















































软件

产品


行业:航空航天
挑战:后货舱门开启和关闭时手柄力 值过大的原因
Altair 解决方案:利用MotionView/MotionSolve 对后货舱门进行多体动力学分 析
优点:精确模拟机构运动 ; 加速研发流程
背景介绍
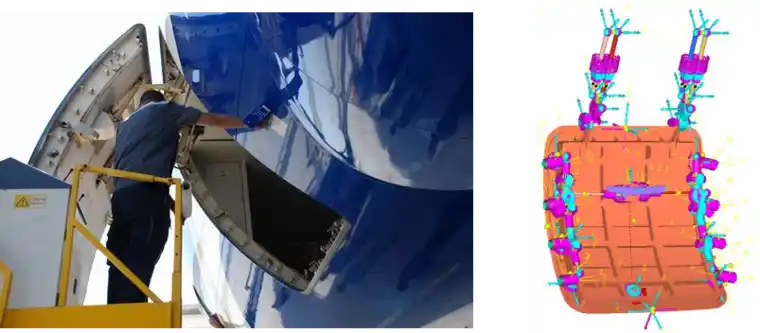
舱门是民用飞机机身中的重要且特殊的运动部件,而后货舱门是机身舱门中重 要的部件,它的主要功能是提供乘客行李装载的通道及应急撤离通道。 西安飞机工业(集团)有限责任公司(简称西飞)是科研、生产一体化的特大 型航空工业企业,是我国大中型军民用飞机的研制生产基地,国家一级企业。西飞 使用 Altair HyperWorks 模块 MotionView/MotionSolve 建立后货舱门的多体动力学 模型,基于建模-对标-分析的完整建模流程,得到高精度的后货舱门多体动力学 刚柔耦合模型。根据后货舱门开启和关闭的运动原理,建立内手柄操纵舱门时的分 析工况。另外根据后货舱门实际使用情况,通过调整部分部件的安装角度和位置后 模拟仿真,从而找出舱门开启和关闭时手柄力值过大的原因。
挑战
利用 CAD 软件建立的后货舱门三维模型,附之材料属性,直接输入到 HyperWorks 中。运动机构转轴用衬套连接处在多体动力学模型中处理成衬套元素, 根据资料预估各方向刚度和摩擦系数。 刚体模型建立完成并通过调试仿真后,在该模型基础上,将货舱门门体和开启 机构、锁定运动机构中的主要构件替换成柔性体,机构杆件与机构杆件之间通过刚 性单元连接,螺栓采用刚性单元模拟。并采用模态综合法缩减模型自由度,提取有 限元模型的前 15 阶模态进行柔性体建模,最终建立后货舱门的多体动力学刚柔耦 合模型。后货舱门多体动力学模型包含有 4 个子系统,每个子系统由运动体、运动 副、弹簧,以及作用在运动体上的摩擦力和密封带压缩力等组成。子系统之间是相 互链接的,整个模型包含 47 个运动体,73 个运动副,5 个弹簧。
“利用MotionView/MotionSolve建立的多体动力学模型,能够精确模拟舱门机构的运动,不仅能够观察到每个运 动体的运动轨迹,还能够得到每个运动体或运动副在每个时间段的承受的力或力矩值,从而可以发现舱门机构能 否满足所期望的目标性能。” 罗涛
解决方案
