。变步长模式的仿真过程较为复杂,在进行模型仿真时,我们采用固定步长的模式。采用定步长模式后,对Fixed-step size进行设置,这里需要注意其步长与ECM中模型的调度周期要保持一致。此外,模型中使用的Lookup Table模块,也要进行参数设置。Lookup Method需选为InterpolationUse End Values使其外插方法与ECM逻辑中的保持相同。
Simulink中各个仿真参数完成配置后,即可运行模型。使用示波器Scope对需要标定的参数进行观察,模型计算值与实际测量值完全重合表明搭建的模型与ECM控制逻辑一致,若两者不重合则需寻找模型的错误之处进行修正。一般滤波初始值的设置以及模型中包含闭环逻辑的初始值的设置需要重点关注,另外一些模型中的中间变量无法直接测量采集,则需要计算出其初始值。不断运行模型进行仿真,直至两者完全重合(如图6所示),方可开始下一步离线标定的工作。

图6 红色模型值与绿色测量值完全重合
3 离线标定
完成模型的仿真验证之后,就可以开始离线标定优化工作了。用示波器(Scope)将需要标定的量显示出来,这里需要注意标定时的测量量与模型验证时是有区别的。前者是指实际的测量值即车辆改装外加传感器的值,后者是ECM策略中计算的模型值。在示波器(Scope)中可以直观地监测不同工况下偏差的分布情况,根据策略模型找到对应的标定量双击进行编辑调整,然后再次运行模型查看偏差的情况,直至偏差满足验收标准,如图7、8所示。
进行离线标定的优势在于我们只需在Simulink中修改标定并运行模型即可快速验证不同的标定思路和方法。
完成离线标定后,对模型偏差进行分析,然后将调整优化的标定参数导入到ECU Description File中进行实车验证。如果所有工况的偏差都在标准要求范围内则整个标定优化过程结束,冻结标定数据。
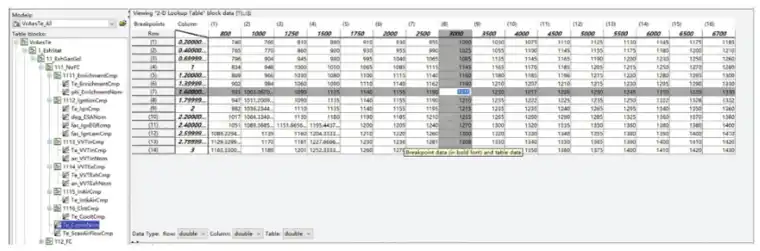
图7 在Simulink中调整标定量

图8 标定完成后红色模型值与绿色实际值的偏差情况
值得一提的是,如果有相同电控系统的项目,则可以直接运用本文的Simulink模型进行离线标定。可省去复杂的建模及仿真过程,更高效地完成标定工作。
4 结论
基于MATLAB Simulink建模,可以对发动机控制模型进行仿真,并实现整车VBC的离线标定。本文介绍的基于MATLAB Simulink建模的整车VBC离线标定方法,在行业内是突破性的标定方法。可以应用推广到不同电控系统的车型,大幅度提高VBC标定的精度和效率。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