根据后货舱门开启和关闭的运动原理,创建内手柄操纵舱门时的分析工况。包括模拟用内手柄操纵后货舱门解锁、开 启、关闭和锁定时的分析工况。再输出后货舱门运动过程中部分运动体的力或力矩曲线,如内手柄力矩曲线,舱门开关推 力曲线等。然后模拟内手柄操纵后货舱门解锁运动,在整个模拟运动过程中,不仅能够观察到每个运动体的运动轨迹,还 能够得到每个运动体或运动副在每个时间段的力或力矩值。在整个运动过程中,机构零部件的应力和变形都较小。
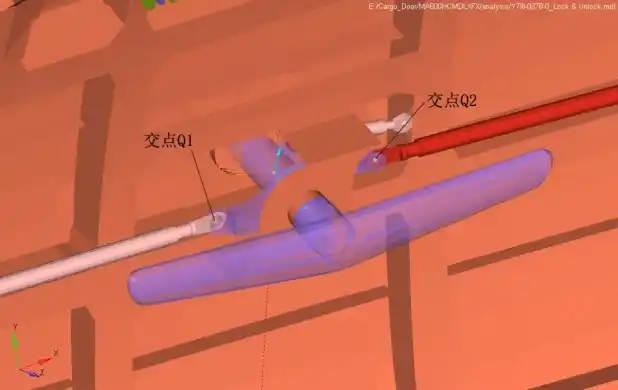
图 1 移动的交点
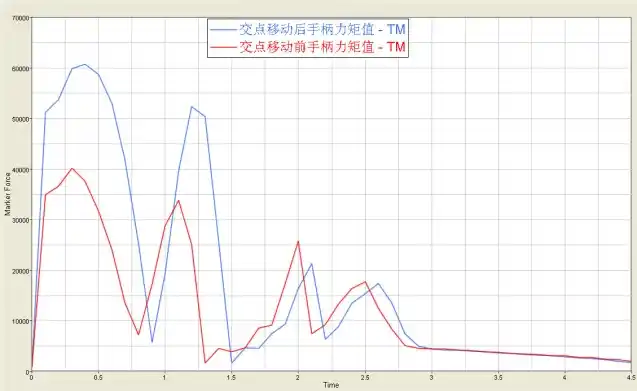
图 2 交点位置变化对内手柄开启力矩值影响
后货舱门在实际使用时,经常发生手柄力值过大甚至手柄很难转动等情况,为排除设计因素,工程师们对装配时较难 保证的内手柄支耳交点位置和锁座安装角度进行模拟仿真,评估装配精度对手柄力值的影响。
由于后货舱门解锁/锁定是由一系列机构杆件传力运动,因此,机构杆件的交点位置对手柄力值有较大影响,若在安装 过程中交点误差较大,会对手柄力值产生较大影响。对内手柄支耳与可调杆上的交点进行微调移动(如图 1 所示)。
由于内 手柄转臂轴不变,因此当交点 Q1 向下移动 3mm 时,交点 Q2 也相应的向上移动一段距离。此时,内手柄开启力矩最大值 为 60.9Nm,增加了 22.6Nm,交点位置的变化对内手柄开启力矩值影响结果(如图 2 所示)。
后货舱门解锁过程中,锁滚轮沿锁座外形滚动,当其中任何一个锁座安装角度偏差过大时,将会对手柄力值产生较大 影响。将 8 个锁座中的 1 个锁座沿逆时针方向旋转 2°(如图 3 所示)后,锁座安装角度的变化对手柄开启力矩值的影响。 (如图 4 所示)从图中可以看出,锁座安装角度一旦偏差过大,锁滚轮滚过锁座最高点时的手柄力值将会大幅增加。
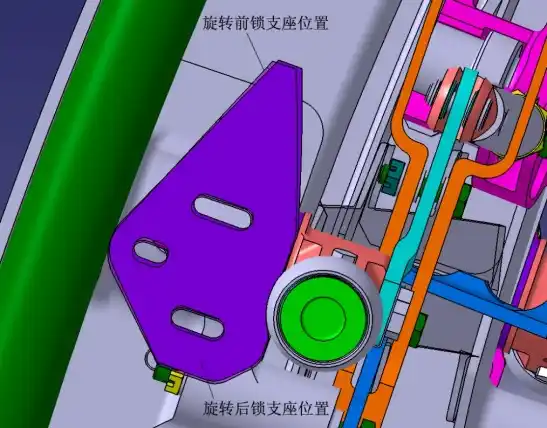
图 3 锁座安装角度变化
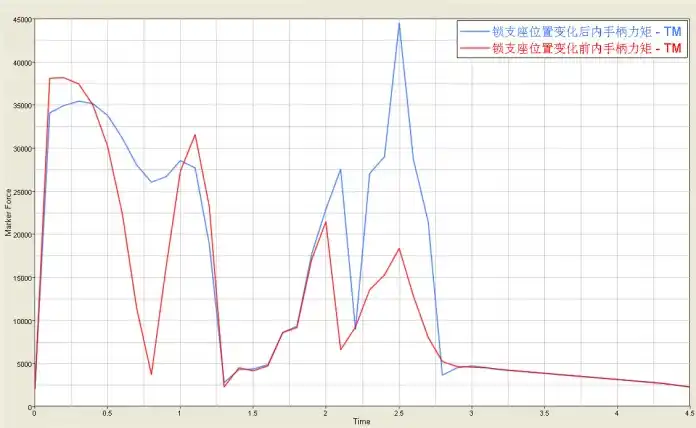
图4 锁座安装角度变化对手柄开启力矩值影响
结论
MotionView/MotionSolve 具有强大的机械仿真功能,能够输出精准的力值曲线,实现刚性体和柔性体的混合仿真,能 够为设计人员提供清晰的受力信息。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















